









Agv、Rgv 车辆控制调度系统开发第七篇-选车算法
前言
我说过10期讲完调度,就一定会更新完,大家也不要再催更了,我会在有时间的时候更新,
这期讲一下选车算法,为什么选车也叫算法,因为现场运行的好坏选车起到了绝对作用,选择一辆对的车,车将少走很多弯路,大幅提升运送效率。
一、选车算法
选车算法的核心思想就是让车走最少的距离,为了走最少的距离这里面真的用到了算法。
这些年我一共实现了两套选车算法,第一套主要应用于车间场景50台一下。
第二种主要应用于仓储场景,台数不限制。
这两种算法各有优缺点
二、分别讲解
1.基于最短路线的选车算法
基于最短路线的,实际上也就是使用的最短路线算法,这一版算法的优点就是选择的车距离绝对是最短的,缺点就是对车辆数量有要求,测试发现50台是极限。
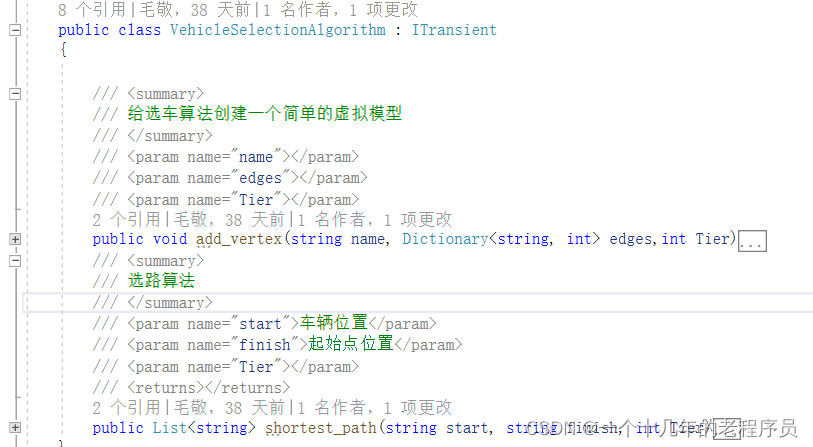
算法用的就是标准的最短路线算法,最难的是选车模型的创建,我把选车模型的代码贴在下面供大家参考。
这一版算法已经经过现场验证
/// <summary>
/// 给选车算法创建一个简单的虚拟模型
/// </summary>
/// <param name="name"></param>
/// <param name="edges"></param>
/// <param name="Tier"></param>
public void add_vertex(string name, Dictionary<string, int> edges,int Tier)
{
bool i = false;
if (!DispatchData.Vertices.ContainsKey(Tier))
{
DispatchData.Vertices.Add(Tier, null);
}
foreach (var v in DispatchData.Vertices)
{
if(v.Key== Tier)
{
if (v.Value == null)
{
continue;
}
foreach (var item in v.Value)
{
if (item.Key == name)
{
foreach (var t in edges)
{
DispatchData.Vertices[Tier][name].Add(t.Key, t.Value);
}
i = true;
}
}
}
}
if (i == false)
{
if (DispatchData.Vertices[Tier] == null)
{
var c = new Dictionary<string, Dictionary<string, int>>();
c.Add(name, null);
DispatchData.Vertices[Tier]=c;
}
DispatchData.Vertices[Tier][name] = edges;
}
}
2.基于递归算法 的选车算法
第二版算法本质上就是递归算法,这个算法的缺点就是选择的车是相对距离比较近的,不是绝对近的,优点就是对车辆数量没有要求,写到这里突然想到为什么不结合起来用不就完美了吗?哈哈
总结
其实我把调度的核心思想和创作方式都分享了,只是没分享源码,其实即使我分析源码大家也看不懂,
即使看懂了也没有用,像调度这种系统代码量真的不多,但是代码质量真的高,其实我的学历不高只有小学,为了写好调度,我分别学习了高等数据线微积分,向量,几何学等,其实做这种系统上过大学的有绝对优势。

系列文章链接
Agv、Rgv 车辆控制调度系统开发第一篇
Agv、Rgv 车辆控制调度系统开发第二篇
Agv、Rgv 车辆控制调度系统开发第三篇
Agv、Rgv 车辆控制调度系统开发第四篇
Agv、Rgv 车辆控制调度系统开发第五篇-避碰
Agv、Rgv 车辆控制调度系统开发第六篇-流程控制器
Agv、Rgv 车辆控制调度系统开发第七篇-选车算法
Agv、Rgv 车辆控制调度系统开发第八篇-错误纠正
Agv、Rgv 车辆控制调度系统开发第9篇-性能测试
Agv车辆控制调度系统开发第十篇-终结篇
其他文章
调度系统核心算法第一篇-交通管制
agv车辆调度系统-技术篇
agv调度系统3.0技术介绍
调度算法研究交流群的建立-欢迎加群交流
Agv、Rgv 车辆控制调度系统开发知识点篇

















 178
178

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









