







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
旋翼类无人机相对于固定翼无人机具有能够垂直起降,空中悬停等优点,而四旋翼无人机作为其中一个典型的代表,不仅结构简单还具有良好的带载能力,也易于操控,在军事领域,民用领域,都有着广泛的应用,常见的包括航天拍摄,灾害救援,物资运输等.飞行控制系统是四旋翼飞行器的关键,其中,如何控制飞行器的姿态,是整个飞行控制的核心问题.要保证四旋翼无人机在各种飞行环境下都具有良好的飞行状态,飞行控制算法极为重要.本文借助Matlab仿真平台上,使用了控制系统对四旋翼无人机进行了仿真.
⛄ 部分代码
% ******************************************************************************************************************
% ************************************ SEGUIMIENTO DE TRAYECTORIA **************************************************
% ********************************** ROBOT MANIPULADOR AEREO DOS BRAZOS *****************************************************
% ******************************************************************************************************************
%% Inicializacion
tic
clc; clear all; close all; warning off % Inicializacion
ts = 0.1;
tfin = 200;
t = 0:ts:tfin;
%% Posicion de los brazos roboticos
a_1=0;
b_1=0.18;
c_1=-0.03;
a_2=0;
b_2=-0.15;
c_2=-0.03;
%% Eslabones del brazo
l1_1 = 0.15;
l2_1 = 0.44;
l3_1 = 0.45;
l1_2 = 0.15;
l2_2 = 0.44;
l3_2 = 0.45;
%% Condiciones iniciales del robot
% UAV
xu(1) = 0;
yu(1) = 0;
zu(1) = 5;
psi(1)= 0 * (pi/180);
% Primer brazo
q1_1(1) = 0 * (pi/180);
q2_1(1) = 0 * (pi/180);
q3_1(1) = 0 * (pi/180);
% Segundo brazo
q1_2(1) = 0 * (pi/180);
q2_2(1) = 0 * (pi/180);
q3_2(1) = 0 * (pi/180);
%% Tarea deseada
%Silla de montar
%%Extremo Operativo 1
xd_2 = 1.9*cos(0.05*t)+1.75; xdp_2 = -1.9*0.05*sin(0.05*t);
yd_2 = 1.9*sin(0.05*t)+1.75; ydp_2 = 1.9*0.05*cos(0.05*t);
zd_2 = 0.2*sin(0.2*t)+2; zdp_2 = 0.2*0.2*cos(0.2*t);
%%Extremo Operativo 2
xd_1 = 1.6*cos(0.05*t)+1.75; xdp_1 = -1.6*0.05*sin(0.05*t); xdpp_1 = -1.6*0.05*0.05*cos(0.05*t);
yd_1 = 1.6*sin(0.05*t)+1.75; ydp_1 = 1.6*0.05*cos(0.05*t); ydpp_1 = -1.6*0.05*0.05*sin(0.05*t);
zd_1 = 0.2*sin(0.3*t)+2.3; zdp_1 = 0.2*0.3*cos(0.3*t);
%UAV
psid= (atan2(ydp_1,xdp_1));
psidp = (1./((ydp_1./xdp_1).^2+1)).*((ydpp_1.*xdp_1-ydp_1.*xdpp_1)./xdp_1.^2);
psidp(1)=0;
hdp = [xdp_1 ydp_1 zdp_1 xdp_2 ydp_2 zdp_2 psidp]';
%% Cinematica directa inicial de los extremos operativos
h = CDBrazo3DOF(xu(1),yu(1),zu(1),psi(1),l1_1,l2_1,l3_1,a_1,b_1,c_1,q1_1(1),q2_1(1),q3_1(1));
hx_1(1) = h(1);
hy_1(1) = h(2);
hz_1(1) = h(3);
h = CDBrazo3DOF(xu(1),yu(1),zu(1),psi(1),l1_2,l2_2,l3_2,a_2,b_2,c_2,q1_2(1),q2_2(1),q3_2(1));
hx_2(1) = h(1);
hy_2(1) = h(2);
hz_2(1) = h(3);
%******************************************************************************************************************
%***************************************** CONTROLADOR ***********************************************************
%*****************************************************************************************************************
disp('Empieza el programa')
for k=1:length(t)
tic
%% 1) LEY DE CONTROL DEL MANIPULADOR AEREO
u = Control_Jacob(l2_1,l3_1,l2_2,l3_2,a_1,b_1,a_2,b_2,q1_1(k),q2_1(k),q3_1(k),q1_2(k),q2_2(k),q3_2(k),psi(k),hx_1(k),hy_1(k),hz_1(k),hx_2(k),hy_2(k),hz_2(k),xd_1(k),yd_1(k),zd_1(k),xd_2(k),yd_2(k),zd_2(k),psid(k),xdp_1(k),ydp_1(k),zdp_1(k),xdp_2(k),ydp_2(k),zdp_2(k),psidp(k));
ul(k) = u(1);
um(k) = u(2);
un(k) = u(3);
w(k) = u(4);
qp1_1(k)= u(5);
qp2_1(k)= u(6);
qp3_1(k)= u(7);
qp1_2(k)= u(8);
qp2_2(k)= u(9);
qp3_2(k)= u(10);
%% 2) CINEMATICA DEL UAV
xu_p(k) = ul(k) * cos(psi(k)) - um(k) * sin(psi(k));
yu_p(k) = ul(k) * sin(psi(k)) + um(k) * cos(psi(k));
zu_p(k) = un(k);
%% 3) Posicion del UAV en k+1 (Integracion Euler)
xu(k+1) = xu_p(k)*ts + xu(k);
yu(k+1) = yu_p(k)*ts + yu(k);
zu(k+1) = zu_p(k)*ts + zu(k);
psi(k+1) = Angulo(w(k)*ts + psi(k));
%% 4) Posicion de las articulaciones en k+1 (Integracion Euler)
% Brazo 1
q1_1(k+1)= q1_1(k) + qp1_1(k)*ts;
q2_1(k+1)= q2_1(k) + qp2_1(k)*ts;
q3_1(k+1)= q3_1(k) + qp3_1(k)*ts;
% Brazo 2
q1_2(k+1)= q1_2(k) + qp1_2(k)*ts;
q2_2(k+1)= q2_2(k) + qp2_2(k)*ts;
q3_2(k+1)= q3_2(k) + qp3_2(k)*ts;
%% 5) Posicion de los extremo operativos
h_1 = CDBrazo3DOF(xu(k+1),yu(k+1),zu(k+1),psi(k+1),l1_1,l2_1,l3_1,a_1,b_1,c_1,q1_1(k+1),q2_1(k+1),q3_1(k+1));
hx_1(k+1) = h_1(1);
hy_1(k+1) = h_1(2);
hz_1(k+1) = h_1(3);
h_2 = CDBrazo3DOF(xu(k+1),yu(k+1),zu(k+1),psi(k+1),l1_2,l2_2,l3_2,a_2,b_2,c_2,q1_2(k+1),q2_2(k+1),q3_2(k+1));
hx_2(k+1) = h_2(1);
hy_2(k+1) = h_2(2);
hz_2(k+1) = h_2(3);
%% 6) Tiempo de Maquina
dt(k) = toc;
end
disp('Fin de los calculos')
%******************************************************************************************************************
%********************************* ANIMACION SEGUIMIENTO DE TRAYECTORIA ******************************************
%% ******************************************************************************************************************
disp('Play Animacion de Simulacion ')
figure(1)
axis equal
view(-15,15) % Angulo de vista
cameratoolbar
title ("Simulacion Cinematica")
%% Configuracion del Manipulador Aereo
DimensionesManipulador(0,l1_1,l2_1,l3_1-0.2,1);
Hexacoptero(0.05,[1 0 0]);
%% Dibujo del Manipulador Aereo
%) a) Manipulador 1
M_1=Manipulador3D(xu(1),yu(1),zu(1),psi(1),a_1,b_1,c_1,q1_1(1),q2_1(1),q3_1(1),0); % Gráfica el brazo por encima el UAV
rotate(M_1,[1 0 0],180,[xu(1),yu(1),zu(1)])
hold on
% b) Manipulador 2
M_2=Manipulador3D(xu(1),yu(1),zu(1),psi(1),a_2,b_2,c_2,q1_2(1),q2_2(1),q3_2(1),0); % Gráfica el brazo por encima el UAV
rotate(M_2,[1 0 0],180,[xu(1),yu(1),zu(1)])
hold on
% c) UAV
UAV= Hexacoptero(xu(1),yu(1),zu(1),psi(1));
%% Plot punto deseado
plot3(xd_1,yd_1,zd_1)
plot3(xd_2,yd_2,zd_2)
H1 = plot3(hx_1(1),hy_1(1),hz_1(1),'r');
H2 = plot3(hx_2(1),hy_2(1),hz_2(1),'b');
xlabel('X [m]'); ylabel('Y [m]'); zlabel('Z [m]');
%% Animacion de movimiento
for k=1:50:length(t)
tic
drawnow
delete(M_1);
delete(M_2);
delete(UAV);
delete(H1);
delete(H2);
H1 = plot3(hx_1(1:k),hy_1(1:k),hz_1(1:k),'r');
H2 = plot3(hx_2(1:k),hy_2(1:k),hz_2(1:k),'b');
% a) Manipulador 1
M_1=Manipulador3D(xu(k),yu(k),zu(k),psi(k),a_1,b_1,c_1,q1_1(k),q2_1(k),q3_1(k),0); % Gráfica el brazo por encima el UAV
rotate(M_1,[1 0 0],180,[xu(k),yu(k),zu(k)])
hold on
% b) Manipulador 2
M_2=Manipulador3D(xu(k),yu(k),zu(k),psi(k),a_2,b_2,c_2,q1_2(k),q2_2(k),q3_2(k),0); % Gráfica el brazo por encima el UAV
rotate(M_2,[1 0 0],180,[xu(k),yu(k),zu(k)])
hold on
% c) UAV
UAV= Hexacoptero(xu(k),yu(k),zu(k),psi(k));
toc
pause(0.0)
end
%%
%******************************************************************************************************************
%********************************************* GRÃ?FICAS ***********************************************************
%% ****************************************************************************************************************
% 1) Igualar columnas de los vectores creados
% hx(:,end)=[];
% hy(:,end)=[];
% hz(:,end)=[];
% psi(:,end)=[];
%%
% 2) Cálculos del Error
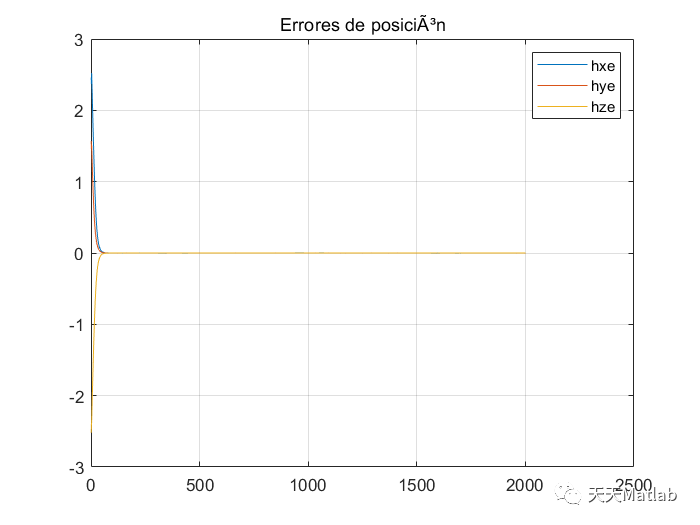
figure(2)
hxe= xd_1 - hx_1(1:end-1);
hye= yd_1 - hy_1(1:end-1);
hze= zd_1 - hz_1(1:end-1);
psie= Angulo(psid-psi(:,end-1));
plot(hxe), hold on, grid on
plot(hye)
plot(hze)
% plot(psie)
legend("hxe","hye","hze","psie")
title ("Errores de posición")
%%
% % 3) Posiciones deseadas vs posiciones reales del extremo operativo del manipulador aéreo
figure(3)
subplot(4,1,1)
plot(xd)
hold on
plot(hx)
legend("xd","hx")
ylabel('x [m]'); xlabel('s [ms]');
title ("Posiciones deseadas y reales del extremo operativo del manipulador aéreo")
subplot(4,1,2)
plot(yd)
hold on
plot(hy)
legend("yd","hy")
ylabel('y [m]'); xlabel('s [ms]');
subplot(4,1,3)
plot(zd)
hold on
plot(hz)
grid on
legend("zd","hz")
ylabel('z [m]'); xlabel('s [ms]');
subplot(4,1,4)
plot(Angulo(psid))
hold on
plot(psi)
legend("psid","psi")
ylabel('psi [rad]'); xlabel('s [ms]');
⛄ 运行结果



⛄ 参考文献
[1] 王者思, 李瑞贤, 张健,等. 基于Matlab的无人机自主飞行航迹规划与仿真[C]// 全国第二届信号处理与应用学术会议. 0.
[2] 陈平辉. 小型多旋翼无人机飞行控制器的研制[D]. 贵州大学, 2015.
[3] 魏家辉, 姜春波, 陈浩,等. 基于Matlab的四旋翼无人机控制仿真[J]. 数码世界, 2018.
⛳️ 代码获取关注我
❤️部分理论引用网络文献,若有侵权联系博主删除
❤️ 关注我领取海量matlab电子书和数学建模资料
















 2222
2222











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











