






✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
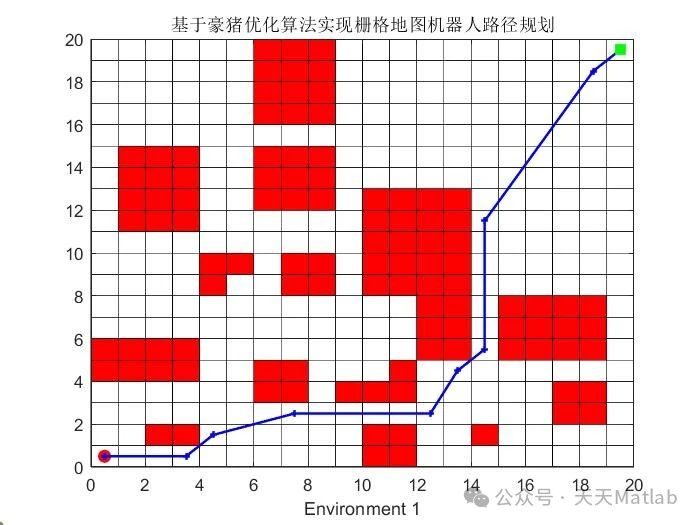
在机器人领域,路径规划是机器人自主导航的关键技术之一。栅格地图是机器人环境感知的重要数据结构,它将机器人所在环境划分为一个个规则的网格,每个网格表示环境中某一点的状态(如可通行或不可通行)。基于栅格地图的机器人最短路径规划,是路径规划领域的一个经典问题。
豪猪算法 (CPO)
豪猪算法 (CPO) 是一种基于概率的路径规划算法,它模拟了豪猪在迷宫中寻找食物的过程。豪猪算法的主要思想是:
-
将机器人当前位置作为起点,将目标位置作为终点。
-
在起点和终点之间随机生成一条路径。
-
根据路径上每个网格的概率值,计算路径的总概率。
-
如果路径的总概率高于某个阈值,则接受该路径;否则,重新生成一条路径。
-
重复步骤 2-4,直到找到一条满足概率阈值的路径。
CPO 算法在栅格地图中的实现
在栅格地图中实现 CPO 算法时,需要考虑以下因素:
-
**网格概率:**每个网格的概率值反映了机器人通过该网格的可能性。可通行网格的概率值较高,不可通行网格的概率值较低。
-
**路径概率:**路径的总概率是路径上所有网格概率值的乘积。概率值越高的路径,被接受的可能性越大。
-
**概率阈值:**概率阈值用于判断路径是否满足要求。如果路径的总概率高于阈值,则接受该路径;否则,重新生成一条路径。
CPO 算法的优势
与其他路径规划算法相比,CPO 算法具有以下优势:
-
**简单易懂:**算法原理简单,易于理解和实现。
-
**鲁棒性强:**算法对环境变化不敏感,能够找到满足要求的路径,即使环境中存在障碍物或噪声。
-
**计算效率高:**算法的计算复杂度较低,能够实时规划路径。
应用场景
基于 CPO 算法的栅格地图机器人最短路径规划算法,广泛应用于以下场景:
-
**机器人导航:**为机器人规划从起点到终点的最短路径,实现自主导航。
-
**避障规划:**在存在障碍物的环境中,为机器人规划避开障碍物的最短路径。
-
**搜索和救援:**在灾难现场或其他危险环境中,为机器人规划搜索和救援人员的最短路径。
总结
基于豪猪算法 (CPO) 的栅格地图机器人最短路径规划算法,是一种简单易懂、鲁棒性强且计算效率高的算法。它广泛应用于机器人导航、避障规划和搜索救援等场景。随着机器人技术的不断发展,CPO 算法将在路径规划领域发挥越来越重要的作用。
📣 部分代码
%% 清空环境变量warning off % 关闭报警信息close all % 关闭开启的图窗clear % 清空变量clc % 清空命令行%% 导入数据res = xlsread('数据集.xlsx');%% 划分训练集和测试集temp = randperm(357);P_train = res(temp(1: 240), 1: 12)';T_train = res(temp(1: 240), 13)';M = size(P_train, 2);P_test = res(temp(241: end), 1: 12)';T_test = res(temp(241: end), 13)';N = size(P_test, 2);%% 数据归一化[P_train, ps_input] = mapminmax(P_train, 0, 1);P_test = mapminmax('apply', P_test, ps_input);
⛳️ 运行结果

🔗 参考文献
[1] 石为人,王楷.基于Floyd算法的移动机器人最短路径规划研究[J].仪器仪表学报, 2009(10):5.DOI:10.3321/j.issn:0254-3087.2009.10.014.
[2] 李天成,孙树栋,高扬.基于扇形栅格地图的移动机器人全局路径规划[J].机器人, 2010, 32(4):6.DOI:10.3724/SP.J.1218.2010.00547.
[3] 郝宗波,洪炳镕,黄庆成.Study of coverage path planning based on grid-map基于栅格地图的机器人覆盖路径规划研究*[J].计算机应用研究, 2007, 24(010):56-58.DOI:10.3969/j.issn.1001-3695.2007.10.016.
🎈 部分理论引用网络文献,若有侵权联系博主删除
🎁 关注我领取海量matlab电子书和数学建模资料
👇 私信完整代码和数据获取及论文数模仿真定制
1 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱船配载优化、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化
2 机器学习和深度学习方面
2.1 bp时序、回归预测和分类
2.2 ENS声神经网络时序、回归预测和分类
2.3 SVM/CNN-SVM/LSSVM/RVM支持向量机系列时序、回归预测和分类
2.4 CNN/TCN卷积神经网络系列时序、回归预测和分类
2.5 ELM/KELM/RELM/DELM极限学习机系列时序、回归预测和分类
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU门控神经网络时序、回归预测和分类
2.7 ELMAN递归神经网络时序、回归\预测和分类
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM/长短记忆神经网络系列时序、回归预测和分类
2.9 RBF径向基神经网络时序、回归预测和分类
















 356
356











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











