







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
从毫米波雷达技术和汽车自动驾驶的现状出发,总结了毫米波雷达在汽车自动驾驶中的应用现状,展望了发展趋势,分析了关键技术,以期为该行业相关人员提供参考.
⛄ 部分代码
%Assignment - 1 and 2
close all
clear all
clc
load Assignment2.mat
% Collections in the form of [sensor X fast-time]
c=299792458; %speed of light
%% Start writing your code ....
%Invoke names according to assignment 1 or 2
%name = ["CollectionA", "CollectionB", "CollectionC", "CollectionD"];
name = ["BS_TCR_0_10", "BS_TCR_0_15", "BS_TCR_0_20", "BS_TCR_0_5"];
NFFTA = 1024; % FFT length angle
NFFTR = 1024; % FFT length range
% Range axis
Ts = Radar_settings.Chirp_time - Radar_settings.Reset_time - Radar_settings.DwellTime; % Duration of the ramp section of the chirp in s (Sweep Time)
S = Radar_settings.BW/Ts;
Range = c/(2*S)*linspace(0,Radar_settings.Fs,NFFTR); % in meters
%Number of sensors
N = 12;
%Distance between the sensors
d = 2*c/Radar_settings.Fc;
rangeRes_Theory = c/(2*Radar_settings.BW);
for ind = 1:size(name, 2)
data_to_process= eval(name(ind)); %change to CollectionB, CollectionC and CollectionD
NSamp = size(data_to_process,2);
%Zero padding the data, 1st dim to improve the fft
zero_matrix = zeros([3000-size(data_to_process, 1), size(data_to_process, 2)]);
%vertical concatenarion of the data
zero_padded_data = [data_to_process; zero_matrix];
%Doing 2D fft of the data will give me range/angle data
FFT = fft2(zero_padded_data);
%Shifting the FFT, to get the stationary data in the middle,
FFT_Shift = fftshift(FFT, 1);
%Defining angle, same dim as that of zero padded matrix
AoA = linspace(-90, 90, 3000);
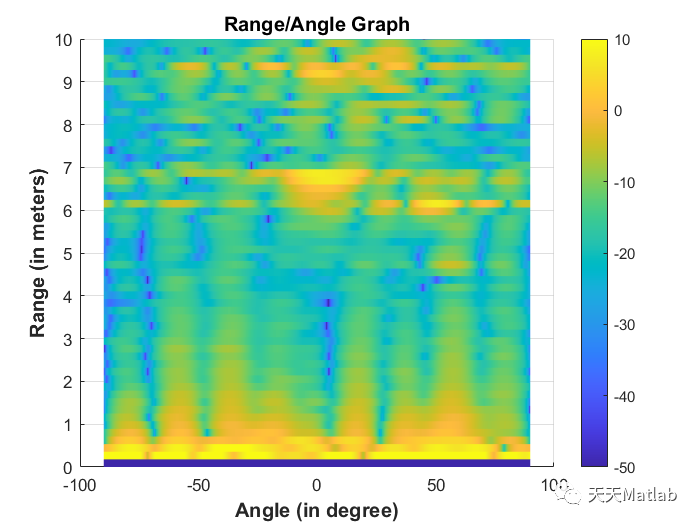
%Plotting the data, Surface plot
figure();
surf(AoA, Range, db(abs(FFT_Shift)).'); view(2); shading flat;
ylim([0 10]);
%Taking first 15 meters in the range data
%other wise the graph goes till 182 m
xlabel('Angle (in degree)', 'FontSize', 12, 'FontWeight', 'bold');
ylabel('Range (in meters)', 'FontSize', 12, 'FontWeight', 'bold');
title('Range/Angle Graph', 'FontSize',12, 'FontWeight', 'bold');
grid on;
colorbar;
caxis([-50 10]);
%Ploting data in polar coordinates, used pudn.com's polarPcolor.m
%Taking till R = 15m belyond that the data is mostly zero
figure();
[h, c]=polarPcolor(Range(:, 1:58),AoA, db(abs(FFT_Shift(:, 1:58))).');
colorbar;
caxis([-50 10]);
%Range cuts to find the range resolution Broadside
figure();
plot(Range(:,1:58), db(abs(FFT_Shift(size(AoA,2)/2+1,1:58))).', 'LineWidth', 1.5);
xlabel('Range (in m)');
ylabel('Angle/Range data (in dB)');
title('Range cut for AoA = 0 deg');
ylim([-30, 30]);
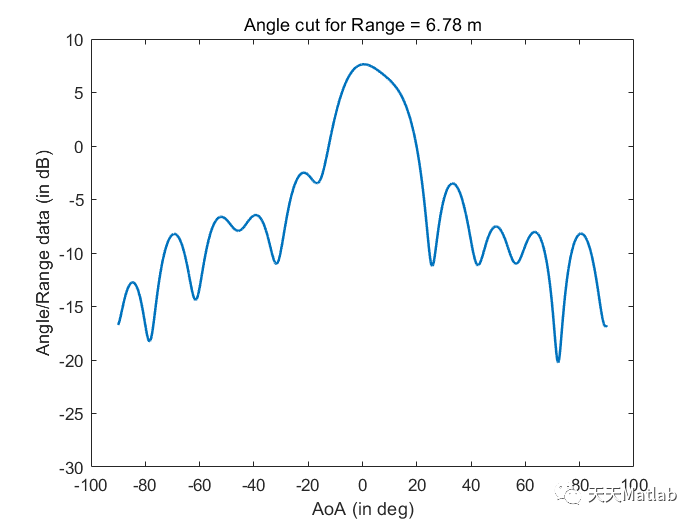
%Angle cut to find the angle resolution R = 10 m
figure();
plot(AoA(1,:), db(abs(FFT_Shift(:,39))).', 'LineWidth', 1.5);
xlabel('AoA (in deg)');
ylabel('Angle/Range data (in dB)');
title('Angle cut for Range = 6.78 m');
ylim([-30, 10]);
end
⛄ 运行结果


⛄ 参考文献
[1] 刘敏. 基于自动驾驶车载毫米波雷达间相互干扰的研究[D]. 重庆理工大学.
[2] 李赵, 刘心刚, 袁瑞廷,等. 一种基于毫米波雷达的自动驾驶车辆定位方法:, CN201911237088.8[P]. 2020.
[3] 单祥茹. 自动驾驶之外,毫米波雷达还有哪些潜力可挖?[J]. 中国电子商情:基础电子, 2019(5):3.
[4] 王向荣李韦良曹先彬王向华. 基于毫米波雷达和MATLAB的手势识别实验设计[J]. 实验技术与管理, 2022, 39(11):150-155.
[5] 李赵, 刘心刚, 袁瑞廷,等. 一种基于毫米波雷达的自动驾驶车辆定位方法:, CN110888125A[P]. 2020.
[6] 朱信鹏. 基于汽车毫米波雷达的目标跟踪算法研究[D]. 沈阳理工大学.
[7] 陆叶, 陈嘟, 何剑. 毫米波雷达在汽车自动驾驶中的应用与展望[J]. 2020.
⛳️ 代码获取关注我
❤️部分理论引用网络文献,若有侵权联系博主删除
❤️ 关注我领取海量matlab电子书和数学建模资料
















 152
152











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











