







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
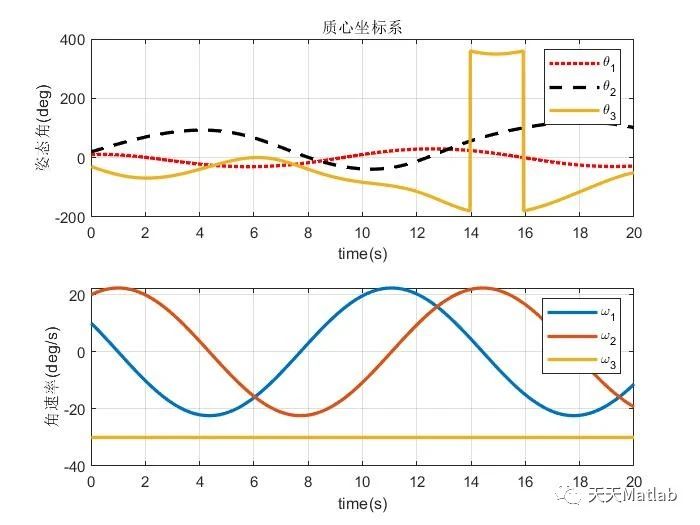
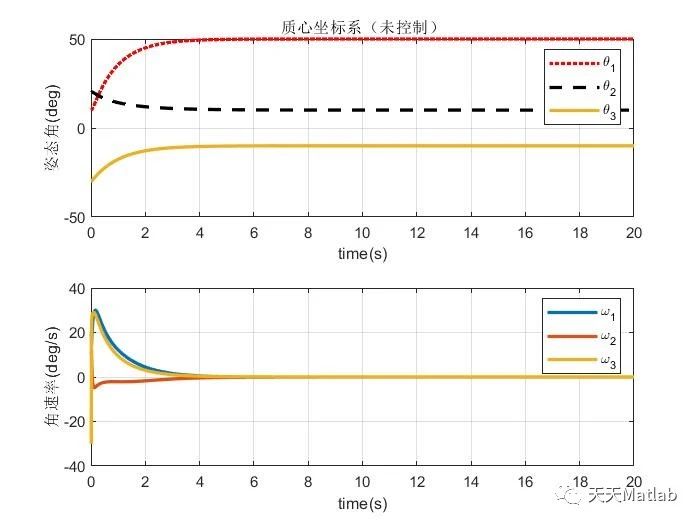
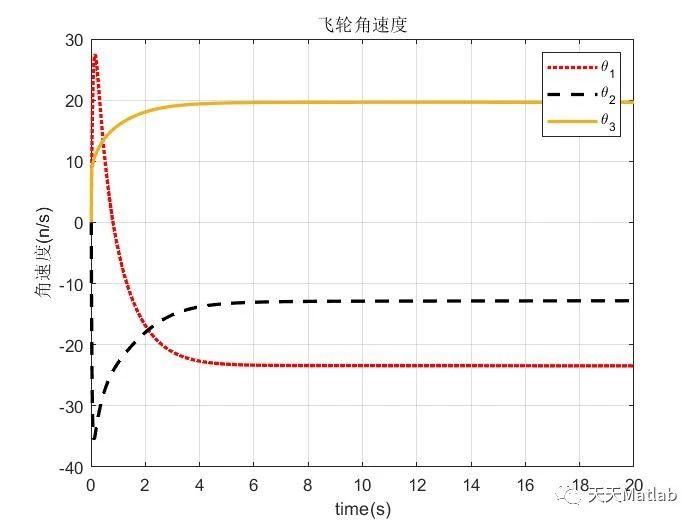
基于PID的卫星姿态控制系统是一种常用的控制算法,用于实现卫星在空间中的稳定姿态控制。PID控制器通过比较期望的姿态和实际测量的姿态,计算出控制输出,以调整卫星姿态。
以下是基于PID的卫星姿态控制系统的一般步骤:
-
姿态传感器:使用合适的传感器(如陀螺仪、加速度计、磁力计等)来测量卫星的姿态信息,如角速度、角度等。
-
设定目标姿态:确定期望的姿态,即卫星应该达到的目标状态。这可以根据任务需求和约束条件来设置。
-
姿态误差计算:将目标姿态与实际测量的姿态进行比较,计算出姿态误差。姿态误差可以表示为角度或者角速度的差异。
-
PID控制器设计:设计PID控制器来根据姿态误差产生控制输出。PID控制器由比例(Proportional)、积分(Integral)和微分(Derivative)三个部分组成。
-
比例部分(P):根据姿态误差的大小产生控制输出,用于快速响应和减小静态误差。
-
积分部分(I):根据姿态误差的累积值产生控制输出,用于消除系统的稳态误差。
-
微分部分(D):根据姿态误差变化的速率产生控制输出,用于抑制系统的振荡和提高稳定性。
-
-
控制输出计算:根据PID控制器的输出权重和姿态误差,计算出控制输出。控制输出可以是力矩或推力等
⛄ 部分代码
function out=stacontrol_feilun(t,state)global Ix Iy Iz If Wo Etheta1 Etheta2 Etheta3 kp1 kd1 kp2 kd2 kp3 kd3theta1=state(1);theta2=state(2);theta3=state(3);w1=state(4);w2=state(5);w3=state(6); %飞轮角速度o1=state(7);o2=state(8);o3=state(9); %飞轮角速度%------------------theta1dot=w1*cos(theta1)+w3*sin(theta1)+sin(theta3)*Wo;theta2dot=w2+(w1*sin(theta1)-w3*cos(theta2))*tan(theta1)+Wo*cos(theta3)/cos(theta1);theta3dot=(-w1*sin(theta2)+w3*cos(theta2))/cos(theta1)-Wo*tan(theta1)*cos(theta3);%-----------% kp1=4000; kd1=4000; kp2=9500; kd2=9500; kp3=8000; kd3=8000;%% 卫星飞轮动力学w1dot=(Iy-Iz)/Ix*w2*w3+(kp1*(Etheta1-theta1)/If+kd1*(0-(w1*cos(theta1)+w3*sin(theta1)+sin(theta3)*Wo))/If+o3*w2-o2*w3)*If/Ix;w2dot=(Iz-Ix)/Iy*w3*w1+(kp2*(Etheta2-theta2)/If+kd2*(0-(w2+(w1*sin(theta1)-w3*cos(theta2))*tan(theta1)+Wo*cos(theta3))/cos(theta1))/If+o1*w3-o3*w1)*If/Iy;w3dot=(Ix-Iy)/Iz*w1*w2+(kp3*(Etheta3-theta3)/If+kd3*(0-((-w1*sin(theta2)+w3*cos(theta2))/cos(theta1)-Wo*tan(theta1)*cos(theta3)))/If+o2*w1-o1*w2)*If/Iz;%% 飞轮角加速度omig1=kp1*(Etheta1-theta1)/If+kd1*(0-(w1*cos(theta1)+w3*sin(theta1)+sin(theta3)*Wo))/If;omig2=kp2*(Etheta2-theta2)/If+kd2*(0-(w2+(w1*sin(theta1)-w3*cos(theta2))*tan(theta1)+Wo*cos(theta3))/cos(theta1))/If;omig3=kp3*(Etheta3-theta3)/If+kd3*(0-((-w1*sin(theta2)+w3*cos(theta2))/cos(theta1)-Wo*tan(theta1)*cos(theta3)))/If;%---------% out=[theta1dot;theta2dot;theta3dot;w1dot;w2dot;w3dot;omig1;omig2;omig3];out=[theta1dot;theta2dot;theta3dot;w1dot;w2dot;w3dot;omig1;omig2;omig3];
⛄ 运行结果
⛄ 参考文献
[1] 陈将俊.基于Matlab与FPGA的小卫星姿态控制系统的设计与仿真[D].大连理工大学,2015.
[2] 单晓微.基于液体动量环的小卫星姿态控制方法研究[D].哈尔滨工业大学[2023-07-19].
[3] 戴彦,申彦春,王金红.FPGA在小卫星姿态控制系统中的应用[J].电光与控制, 2009, 16(7):4.DOI:10.3969/j.issn.1671-637X.2009.07.021.
















 897
897











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











