







文章目录
一、问题描述
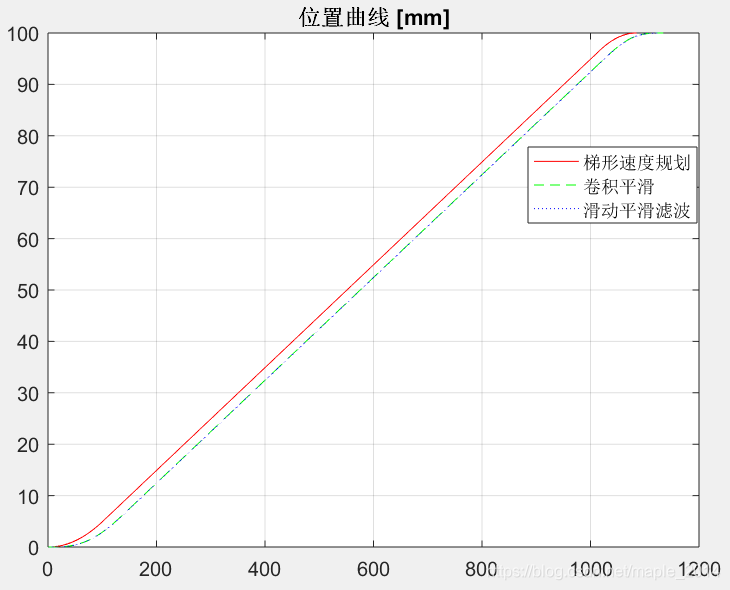
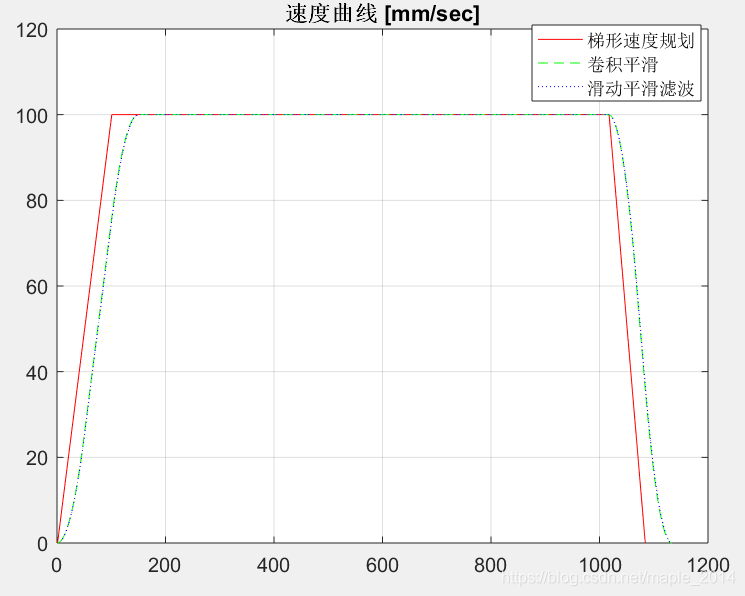
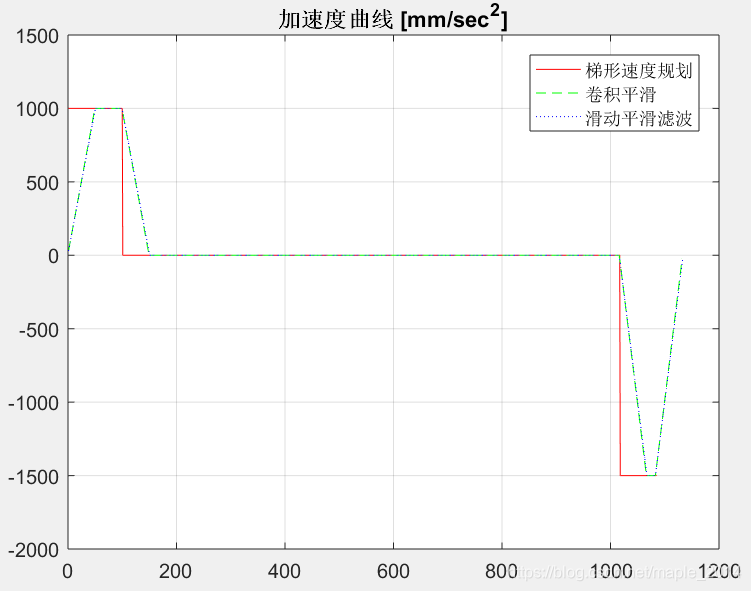
梯形速度规划是最快也是最简单的速度规划方法。由于其速度连续但不平滑,加速度可控但会跳变,加加速度不可控,通常会引起受控对象震动,控制效果较差。S形速度规划由于其速度连续且平滑,加速度可控且连续,加加速度可控,控制效果好,广泛用于工业现场。但是,S形速度规划算法较复杂,在某些条件下,需要迭代计算进行规划,计算时间稍长。那么,有没有这样的方法:采用简单的梯形速度规划方法得到位置曲线,再通过一些方法,生成平滑的S形位置曲线?有的!本文提供了两种方法,效果如下:
二、MATLAB代码
计算两列数据的卷积:
%{
Function: my_conv
Description: 计算两列数据的卷积
Input: 数据列u,数据列v
Output: 数据列w
Author: Marc Pony(marc_pony@163.com)
Date: 2020.04.06
%}
function w = my_conv(u, v)
m = length(u);
n = length(v);
count = m + n - 1;
w = zeros(count, 1);
for k = 1 : count
w(k) = 0.0;
startIndex = max([1, k - n + 1]);
endIndex = min([k, m]);
for j = startIndex : endIndex
w(k) = w(k) + u(j) * v(k - j + 1);
end
end
end
梯形速度规划:
%{
Function: trapezoidal_velocity_planning
Description: 梯形速度规划
Input: 运动参数motionParams
Output: 规划好了的运动参数motionParams,状态变量sta(1表示成功,0表示失败)
Author: Marc Pony(marc_pony@163.com)
Date: 2020.04.06
%}
function [motionParams, sta] = trapezoidal_velocity_planning(motionParams)
sta = 1;
if (motionParams.vs < motionParams.ve)
if (motionParams.L + eps < (motionParams.ve * motionParams.ve - motionParams.vs * motionParams.vs) / (2.0 * motionParams.acc))
sta = 0;
return;
end
elseif (motionParams.vs > motionParams.ve)
if (motionParams.L + eps < (motionParams.vs * motionParams.vs - motionParams.ve * motionParams.ve) / (2.0 * motionParams.dec))
sta = 0;
return;
end
else
%to do nothing
end
motionParams.vm = sqrt((2.0 * motionParams.acc * motionParams.dec * motionParams.L + motionParams.dec * motionParams.vs * motionParams.vs + motionParams.acc * motionParams.ve * motionParams.ve) / (motionParams.acc + motionParams.dec));
if (motionParams.vm > motionParams.vc)
motionParams.vm = motionParams.vc;
end
motionParams.T1 = (motionParams.vm - motionParams.vs) / motionParams.acc;
motionParams.T3 = (motionParams.vm - motionParams.ve) / motionParams.dec;
motionParams.L1 = 0.5 * (motionParams.vm + motionParams.vs) * motionParams.T1;
motionParams.L3 = 0.5 * (motionParams.vm + motionParams.ve) * motionParams.T3;
motionParams.L2 = motionParams.L - motionParams.L1 - motionParams.L3;
motionParams.T2 = motionParams.L2 / motionParams.vm;
motionParams.t1 = motionParams.T1;
motionParams.t2 = motionParams.t1 + motionParams.T2;
motionParams.t3 = motionParams.t2 + motionParams.T3;
motionParams.totalT = motionParams.t3;
motionParams.s1 = motionParams.L1;
motionParams.s2 = motionParams.s1 + motionParams.L2;
motionParams.s3 = motionParams.s2 + motionParams.L3;
end
梯形速度规划的主轴插补:
%{
Function: main_axis_interpolation_for_trapezoidal_velocity
Description: 梯形速度规划的主轴插补
Input: 已经规划好了的运动参数motionParams
Output: 主轴位置pos(mm)、主轴速度vel(mm/s)、主轴加速度acc(mm/s^2)
Author: Marc Pony(marc_pony@163.com)
Date: 2020.04.06
%}
function [pos, vel, acc] = main_axis_interpolation_for_trapezoidal_velocity(motionParams)
if (motionParams.t < motionParams.t1)
pos = motionParams.vs * motionParams.t + 0.5 * motionParams.acc * motionParams.t * motionParams.t;
vel = motionParams.vs + motionParams.acc * motionParams.t;
acc = motionParams.acc;
elseif (motionParams.t < motionParams.t2)
pos = motionParams.L1 + (motionParams.t - motionParams.t1) * motionParams.vm;
vel = motionParams.vm;
acc = 0.0;
elseif (motionParams.t < motionParams.t3)
pos = motionParams.L1 + motionParams.L2 + motionParams.vm * (motionParams.t - motionParams.t2) - 0.5 * motionParams.dec * (motionParams.t - motionParams.t2) * (motionParams.t - motionParams.t2);
vel = motionParams.vm - motionParams.dec *(motionParams.t - motionParams.t2);
acc = -motionParams.dec;
else
motionParams.t = motionParams.totalT;
pos = motionParams.L;
vel = motionParams.ve;
acc = -motionParams.dec;
end
end
采用梯形速度规划生成S形速度曲线(卷积平滑方法和滑动平滑滤波方法):
clc;
clear;
close all;
%% 输入参数
motionParams = struct();
motionParams.dt = 0.001; %s
motionParams.L = 100; %mm
motionParams.vs = 0; %mm/s
motionParams.ve = 0; %mm/s
motionParams.vc = 100; %mm/s
motionParams.acc = 1000; %mm/s^2
motionParams.dec = 1500; %mm/s^2
smoothFactor = 50; %平滑因子,用于衡量加加速度,非负整数,时间增加smoothFactor*插补周期
%% 梯形速度规划
[motionParams, sta] = trapezoidal_velocity_planning(motionParams);
if sta == 0
error('当前运动参数下无法规划!');
end
%% 梯形速度插补
count = ceil(motionParams.totalT / motionParams.dt) + 1;
time = zeros(count, 1);
pos = zeros(count, 1);
vel = zeros(count, 1);
acc = zeros(count, 1);
vel(1) = motionParams.vs;
acc(1) = motionParams.acc;
motionParams.t = 0.0;
for i = 2 : count
motionParams.t = motionParams.t + motionParams.dt;
[pos(i), vel(i), acc(i)] = main_axis_interpolation_for_trapezoidal_velocity(motionParams);
time(i) = motionParams.t;
end
%% 方法1:卷积平滑
newPos1 = [pos ; ones(smoothFactor, 1) * pos(end)];
temp = ones(smoothFactor, 1) / smoothFactor;
smoothNewPos1 = my_conv(newPos1, temp);
smoothNewPos1 = smoothNewPos1(1 : length(newPos1));
smoothNewVel1 = diff(smoothNewPos1) / motionParams.dt;
smoothNewAcc1 = diff(smoothNewVel1) / motionParams.dt;
%% 方法2:滑动平滑滤波
newPos2 = [ones(smoothFactor, 1) * pos(1); pos; ones(smoothFactor, 1) * pos(end)];
count = length(pos) + smoothFactor;
smoothNewPos2 = zeros(count, 1);
for i = 1 : count
smoothNewPos2(i) = mean(newPos2(i : i + smoothFactor));
end
smoothNewVel2 = diff(smoothNewPos2) / motionParams.dt;
smoothNewAcc2 = diff(smoothNewVel2) / motionParams.dt;
%% 绘图验证结果
figure(1);
plot(pos, 'r');
hold on
plot(smoothNewPos1, 'g--');
plot(smoothNewPos2, 'b:');
legend('梯形速度规划', '卷积平滑', '滑动平滑滤波')
grid;
title('位置曲线 [mm]');
figure(2);
plot(vel, 'r');
hold on
plot(smoothNewVel1, 'g--');
plot(smoothNewVel2, 'b:');
legend('梯形速度规划', '卷积平滑', '滑动平滑滤波')
grid;
title('速度曲线 [mm/sec]');
figure(3);
plot(acc, 'r');
hold on
plot(smoothNewAcc1, 'g--');
plot(smoothNewAcc2, 'b:');
legend('梯形速度规划', '卷积平滑', '滑动平滑滤波')
grid;
title('加速度曲线 [mm/sec^2]');
三、总结
采用梯形速度规划,采用卷积平滑方法和滑动平滑滤波方法均可以很容易生成S形速度曲线。卷积平滑方法不适用于在线插补,滑动平滑滤波方法则适用。两种方法有个缺点是:不适用于起始速度vs和结束速度ve不为0的情况。














 3796
3796











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









