







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
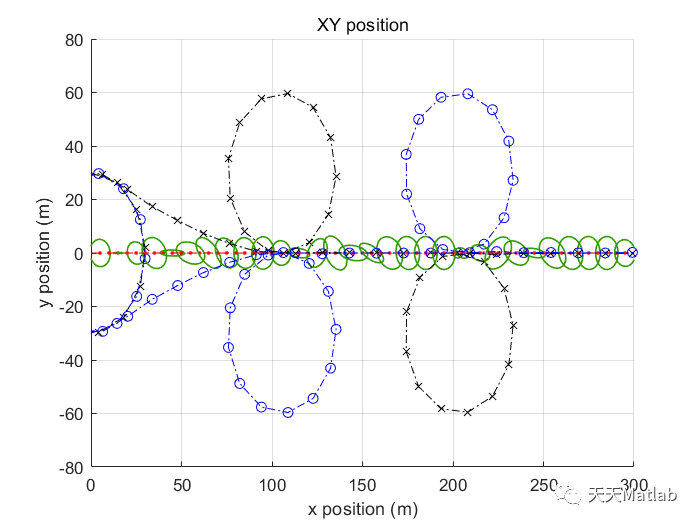
This thesis addresses a target tracking problem based on video geolocation performed by multiple Unmanned Aerial Vehicles (UAVs). Targets are ground vehicles moving at constant speed and altitude, while UAVs are modelled as Dubins vehicles, i.e. in a 2D plan, with the heading as their unique controlinput. They are flying significantly faster than their targets and do not have hovering capabilities. Thus the problem is to design a controller that allows UAVs to compute a trajectory which results in optimal target coverage over time. Two approaches are considered: a deterministic approach implementedwith the dynamic programming algorithm, and a stochastic approach implemented with both the genetic algorithm and the particle-swarm optimiser. The deterministic approach consists of an exhaustive search forward in time causing the controller to use backward induction to find the optimal controlpolicy. The stochastic approach generates an optimal solution online which results in the design of one-step ahead controllers. The outcome of this thesis consists of Matlab simulations that will compare the performances of each algorithm.
⛄ 部分代码
function output = get_theta( o, s )
% This function computes the relative angle between the sensor s and its
% target o
dx = s(1)-o(1);
dy = s(2)-o(2);
if dx~=0, output = atan(dy/dx);
elseif dx==0 && dy>0, output = pi/2;
elseif dx==0 && dy<0, output = -pi/2;
else output = 0;
end
end
⛄ 运行结果


⛄ 参考文献
⛳️ 代码获取关注我
❤️部分理论引用网络文献,若有侵权联系博主删除
❤️ 关注我领取海量matlab电子书和数学建模资料
















 174
174











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











