







1 CAN通讯用来做什么
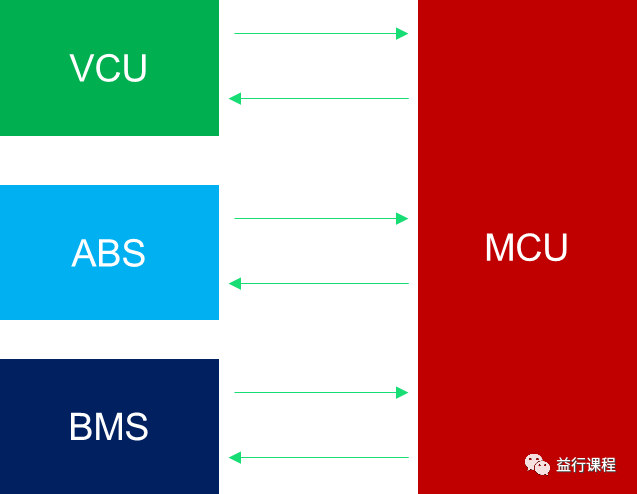
现代汽车有非常多的控制器(ECU,Electronic Control Unit), 这些控制器可以实现各种各样的功能。有些功能只需要一个控制器就可以实现,而更多功能是需要多个控制器联合控制才能实现,这就意味着这些控制器之间需要进行信息交互,比如电机控制功能,电机控制器(MCU,Motor Control Unit)一方面需要获取整车控制器(VCU,Vehicle Control Unit)的目标电机扭矩或目标电机转速等信息,另一方面MCU需要反馈实际电机扭矩或实际电机转速等信息给VCU。当然不仅仅只有MCU和VCU的信息交互,还有MCU与其他控制器(ABS, BMS和BCM等)的信息交互。
因此,需要采取怎样的方法来实现它们之间的信息交互呢?目前,汽车控制器之间的通讯主要使用控制器区域网络(CAN, Controller Area Network)、局域互联网络(LIN, Local Interconnect Network)和 FlexRay等。随着汽车车载网络架构向着高度集成的域控制器发展,以太网(Ethernet)也将被使用。这样整车的车载网络发展趋势就会越来越复杂,也越来越多样化,如下所示:
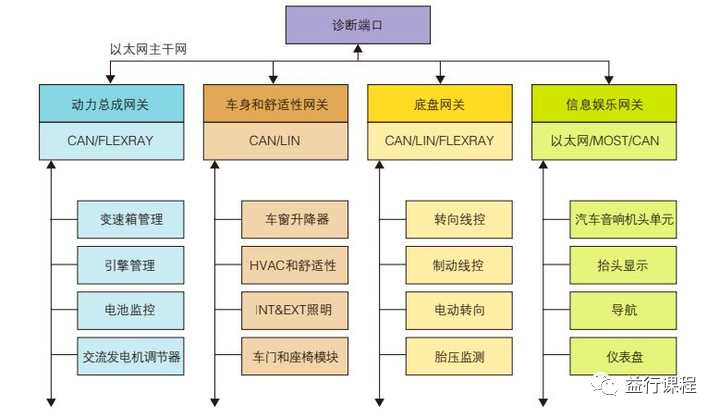
source:车身电子的未来发展 - 白皮书 (nxp.com)
通过上图不难发现,虽然通讯方式更复杂了,但CAN通讯仍将无处不在,仍然对控制器之间的信息交互起着至关重要的作用。因此,只要在稍微复杂一点的控制器上,都会采用CAN通讯。那么对于CAN通讯,一般都会提一些怎样的需求呢?
2 CAN通讯需求有哪些
汽车控制器的最常见开发方式都是采用V流程。即首先提出了产品的功能或性能要求,然后经过系统(System)分析与评估,再分配给软件(Software)和硬件(Hardware),接着软件和硬件进行相应的设计,测试和验证,最后由系统进行测试,验证和确认。
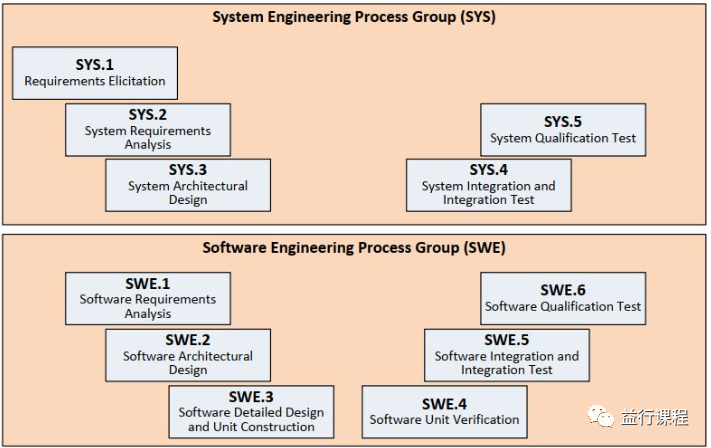
source:automotivespice.com/fileadmin/software-download/AutomotiveSPICE_PAM_31.pdf
本文仅限于CAN通讯需求层面的探讨,以MCU为例,在客户层面,可能客户会提出:
-
MCU需要几条CAN
-
每条CAN具体怎么用
-
每条CAN需要具备哪些功能
-
每条CAN传输速率要求是怎样
-
每条CAN是否需要终端电阻
这些需求就是控制器V流程开发的发起点,一般称为客户需求或者利益相关者需求(stakeholder requirement),然后在系统层面,系统工程师会拉上相关利益者(客户,软硬件成员和项目管理成员等)一起来评估这些需求,双方经过多次详细沟通,最终确定这些需求,这个过程对应Aspice的SYS.1需求挖掘阶段。接着在系统层面将确定的利益相关者需求进行分解,对应着Aspice的SYS.2系统需求分析,接着上面的例子,CAN通讯的利益相关者需求被分解得到系统需求如下:
-
MCU需要两条CAN,一条用于控制器间通讯CAN1,另一条用于诊断和标定CAN2
-
CAN1需要支持Classical CAN和CAN FD
-
CAN1需要支持标准和扩展两种格式的数据帧
-
CAN1需要根据已提供的CAN报文协议(CAN matrix)进行开发
-
CAN1需要配置1个终端电阻
-
CAN1需要支持报文唤醒功能
-
CAN1需要支持传输速率可标定等
3 CAN通讯需求解析
下面就一条一条来解析上面提出CAN通讯的系统需求。
3.1 MCU需要两路CAN,一路用于控制器间通讯CAN1,另一路用于诊断和标定CAN2
对于这条需求,为什么MCU需要两路CAN?
一般是为了降低单路CAN总线上的负载率,所以主机厂(OEM)在开发过程中会一般会设置两路CAN,一路用作基本通讯,上面挂载整车控制器,电机控制器和电池管理控制器等节点。另一路则用于车辆开发过程中通过标定协议XCP读取控制器内部变量或诊断协议UDS服务进行诊断通讯,通常叫做诊断CAN或标定CAN,量产后一般会被禁用。
这条需求通常由主机厂(OEM)发起,供应商需要怎么评估呢?对于供应商来说,主要评估当前的控制器硬件是否满足,即从接插件Pin数量是否足够提供两路CAN_H和CAN_L,PCB是否有足够空间布置两颗CAN收发器及其相应的处理电路,以及微控制器芯片中CAN控制器数量是否足够。

这条需求要求的是2路CAN的情况,那还有其他情况吗?
随着汽车智能驾驶功能的增加,主机厂一般会需要再增加一路CAN,即所谓的ADAS CAN。当然也有些控制器只是负责简单的执行功能,这时可能就只需要1路CAN,即与其他控制通讯以及诊断标定共用一路CAN。
3.2 CAN1需要支持Classical CAN和CAN FD
对于这条需求,毫无疑问肯定支持Classical CAN ,而要支持CAN FD,那么需要考虑哪些因素呢?
主要考虑两个方面:一方面是控制器硬件,即CAN收发器和MCU的CAN控制器是否支持CAN FD;另一方面是控制器软件,CAN通讯功能模块需是否支持CAN FD报文的处理。
这里对CAN FD稍作描述:
1) CAN FD产生的原因。随着电动汽车和智能驾驶汽车技术的快速发展,仅使用Classical CAN面临传输的速度不够快,一次传输的数据不够多的问题,即带宽和数据场长度受到制约。因此,为了避免使用其他通讯形式而造成大幅提高成本的问题,就提出了CAN FD总线方案,即可变速率和新的数据场长度。
2)CAN FD的可变速率。它是指CAN FD采用了两种位速率:从控制场中的BRS位到ACK场之前(含CRC分界符)为可变速率,如下图蓝色部分,其余部分为原CAN总线用的速率。两种速率各有一套位时间定义寄存器,它们除了采用不同的位时间单位TQ外,位时间各段的分配比例也可不同。
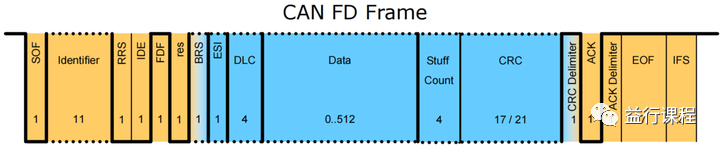
source:CANFD an introduction, from Vector
3)CAN FD的数据场长度。它是指CAN FD对数据场的长度作了很大的扩充,DLC最大支持64个字节,在DLC小于等于8时与原CAN总线是一样的,大于8时有一个非线性的增长,所以最大的数据场长度可达64字节,如下所示。
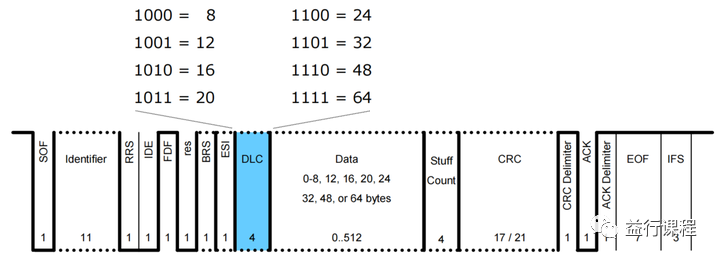
source:CANFD an introduction, from Vector
因此使用CAN FD时,还需要提可变速率和数据长度的需求。
3.3 CAN1需要支持标准和扩展两种格式的数据帧
对于这条需求,不管是Classical CAN 还是CAN FD都适用,涉及的变更在控制器软件。为了更好地理解这条需求,这里详细解释下标准格式和扩展格式的区别。
首先,对于Classical CAN,标准格式和扩展格式的区别在仲裁段,即:标准格式的仲裁段包含11位基本ID位和RTR位,而扩展格式的仲裁段除了11位基本ID位和RTR位外,还包含SRR位,IDE位和18位扩展ID位,如下所示:
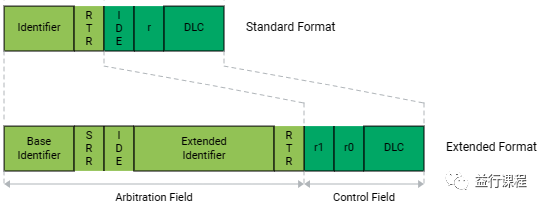
source:CAN_E: Data Frame (vector.com)
这样,标准格式可表示的CAN ID(11位) 范围为 0X000~0X7FF,而扩展格式可表示的CAN ID(29位)范围为0X00000000~0X1FFFFFFF。一般乘用车上常用标准格式的CAN ID,而商用车上常用扩展格式的CAN ID。
注意:标准格式的RTR位对应扩展格式SRR位,为什么这样设置呢?因为标准格式的RTR位恒为显性,扩展格式的SRR位恒为隐性,根据线与机制,当前11位基本ID位相同时,使得标准格式的数据帧优先级高于扩展格式的数据帧。关于仲裁段中其他位的作用因与本文主题无关,故此处不作说明,可参考: 一篇易懂的CAN通讯协议指南1 - 知乎 (zhihu.com)
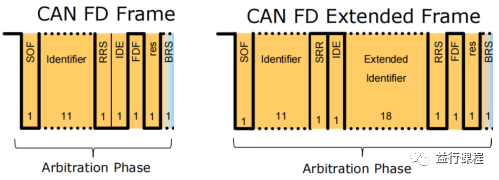
然后,对于CAN FD,标准格式和扩展格式的区别同样也在仲裁段,其机制与Classical CAN情况完全一样,如下所示:
限于篇幅控制,本文暂且介绍到此,想要继续了解剩余需求解析,请期待续文。
---------------------------------------------------------------------------------------------------------------------------------
创作不易,欢迎点赞收藏关注。
汽车研发交流群,有兴趣的朋友请添加群主:prOmiseyes,备注:公司+职务入群。仅限汽车行业从业人员。















 967
967











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









