









参考代码:ScalableMap
动机和主要工作
直接预测向量化局部地图是较难的,那么借由粗糙到精细的思想就可以将整个任务转换为先预测局部地图大体结构,之后再通过添加控制点实现元素精细化表达。因此文章在元素解码阶段设计了粗糙到精细的预测过程,称为HSMR,而对地面元素的建模就是参考了MapTR的那套。另外对于BEV特征构建选择了两种方式:transformer和IPM投影的组合方式,这样可以有效兼顾BEV图下每个grid的离散特征和图像域中目标的连续信息。
网络结构与流程
文章算法的结构见下图所示:
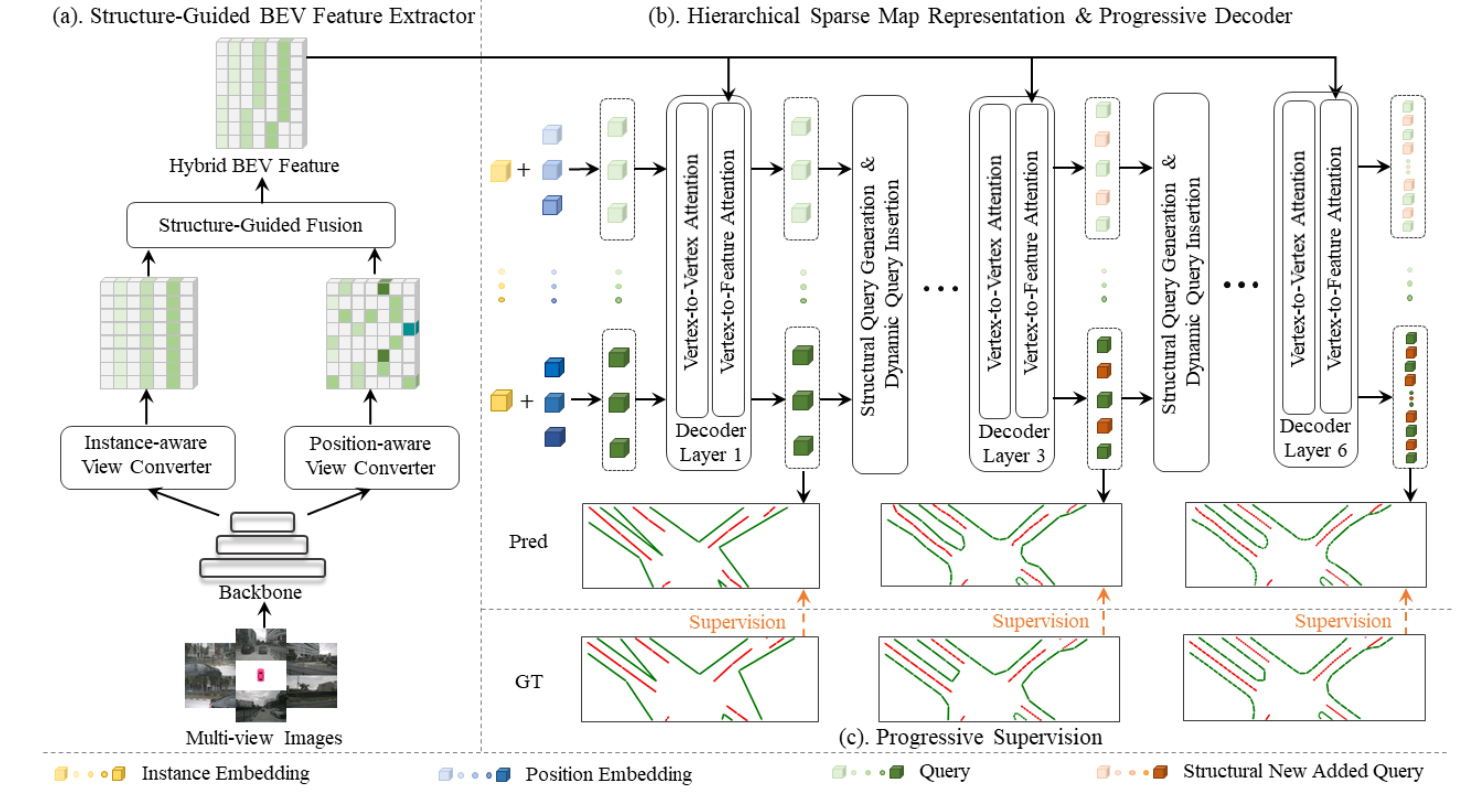
BEV特征提取
这里采用两种类型的BEV特征提取方案:基于BevFormer的deformable attention和HFT的全局MLP。前一个针对每个BEV下的grid去图像中抓取信息,后一个通过MLP从图像中获取连续且稠密的信息,同时还在后一个中添加分割任务,用以增加对环境的感知能力。
渐进级连式回归
在decoder的不同层中单个instance的顶点数量是不一致的,呈现出如下的分布:
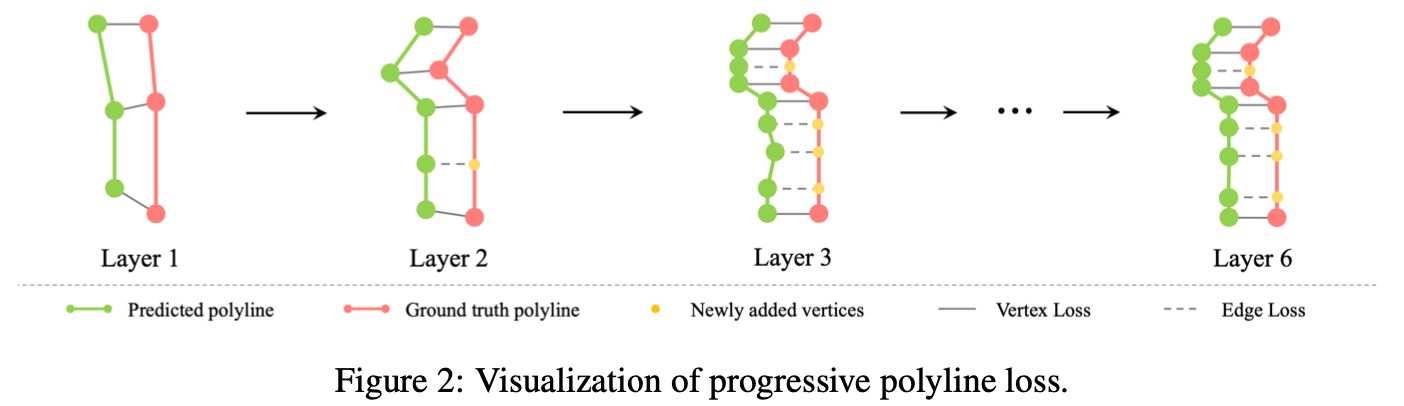
这样的结构也对应了文章渐进优化的策略,从上图可以看到对于一个instance是构建一个整体query,其中有多个顶点。那么在流转到下一层的时候多出来的顶点是怎么产生的呢?
文章给出的方案是:插值。这样确实具有一定合理性,毕竟挨得近其特征表达是近似的。
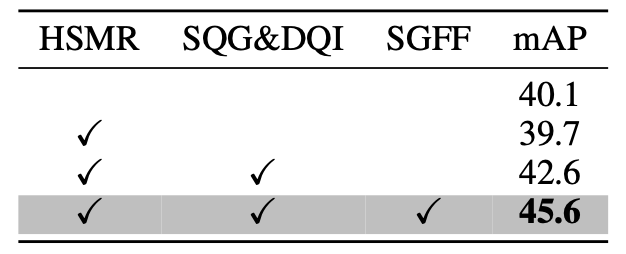
那么这样的级连优化策略、query设计和上采样机制、BEV特征提取策略三者对性能的影响见下表所示(还是特征优化来得最有效):
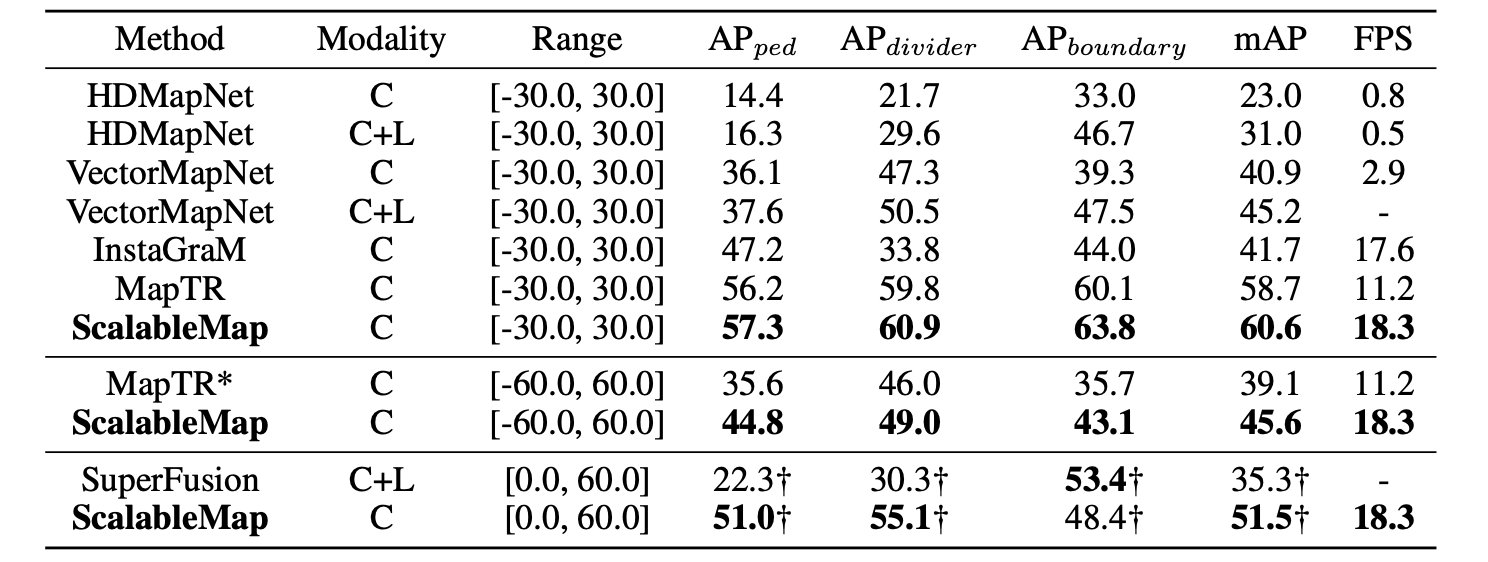
实验对比
nuScenes validation数据集:














 50
50











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









