







一、问题描述
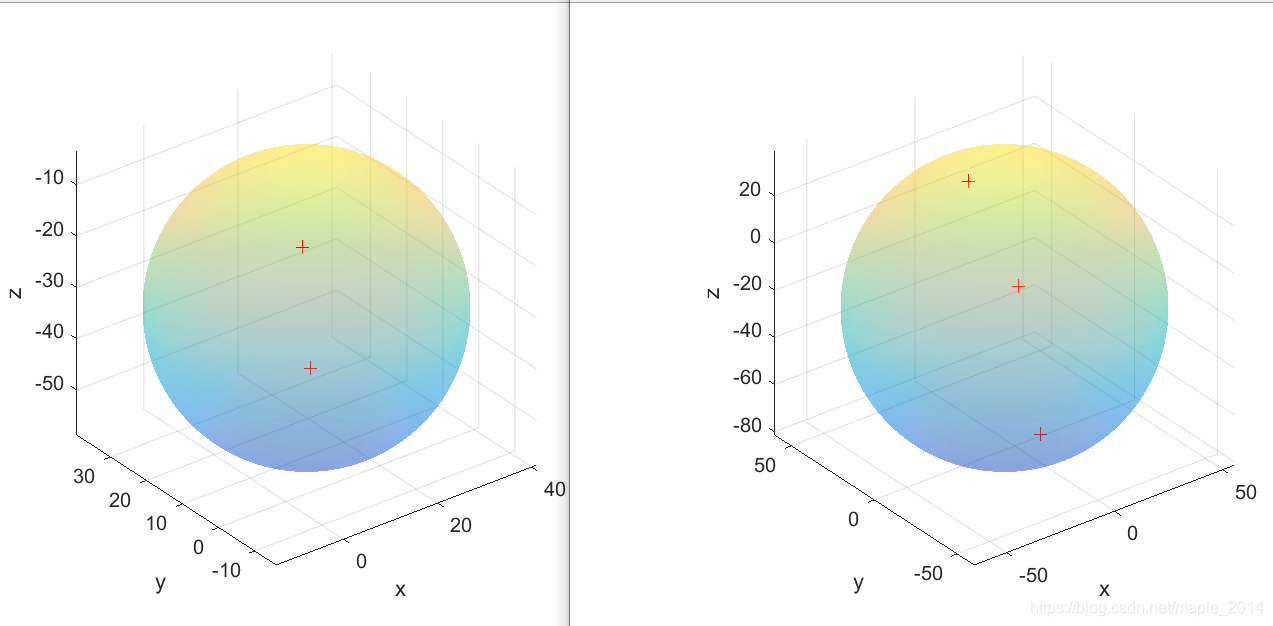
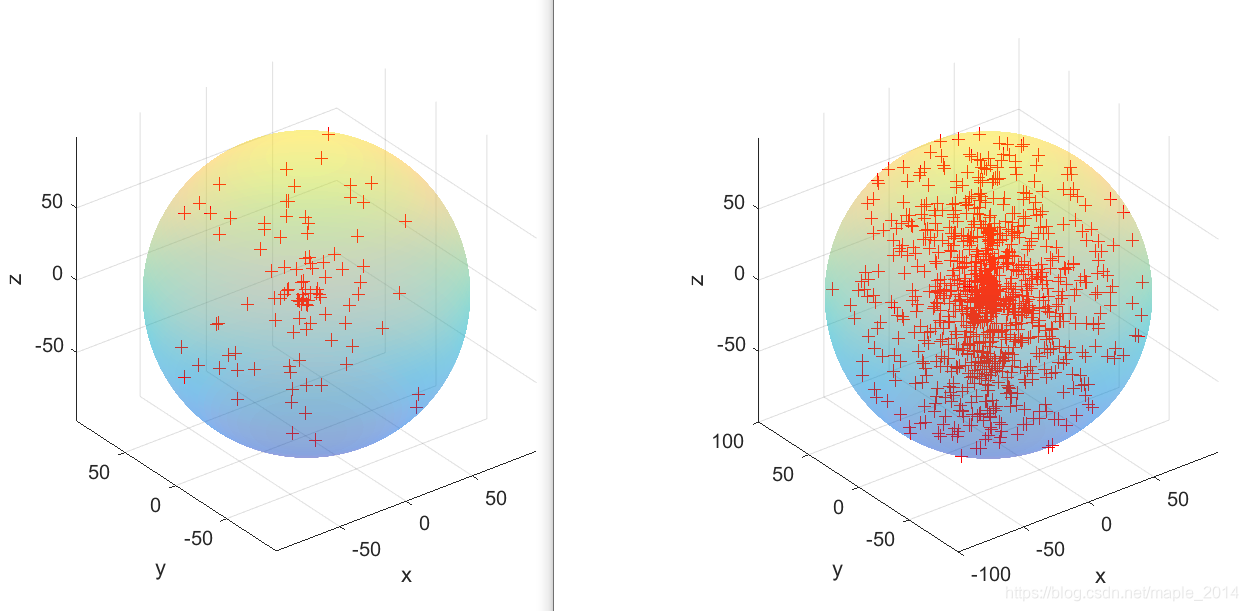
给定空间 n n n个点,计算最小包围球,使得所有给定点均在球面以内(包括在球面上)。
二、算法步骤
最小包围球算法可以在最小覆盖圆算法的基础上修改得到:(1)将平面不共线三点确定一个圆的算法改成空间不共线三点确定一个圆的算法(详见博文:空间圆弧路径参数化);(2)增加一个内循环,计算空间不共面四点确定一个球面的算法(详见博文:任意四面体的外接球/三维空间不共面四点确定唯一球面)。
三、MATLAB代码
%{
Function: draw_sphere
Description: 画球面
Input: 球心sphereCenter,球半径radius
Output: 无
Author: Marc Pony(marc_pony@163.com)
%}
function draw_sphere(sphereCenter, radius)
[x,y,z] = sphere(200);
x = x * radius + sphereCenter(1);
y = y * radius + sphereCenter(2);
z = z * radius + sphereCenter(3);
h = surf(x, y, z);
xlabel('x')
ylabel('y')
zlabel('z')
set(h, 'FaceAlpha', 0.3, 'MarkerEdgeColor', 'none')
shading interp
end
%{
Function: get_circle_center_3D
Description: 求空间三点确定的圆周的圆心
Input: 空间三个点a,b,c
Output: 空间圆周圆心center
Author: Marc Pony(marc_pony@163.com)
%}
function center = get_circle_center_3D(a, b, c)
x1 = a(1);
y1 = a(2);
z1 = a(3);
x2 = b(1);
y2 = b(2);
z2 = b(3);
x3 = c(1);
y3 = c(2);
z3 = c(3);
x4 = 0.5 * (x1 + x2);
y4 = 0.5 * (y1 + y2);
z4 = 0.5 * (z1 + z2);
x5 = 0.5 * (x2 + x3);
y5 = 0.5 * (y2 + y3);
z5 = 0.5 * (z2 + z3);
a11 = x2 - x1;
a12 = y2 - y1;
a13 = z2 - z1;
b1 = x4 * a11 + y4 * a12 + z4 * a13;
a21 = x3 - x2;
a22 = y3 - y2;
a23 = z3 - z2;
b2 = x5 * a21 + y5 * a22 + z5 * a23;
a31 = (y1 - y2) * (z2 - z3) - (y2 - y3) * (z1 - z2);
a32 = (x2 - x3) * (z1 - z2) - (x1 - x2) * (z2 - z3);
a33 = (x1 - x2) * (y2 - y3) - (x2 - x3) * (y1 - y2);
b3 = x3 * a31 + y3 * a32 + z3 * a33;
center = zeros(3, 1);
temp = a11 * (a22 * a33 - a23 * a32) + a12 * (a23 * a31 - a21 * a33) + a13 * (a21 * a32 - a22 * a31);
center(1) = ((a12 * a23 - a13 * a22) * b3 + (a13 * a32 - a12 * a33) * b2 + (a22 * a33 - a23 * a32) * b1) / temp;
center(2) = -((a11 * a23 - a13 * a21) * b3 + (a13 * a31 - a11 * a33) * b2 + (a21 * a33 - a23 * a31) * b1) / temp;
center(3) = ((a11 * a22 - a12 * a21) * b3 + (a12 * a31 - a11 * a32) * b2 + (a21 * a32 - a22 * a31) * b1) / temp;
end
%{
Function: get_distance_square_3D
Description: 求空间两点之间距离的平方
Input: 空间两点a,b
Output: 空间两点之间距离的平方
Author: Marc Pony(marc_pony@163.com)
%}
function distanceSquare = get_distance_square_3D(a, b)
distanceSquare = (a(1) - b(1))^2 + (a(2) - b(2))^2 + (a(3) - b(3))^2;
end
%{
Function: get_sign
Description: 求实数x的符号
Input: 实数x
Output: 实数x的符号y
Author: Marc Pony(marc_pony@163.com)
%}
function y = get_sign(x)
if abs(x) < 1.0e-8
y = 0;
else
if x < 0.0
y = -1;
else
y = 1;
end
end
end
%{
Function: get_sphere_center
Description: 求四面体外接球的球心
Input: 空间不共面四个点A,B,C,D
Output: 球面球心sphereCenter
Author: Marc Pony(marc_pony@163.com)
%}
function sphereCenter = get_sphere_center(A, B, C, D)
x1 = A(1);
y1 = A(2);
z1 = A(3);
x2 = B(1);
y2 = B(2);
z2 = B(3);
x3 = C(1);
y3 = C(2);
z3 = C(3);
x4 = D(1);
y4 = D(2);
z4 = D(3);
a11 = x2 - x1;
a12 = y2 - y1;
a13 = z2 - z1;
b1 = 0.5 * ((x2 - x1) * (x2 + x1) + (y2 - y1) * (y2 + y1) + (z2 - z1) * (z2 + z1));
a21 = x3 - x1;
a22 = y3 - y1;
a23 = z3 - z1;
b2 = 0.5 * ((x3 - x1) * (x3 + x1) + (y3 - y1) * (y3 + y1) + (z3 - z1) * (z3 + z1));
a31 = x4 - x1;
a32 = y4 - y1;
a33 = z4 - z1;
b3 = 0.5 * ((x4 - x1) * (x4 + x1) + (y4 - y1) * (y4 + y1) + (z4 - z1) * (z4 + z1));
temp = a11 * (a22 * a33 - a23 * a32) + a12 * (a23 * a31 - a21 * a33) + a13 * (a21 * a32 - a22 * a31);
x0 = ((a12 * a23 - a13 * a22) * b3 + (a13 * a32 - a12 * a33) * b2 + (a22 * a33 - a23 * a32) * b1) / temp;
y0 = -((a11 * a23 - a13 * a21) * b3 + (a13 * a31 - a11 * a33) * b2 + (a21 * a33 - a23 * a31) * b1) / temp;
z0 = ((a11 * a22 - a12 * a21) * b3 + (a12 * a31 - a11 * a32) * b2 + (a21 * a32 - a22 * a31) * b1) / temp;
sphereCenter = [x0; y0; z0];
end
%{
Function: min_enclosing_sphere
Description: 求三维空间pointCount个点的最小包围球
Input: 空间pointCount个点的坐标(x,y,z),点个数pointCount
Output: 空间pointCount个点的最小包围球球心sphereCenter,半径radius
Author: Marc Pony(marc_pony@163.com)
%}
function [sphereCenter, radius] = min_enclosing_sphere(x, y, z, pointCount)
p = [x(:)'; y(:)'; z(:)'];
p = p(:, randperm(pointCount)); %随机打乱数据
sphereCenter = p(:, 1);
radiusSquare = 0.0;
for i = 2 : pointCount
if get_sign(get_distance_square_3D(p(:, i), sphereCenter) - radiusSquare) > 0
sphereCenter = p(:, i);
radiusSquare = 0.0;
for j = 1 : i
if get_sign(get_distance_square_3D(p(:, j), sphereCenter) - radiusSquare) > 0
sphereCenter = 0.5 * (p(:, i) + p(:, j));
radiusSquare = get_distance_square_3D(p(:, j), sphereCenter);
for k = 1 : j
if get_sign(get_distance_square_3D(p(:, k), sphereCenter) - radiusSquare) > 0
sphereCenter = get_circle_center_3D(p(:, i), p(:, j), p(:, k));
radiusSquare = get_distance_square_3D(p(:, i), sphereCenter);
for m = 1 : k
if get_sign(get_distance_square_3D(p(:, m), sphereCenter) - radiusSquare) > 0
sphereCenter = get_sphere_center(p(:, i), p(:, j), p(:, k), p(:, m));
radiusSquare = get_distance_square_3D(p(:, i), sphereCenter);
end
end
end
end
end
end
end
end
radius = sqrt(radiusSquare);
end
clc
clear
close all
for pointCount = [2, 3, 100, 1000]
phi = pi * rand(pointCount, 1);
theta = 2 * pi * rand(pointCount, 1);
R = 100 * rand(pointCount, 1);
x = R .* sin(phi) .* cos(theta);
y = R .* sin(phi) .* sin(theta);
z = R .* cos(phi);
[sphereCenter, radius] = min_enclosing_sphere(x, y, z, pointCount);
figure('color', 'w')
draw_sphere(sphereCenter, radius)
hold on
plot3(x, y, z, 'r+')
axis equal tight
if sum(sqrt((x - sphereCenter(1)).^2 + (y - sphereCenter(2)).^2 + (z - sphereCenter(3)).^2) > radius + 0.0001) > 0
disp('至少有一个点在球面以外')
end
end

















 2937
2937

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









