







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
水面无人船舶技术的发展已经成为无人船舶领域的热点研究方向之一。在实际应用中,水面无人船舶需要具备较强的镇定控制能力,以应对海洋环境的复杂性和多变性。针对这一问题,基于快速终端滑模控制方法的水面无人船舶镇定控制成为了研究的重点之一。
快速终端滑模控制方法是一种针对非线性系统设计的控制方法,其特点是具有较强的鲁棒性和快速的响应速度。在水面无人船舶的镇定控制中,快速终端滑模控制方法可以有效地克服海洋环境的不确定性和外部扰动,保证无人船舶的稳定性和安全性。
在实际应用中,水面无人船舶镇定控制需要考虑到船舶动力学模型的复杂性和海洋环境的多变性。基于快速终端滑模控制方法的水面无人船舶镇定控制可以通过设计滑模面和控制律来实现对船舶位置、速度和姿态的精确控制,从而保证船舶在海洋环境中的稳定性和安全性。
此外,快速终端滑模控制方法还可以通过引入终端区设计和快速控制律设计来提高控制系统的响应速度和鲁棒性。这对于水面无人船舶而言尤为重要,因为船舶需要在复杂多变的海洋环境中快速做出反应,以保证船舶的安全航行和任务执行。
总的来说,基于快速终端滑模控制方法的水面无人船舶镇定控制是一种有效的控制方法,可以有效地提高无人船舶在海洋环境中的镇定控制能力,保证船舶的稳定性和安全性。随着水面无人船舶技术的不断发展,基于快速终端滑模控制方法的水面无人船舶镇定控制将会得到更广泛的应用和研究。希望未来能够有更多的研究者和工程师投入到这一领域,共同推动水面无人船舶技术的发展和应用。
📣 部分代码
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%function dz=PlantModel(t,z)global aifa beita gamaglobal z60 k aifa0 beita0 aifa1 beita1 q0 p0 q1 p1dz = zeros(6,1);s0=z(2)*exp(k*t)/z60;Z2=s0;Z4=z(4)+k*Z2;s1=z(4)+k*s0+aifa0*s0+beita0*sign(s0)*abs(s0)^(q0/p0);u1=-(k+aifa0+beita0*q0/p0*sign(s0)*abs(s0)^(q0/p0-1))*Z4-aifa1*s1-beita1*sign(s1)*abs(s1)^(q1/p1);u2=-k*z(6);dz(1) = -beita/aifa*z(1)-beita/aifa*z(4)+z(2)*z(6)-1/beita*z(5)*z(6)+gama/beita*z(3)*z(6);dz(2) = z(4)*z(6);dz(3) = z(6);dz(4) = u1;dz(5) = -beita*z(5)+beita*z(6)*(z(1)+z(4))+gama*z(6);dz(6) = u2;
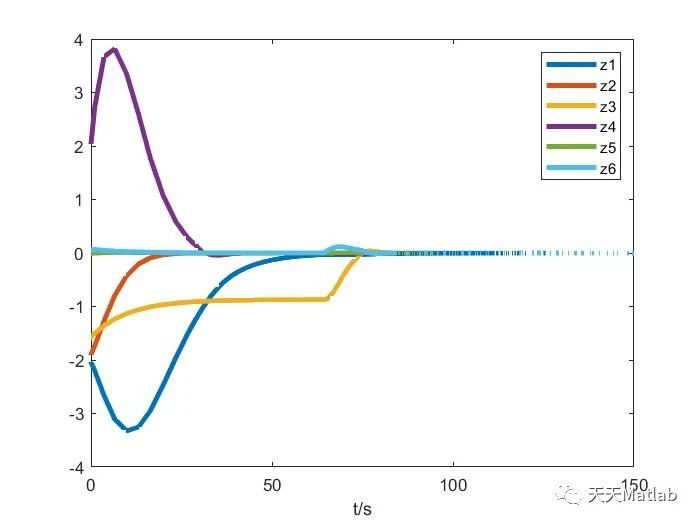
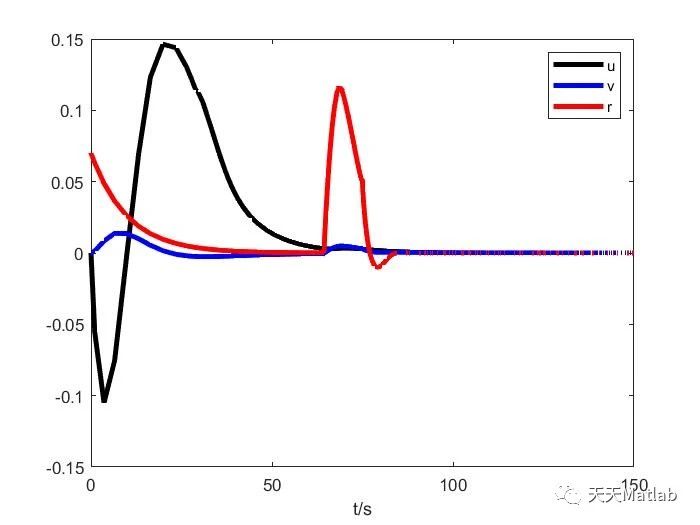
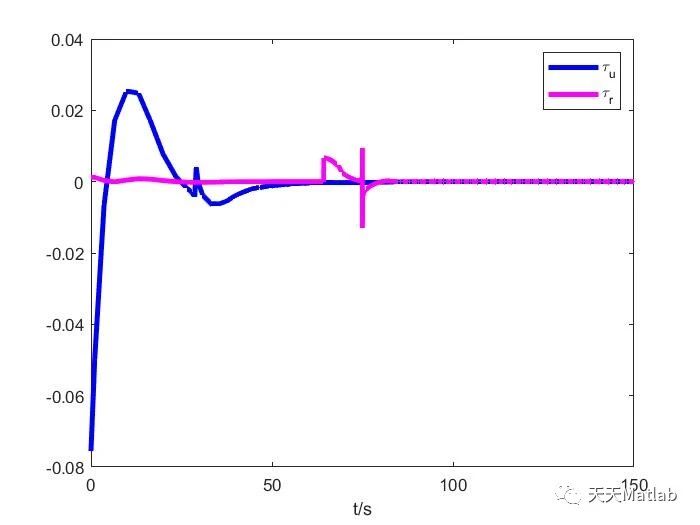
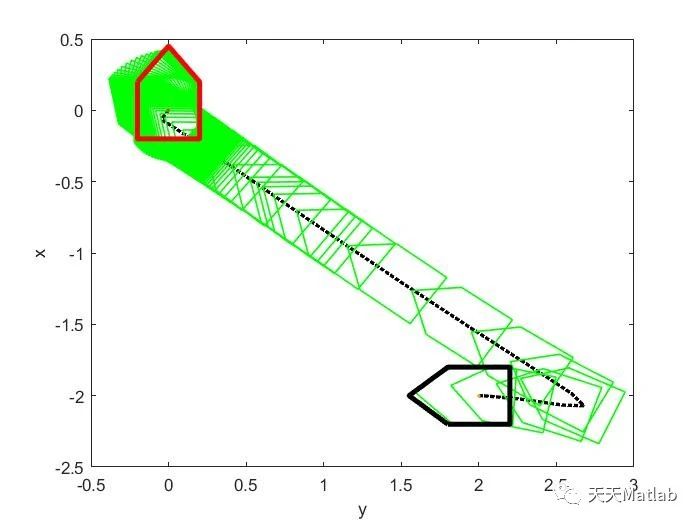
⛳️ 运行结果
🔗 参考文献
本程序参考以下中文EI期刊,程序注释清晰,干货满满。
[1] 关海滨,艾矫燕.全局快速终端滑模控制在欠驱动无人船镇定中的应用研究[J].广西大学学报:自然科学版, 2018, 43(6):12.DOI:CNKI:SUN:GXKZ.0.2018-06-009.
[2] 贺倩,黄宴委.基于非奇异终端滑模控制的水面无人船轨迹跟踪[J].电工技术, 2021(10):4.DOI:10.19768/j.cnki.dgjs.2021.10.012.
















 1252
1252











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











