







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
无人机蛇形机动是指无人机在飞行过程中进行快速且连续的左右摆动,以规避障碍物或躲避敌方攻击。这种机动方式对于无人机在复杂环境中的生存能力至关重要。本文将介绍一种基于模型控制 (MC) 策略的无人机蛇形机动控制方案,并对其进行详细分析。
1. 问题描述
无人机蛇形机动的目标是使无人机在飞行过程中实现快速且连续的左右摆动,同时保持一定的速度和高度。该问题可以被描述为一个非线性、多输入多输出 (MIMO) 控制问题,其中输入为无人机控制指令,输出为无人机的姿态和位置。
2. MC 控制策略
模型控制 (MC) 策略是一种基于模型的控制方法,其核心思想是利用被控对象的数学模型来预测系统的未来状态,并根据预测结果制定控制指令。MC 控制策略可以有效地处理系统非线性、多输入多输出以及参数不确定性等问题。
3. 控制方案设计
为了实现无人机蛇形机动,我们将采用以下 MC 控制方案:
-
系统建模: 首先,需要建立无人机动力学模型,该模型应包含无人机姿态动力学、推力模型、空气动力学模型等。
-
参考轨迹生成: 根据目标机动要求,生成蛇形运动的参考轨迹。参考轨迹可以采用多项式函数或其他曲线拟合方法生成。
-
控制器设计: 设计一个基于模型预测的控制器,该控制器利用无人机模型预测未来状态,并根据参考轨迹制定控制指令,使无人机跟踪参考轨迹。
-
轨迹跟踪: 利用设计的控制器,使无人机跟踪生成的参考轨迹,从而实现蛇形机动。
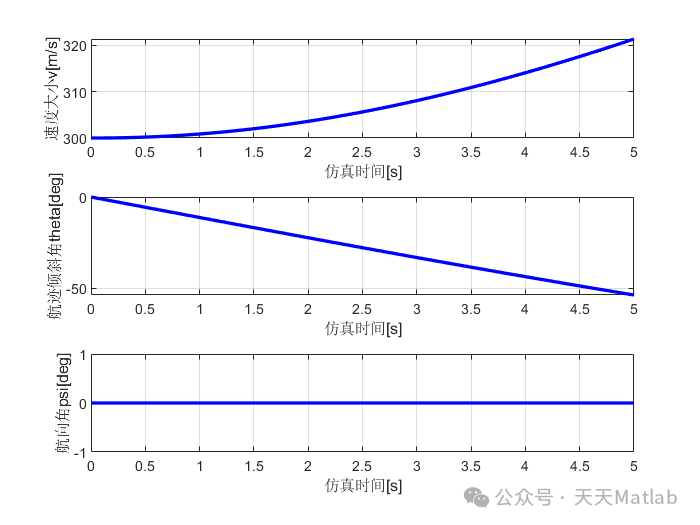
4. 仿真结果分析
为了验证所提出的控制方案,我们进行了仿真实验。仿真结果表明,所设计的控制方案能够有效地使无人机实现蛇形机动。无人机能够快速而平稳地跟踪参考轨迹,同时保持一定的速度和高度。
⛳️ 运行结果

🔗 参考文献
🎈 部分理论引用网络文献,若有侵权联系博主删除
🎁 关注我领取海量matlab电子书和数学建模资料
👇 私信完整代码和数据获取及论文数模仿真定制
1 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱船配载优化、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化、CVRP问题、VRPPD问题、多中心VRP问题、多层网络的VRP问题、多中心多车型的VRP问题、 动态VRP问题、双层车辆路径规划(2E-VRP)、充电车辆路径规划(EVRP)、油电混合车辆路径规划、混合流水车间问题、 订单拆分调度问题、 公交车的调度排班优化问题、航班摆渡车辆调度问题、选址路径规划问题
2 机器学习和深度学习方面
2.1 bp时序、回归预测和分类
2.2 ENS声神经网络时序、回归预测和分类
2.3 SVM/CNN-SVM/LSSVM/RVM支持向量机系列时序、回归预测和分类
2.4 CNN/TCN卷积神经网络系列时序、回归预测和分类
2.5 ELM/KELM/RELM/DELM极限学习机系列时序、回归预测和分类
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU门控神经网络时序、回归预测和分类
2.7 ELMAN递归神经网络时序、回归\预测和分类
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM/长短记忆神经网络系列时序、回归预测和分类
2.9 RBF径向基神经网络时序、回归预测和分类
















 4501
4501

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











