









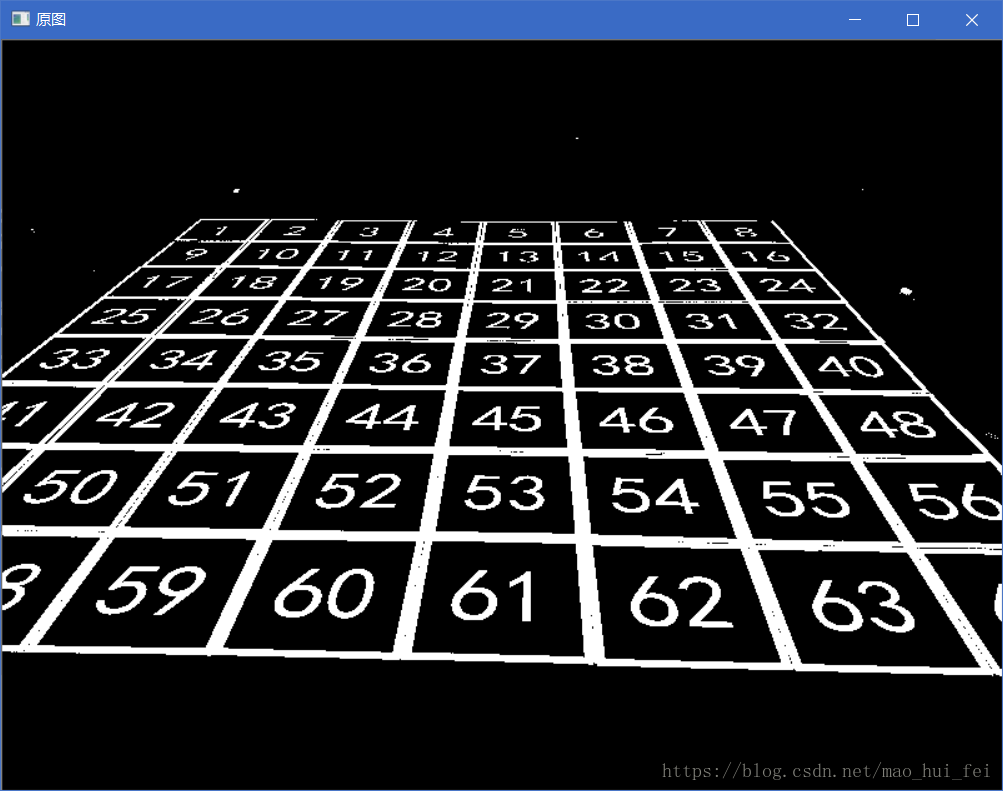
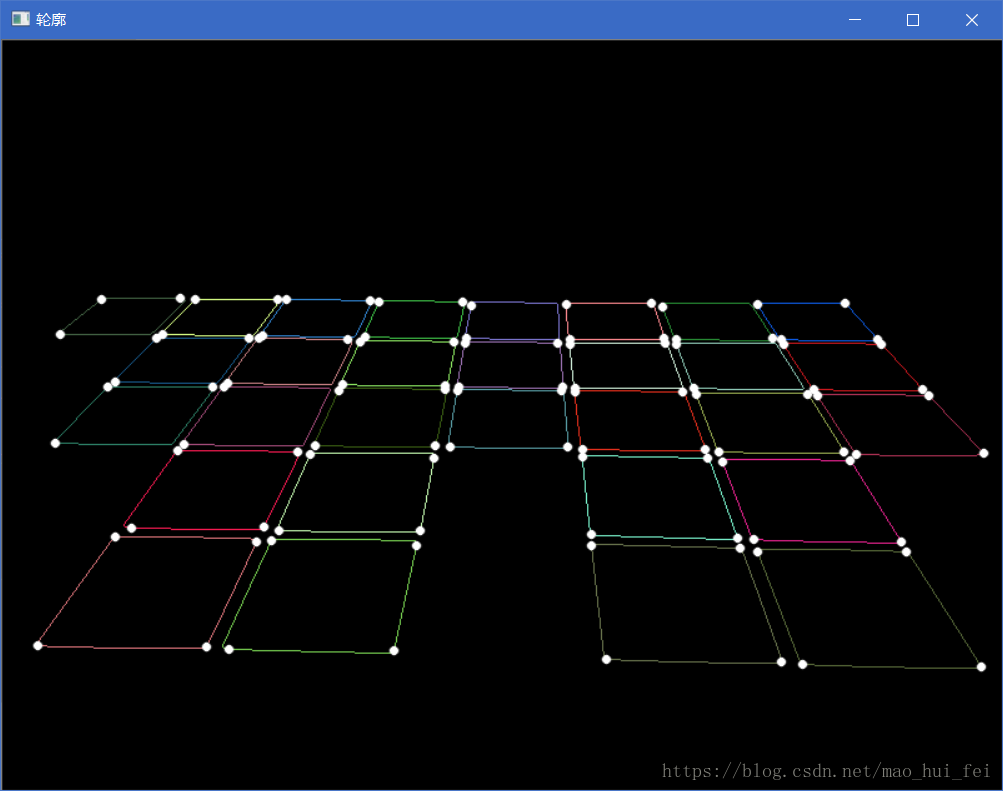
检测图中多个四边形的四个角点
/*
工程在69那个例程文件目录
检测四边形轮廓以及角点
*/
#include <opencv.hpp>
#include <iostream>
#include<time.h>
#include<math.h>
#include <iostream>
#include <set>
using namespace cv;
using namespace std;
RNG rng(12345);
float getDistance(CvPoint pointO, CvPoint pointA);
float getAngle(CvPoint pointM, CvPoint pointL, CvPoint pointR);
int main()
{
Mat srcImage = Mat::zeros(600, 800, CV_8UC3);
Mat srcImage0 = imread("10.jpg", 0);
resize(srcImage0, srcImage, srcImage.size());
srcImage = srcImage > 200;//二值化
imshow("原图", srcImage);
//getStructuringElement函数会返回指定形状和尺寸的结构元素
Mat element = getStructuringElement(MORPH_RECT, Size(3, 3));
//morphologyEx(srcImage, srcImage, MORPH_CLOSE, element);//闭运算滤波
vector<vector<Point>> contours, RectContours;//轮廓,为点向量,新的轮廓
findContours(srcImage, contours, CV_RETR_LIST, CV_CHAIN_APPROX_NONE);//找轮廓
vector<vector<Point>> hull(contours.size());//用于存放凸包
Mat drawing(srcImage.size(), CV_8UC3, cv::Scalar(0));
int i = 0;
vector<float> length(contours.size());//用于保存每个轮廓的长度
vector<float> Area_contours(contours.size()), Area_hull(contours.size()), Rectangularity(contours.size()), circularity(contours.size());
for (i = 0; i < contours.size(); i++)
{//把所有的轮廓画出来
Scalar color = Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));
length[i] = arcLength(contours[i], true);//轮廓的长度
if (length[i] >200 && length[i] <2000)
{//通过长度匹配滤除小轮廓
convexHull(Mat(contours[i]), hull[i], false);//把凸包找出来,寻找凸包函数
Area_contours[i] = contourArea(contours[i]); //轮廓面积
Area_hull[i] = contourArea(hull[i]); //凸包面积
Rectangularity[i] = Area_contours[i] / Area_hull[i]; //矩形度
circularity[i] = (4 * 3.1415*Area_contours[i]) / (length[i] * length[i]);//圆形度
if (Rectangularity[i]>0.9&&circularity[i]<0.7)
{//通过矩形度和圆形度滤除数字
//drawContours(drawing, contours, i, Scalar(255, 255, 255), 1);
RectContours.push_back(hull[i]);//把提取出来的方框导入到新的轮廓组
drawContours(drawing, hull, i, color, 1);//得到方框
}
}
}
float distance = 0, distanceMax = 0;
Point connorPoint1, connorPoint2, connorPoint3, connorPoint4;
int j = 0, k = 0;
vector<float>Theta(30);
vector<Point>ConnorPoint(4);
for (k = 0; k < RectContours.size(); k++)
{//历遍每个轮廓找角点
j = 0;
for (i = 0; i < RectContours[k].size(); i++)
{//历遍当个轮廓各点间夹角
if (i == 0)
{
Theta[i] = getAngle(RectContours[k][i], RectContours[k][RectContours[k].size() - 1], RectContours[k][i + 1]);
}
else if (i == RectContours[k].size() - 1)
{
Theta[i] = getAngle(RectContours[k][i], RectContours[k][i - 1], RectContours[k][0]);
}
else
{
Theta[i] = getAngle(RectContours[k][i], RectContours[k][i - 1], RectContours[k][i + 1]);
}
if (Theta[i] / 3.1415 * 180 < 170)
{//两点间夹角小于170度
if (getDistance(RectContours[k][i], ConnorPoint[0])>10 && getDistance(RectContours[k][i], ConnorPoint[1])>10
&& getDistance(RectContours[k][i], ConnorPoint[2])>10 && getDistance(RectContours[k][i], ConnorPoint[3])>10)
{//新找到的角点与已经保存的角点间距离要大于10
ConnorPoint[j] = RectContours[k][i]; //四个角点
// circle(drawing, RectContours[k][i], 3, Scalar(255, 255, 255), FILLED, LINE_AA);
circle(drawing, ConnorPoint[j], 3, Scalar(255, 255, 255), FILLED, LINE_AA);
//每个四边形的角点显示逻辑这里还是有些问题
cout << "\n轮廓 " << j << " 的四个角点坐标分别为:\n" << ConnorPoint[0] << ConnorPoint[1] << ConnorPoint[2] << ConnorPoint[3] << endl;
j++;
}
}
}
}
for (int i = 0; i < ConnorPoint.size(); i++)
{
cout << "\n\t\t毛哥好\n" << endl;
}
imshow("轮廓", drawing);
/********透视变换过程*************************************************************************/
检测是否是四边形,很多图片检测不到
// if (approx.size() != 4)
// {
// std::cout << "The object is not quadrilateral(四边形)!" << std::endl;
// return -1;
// }
// //get mass center 寻找四边形中点
// for (unsigned int i = 0; i < corners.size(); i++)
// {
// center += corners[i];
// }
// center *= (1. / corners.size());
//
// //确定四个点的中心线
// sortCorners(corners, center);
//
// cv::Mat dst = src.clone();
//
// //Draw Lines 画直线
// for (unsigned int i = 0; i<lines.size(); i++)
// {
// cv::Vec4i v = lines[i];
// cv::line(dst, cv::Point(v[0], v[1]), cv::Point(v[2], v[3]), CV_RGB(0, 255, 0)); //目标版块画绿线
// }
//
// //draw corner points 画角点
// cv::circle(dst, corners[0], 3, CV_RGB(255, 0, 0), 2);
// cv::circle(dst, corners[1], 3, CV_RGB(0, 255, 0), 2);
// cv::circle(dst, corners[2], 3, CV_RGB(0, 0, 255), 2);
// cv::circle(dst, corners[3], 3, CV_RGB(255, 255, 255), 2);
//
// //draw mass center 画出四边形中点
// cv::circle(dst, center, 3, CV_RGB(255, 255, 0), 2);
//
// cv::Mat quad = cv::Mat::zeros(300, 220, CV_8UC3);//设定校正过的图片从320*240变为300*220
//
// //corners of the destination image
// std::vector<cv::Point2f> quad_pts;
// quad_pts.push_back(cv::Point2f(0, 0));
// quad_pts.push_back(cv::Point2f(quad.cols, 0));//(220,0)
// quad_pts.push_back(cv::Point2f(quad.cols, quad.rows));//(220,300)
// quad_pts.push_back(cv::Point2f(0, quad.rows));
//
// // Get transformation matrix
// cv::Mat transmtx = cv::getPerspectiveTransform(corners, quad_pts); //求源坐标系(已畸变的)与目标坐标系的转换矩阵
//
// // Apply perspective transformation透视转换
// cv::warpPerspective(src, quad, transmtx, quad.size());
// cv::namedWindow("image", 0);
// cv::imshow("image", dst);
//
// cv::namedWindow("quadrilateral", 0);
// cv::imshow("quadrilateral", quad);
waitKey(0);
return 0;
}
float getDistance(CvPoint pointO, CvPoint pointA)
{//求两点之间距离
float distance;
distance = powf((pointO.x - pointA.x), 2) + powf((pointO.y - pointA.y), 2);
distance = sqrtf(distance);
return distance;
}
float getAngle(CvPoint pointM, CvPoint pointL, CvPoint pointR)
{//求三点之间的夹角
CvPoint L, R;
float dist_L, dist_R, Theta;
L.x = pointL.x - pointM.x;
L.y = pointL.y - pointM.y;
R.x = pointR.x - pointM.x;
R.y = pointR.y - pointM.y;
dist_L = getDistance(pointL, pointM);
dist_R = getDistance(pointR, pointM);
Theta = acos((L.x*R.x + L.y*R.y) / (dist_L*dist_R));
return Theta;
}


















 7559
7559

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











