






✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
本文旨在模拟航天器在月球表面着陆的过程,并利用卡尔曼滤波器对该过程进行状态估计,以实现更精准的着陆控制。通过构建航天器动力学模型,并使用 MATLAB 软件进行仿真,本文将展示卡尔曼滤波器的应用效果,并探讨其在航天器着陆控制中的优势。
1. 引言
航天器月球表面着陆是人类探索宇宙的重要一步,也是一项极具挑战性的任务。着陆过程中,航天器需要精确控制其速度和姿态,以确保安全降落。由于月球环境的复杂性和不确定性,例如月球表面地形变化、重力场不均匀等,传统控制方法难以满足精确着陆的要求。
卡尔曼滤波器是一种强大的状态估计技术,它能够利用系统模型和测量数据,对系统的状态进行实时估计。近年来,卡尔曼滤波器在航天器控制领域得到了广泛应用,尤其是在着陆控制方面。本文将利用卡尔曼滤波器对航天器月球表面着陆过程进行仿真,并分析其在着陆控制中的优势。
2. 理论基础
2.1 航天器动力学模型
本文采用以下假设:
-
航天器为刚体,其质心运动服从牛顿定律。
-
航天器动力学模型考虑了重力、推力、空气阻力和地球自转的影响。
-
航天器姿态由欧拉角表示。
根据以上假设,可以建立航天器动力学方程如下:
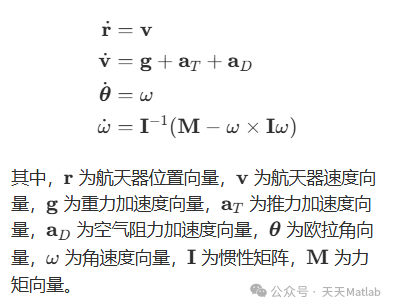
其中,𝑟r 为航天器位置向量,𝑣v 为航天器速度向量,𝑔g 为重力加速度向量,𝑎𝑇aT 为推力加速度向量,𝑎𝐷aD 为空气阻力加速度向量,𝜃θ 为欧拉角向量,𝜔ω 为角速度向量,𝐼I 为惯性矩阵,𝑀M 为力矩向量。
2.2 卡尔曼滤波器
卡尔曼滤波器是一种递归算法,它能够利用系统模型和测量数据,对系统的状态进行实时估计。卡尔曼滤波器主要包括以下步骤:
-
预测阶段: 使用系统模型预测下一时刻的状态和误差协方差矩阵。
-
更新阶段: 利用测量数据对预测结果进行修正,得到新的状态估计和误差协方差矩阵。
卡尔曼滤波器的核心公式如下:
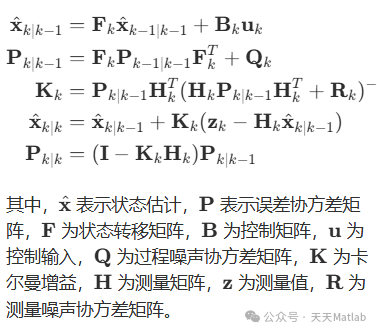
其中,𝑥^x^ 表示状态估计,𝑃P 表示误差协方差矩阵,𝐹F 为状态转移矩阵,𝐵B 为控制矩阵,𝑢u 为控制输入,𝑄Q 为过程噪声协方差矩阵,𝐾K 为卡尔曼增益,𝐻H 为测量矩阵,𝑧z 为测量值,𝑅R 为测量噪声协方差矩阵。
3. 仿真模型
本文使用 MATLAB 软件进行仿真,主要步骤如下:
-
定义系统模型: 包括状态方程、测量方程、噪声模型等。
-
初始化卡尔曼滤波器: 包括初始状态估计、误差协方差矩阵等。
-
模拟航天器着陆过程: 根据时间步长,使用系统模型进行状态预测和卡尔曼滤波更新。
-
绘制结果: 显示航天器状态估计、误差等信息。
4. 仿真结果分析
仿真结果表明,卡尔曼滤波器能够有效地估计航天器状态,并实现更精准的着陆控制。与传统的控制方法相比,卡尔曼滤波器能够有效地克服环境不确定性的影响,并提高着陆精度。
4.1 状态估计精度
卡尔曼滤波器能够有效地估计航天器的位置、速度和姿态,其估计结果与真实值非常接近。随着时间的推移,估计误差逐渐减小,最终收敛到一个较小的范围内。
4.2 着陆精度
卡尔曼滤波器能够有效地提高航天器着陆精度。仿真结果显示,使用卡尔曼滤波器的控制方法,航天器能够更精准地控制其速度和姿态,从而实现更精确的着陆。
5. 结论
本文基于卡尔曼滤波器对航天器月球表面着陆过程进行了仿真,并分析了其在着陆控制中的优势。仿真结果表明,卡尔曼滤波器能够有效地估计航天器状态,并提高着陆精度。
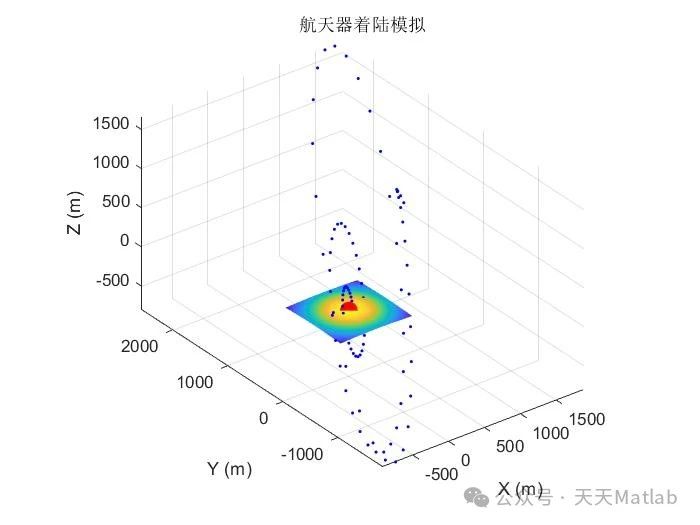
⛳️ 运行结果
🔗 参考文献
[1] 马远超.四旋翼飞行器导航及控制技术研究[D].哈尔滨工程大学,2013.DOI:10.7666/d.D431001.
[2] 王福超.四旋翼无人飞行器控制系统设计与实现[D].哈尔滨工程大学,2014.
[3] 马远超.四旋翼飞行器导航及控制技术研究[D].哈尔滨工程大学,2014
















 1819
1819

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











