







目录
概述
本文主要介绍克拉克变换和帕克变换的原理和算法实现,同时介绍了克拉克变换的逆变换和帕克变换的逆变换,并给出推导数学计算和验证波形图。
1 克拉克和帕克变换的定义
1.1 克拉克变换
克拉克变换和帕克变换等坐标变换在三相交流电机的FOC中的应用很常见。克拉克变换将三相系统(在 abc 坐标系中)的时域分量转换为正交静止坐标系 (αβ) 中的两个分量。
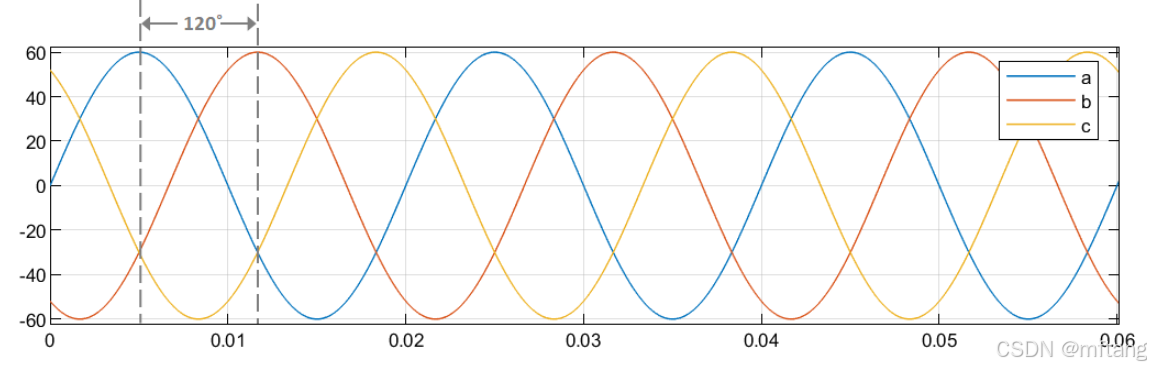
图一: 三相系统(在 abc 坐标系中)的时域分量
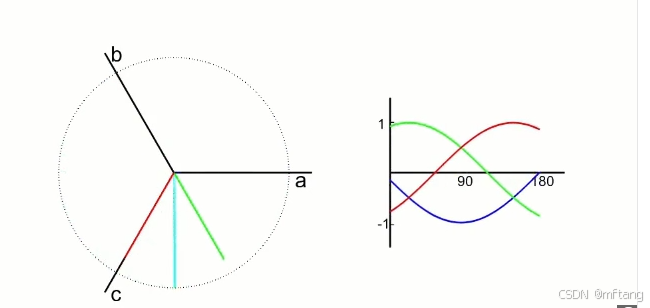
上图的波形经过Clark变换之后,会将其转换为两相的αβ坐标系
图二: 克拉克变换 (αβ) 生成的信号
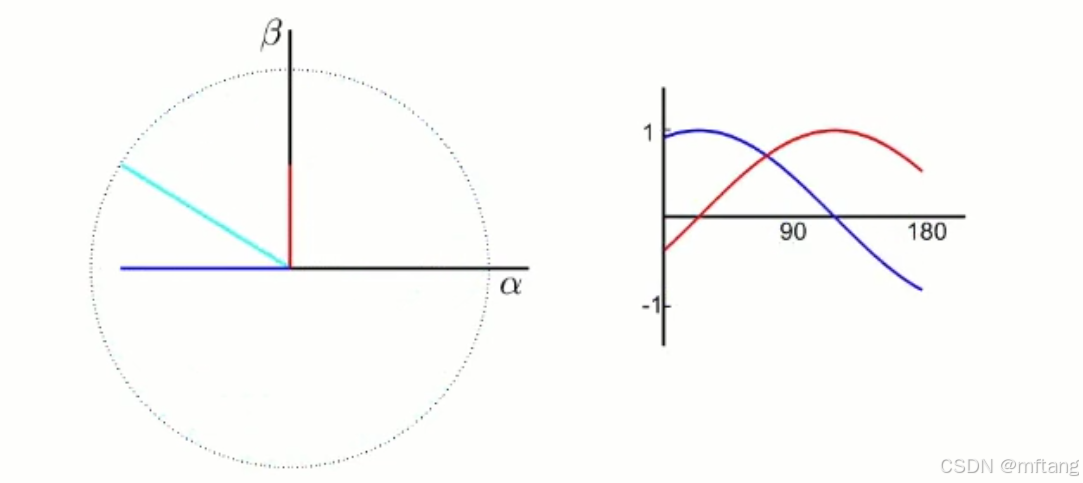
1.2 帕克变换
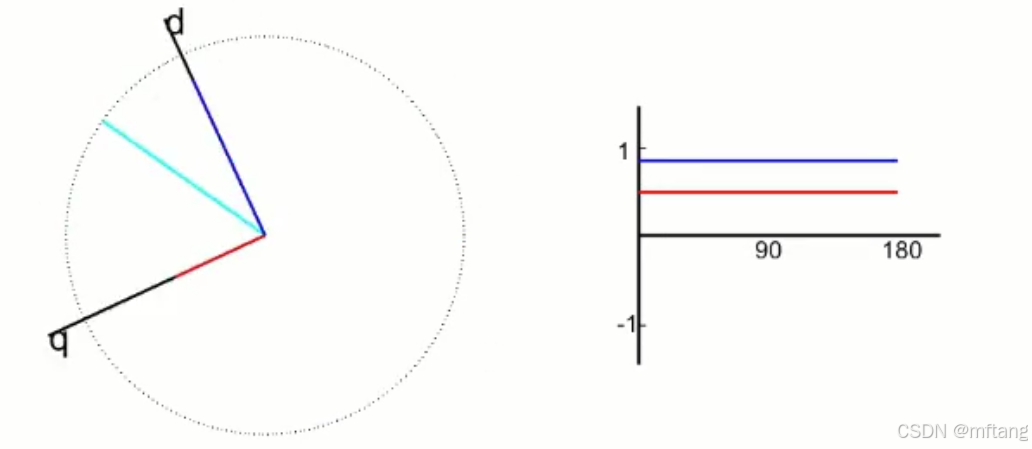
帕克变换将 αβ 坐标系中的两个分量转换为正交旋转参考坐标系 (dq) 中的分量。以连续方式实现这两种变换可简化计算,因为它们能够将交流电流和电压波形转换为直流信号。
图二: 帕克变换生成(dq) 的信号
2 Clarke Transform 实现原理
2.1 Clarke Transform
2.1.1 转换方法
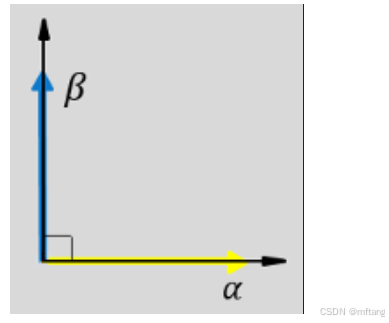
Clarke Transform 模块计算 abc 参考系中平衡三相分量的克拉克变换,并输出静止 αβ 参考系中平衡两相正交分量。该模块也可以计算三相分量 a、b 和 c 的克拉克变换,并输出分量 α、β 和 0。对于平衡系统,零分量等于零。使用输入数参数以使用两个或三个输入。
使用双输入配置时,该模块接受三相 (abc) 中的两个信号,自动计算第三个信号,并输出 αβ 参考系中的对应分量。
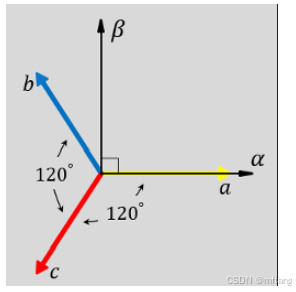
例如,该模块接受 a 和 b 输入值或多路复用输入值 abc,其中相位 a 轴与 α 轴对齐。
图一:定子绕组在 abc 参考系和静止 αβ 参考系中的磁轴方向

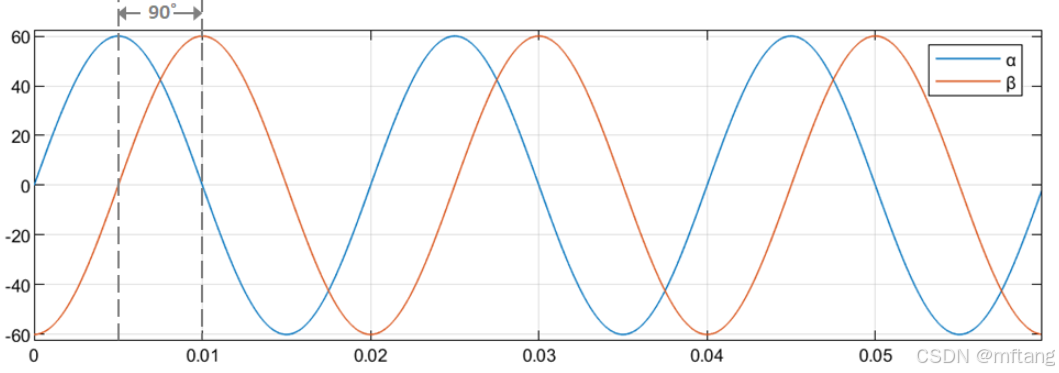
图二: 静止 αβ 参考系中的等效 α 和 β 分量
2.1.2 转换波形
等效平衡的 abc 和 αβ 系统的单个分量的时间响应

经过 Clarke Transform之后,形成 αβ 系统的波形,具体图像如下:
2.1.3 数学原理
以下方程描述克拉克变换计算:

对于电机等平衡系统,零序分量计算始终为零。例如,电机的电流可以表示为:

因此,在三相电机驱动中可以只使用两个电流传感器,可以将其中的第三相计算为:

通过使用以下方程,该模块将克拉克变换实现为:

参数介绍:
fa、fb 和 fc 是 abc 参考系中的平衡三相分量。
fα 和 fβ 是静止 αβ 参考系中的平衡两相正交分量。
f0 是静止 αβ 参考系中的零分量。
2.2 Inverse Clarke Transform
2.2.1 转换方法
Inverse Clarke Transform 模块计算静止 αβ 参考系中平衡的两相正交分量的克拉克逆变换,并输出静止 abc 参考系中平衡的三相分量。该模块也可以计算分量 α、β 和 0 的克拉克逆变换,以输出三相分量 a、b 和 c。对于平衡系统,零分量等于零。使用输入数参数以使用两个或三个输入。
该模块接受 α-β 轴分量作为输入,并输出对应的三相信号,其中相位 a 轴与 α 轴对齐。
图一: αβ 参考系中的 α 和 β 输入分量

图二: abc 参考系和 αβ 参考系中等效的 a、b 和 c 输出分量的方向
2.2.2 转换波形
等效平衡的 αβ 和 abc 系统的单个分量的时间响应。
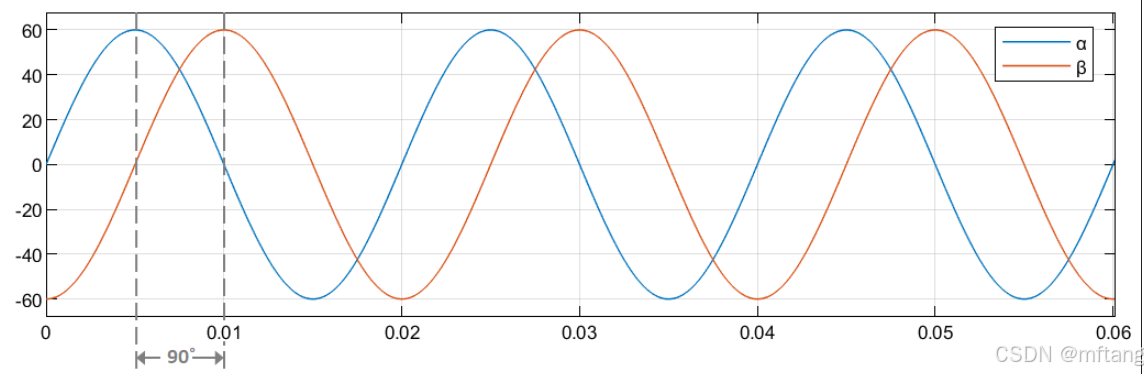
经过 Inverse Clarke Transform 后,得到 abc 系统的波形图
2.2.3 数学原理
以下方程描述了克拉克逆变换计算:
对于电机等平衡系统,零序分量计算始终为零:
ia+ib+ic=0
因此,在三相电机驱动中可以只使用两个电流传感器,您可以将其中的第三相计算为,
ic=−(ia+ib)
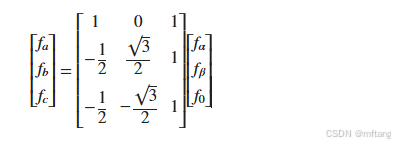
通过使用以下方程,该模块将克拉克逆变换实现为:

参数介绍:
fα 和 fβ 是静止 αβ 参考系中的平衡两相正交分量。
f0 是静止 αβ 参考系中的零分量。
fa、fb 和 fc 是 abc 参考系中的平衡三相分量。
3 Park Transform 实现原理
3.1 Park Transform
3.1.1 转换方法
Park Transform 模块计算静止 αβ 参考系中两相正交分量(α、β)或多路复用 αβ0 分量的帕克变换。该模块接受以下输入:
静止参考系中的 α-β 轴分量或多路复用分量 αβ0。使用输入数参数以使用两个或三个输入。
对应变换角度的正弦值和余弦值。
在使用双输入配置时,它会输出旋转 dq 参考系中的正交直轴 (d) 和交轴 (q) 分量。在使用三输入配置时,它输出多路复用分量 dq0。
对于平衡系统,零分量等于零。
可以配置模块,使 d 轴或 q 轴在时间 t = 0 处与 α 轴对齐。
下列各图显示在以下情形下 αβ 参考系和旋转 dq 参考系中的 α-β 轴分量:
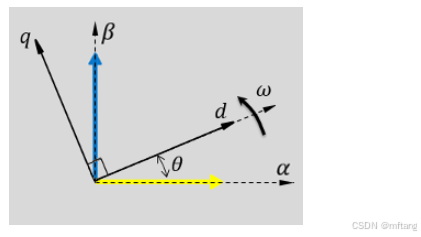
图一:d 轴与 α 轴对齐

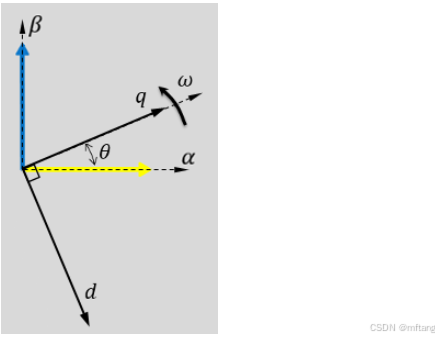
图二: q 轴与 α 轴对齐
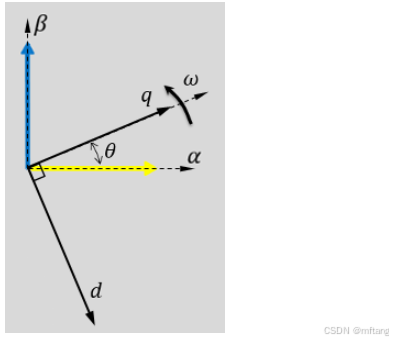
在这两种情形下,角度 θ = ωt,其中:
θ 是 d 轴对齐时 α 轴和 d 轴之间的夹角,或是 q 轴对齐时 α 轴和 q 轴之间的夹角。它指示旋转 dq 参考系相对于 α 轴的角位置。
ω 是 d-q 参考系的转速。
t 是从初始对齐开始的时间,以秒为单位。
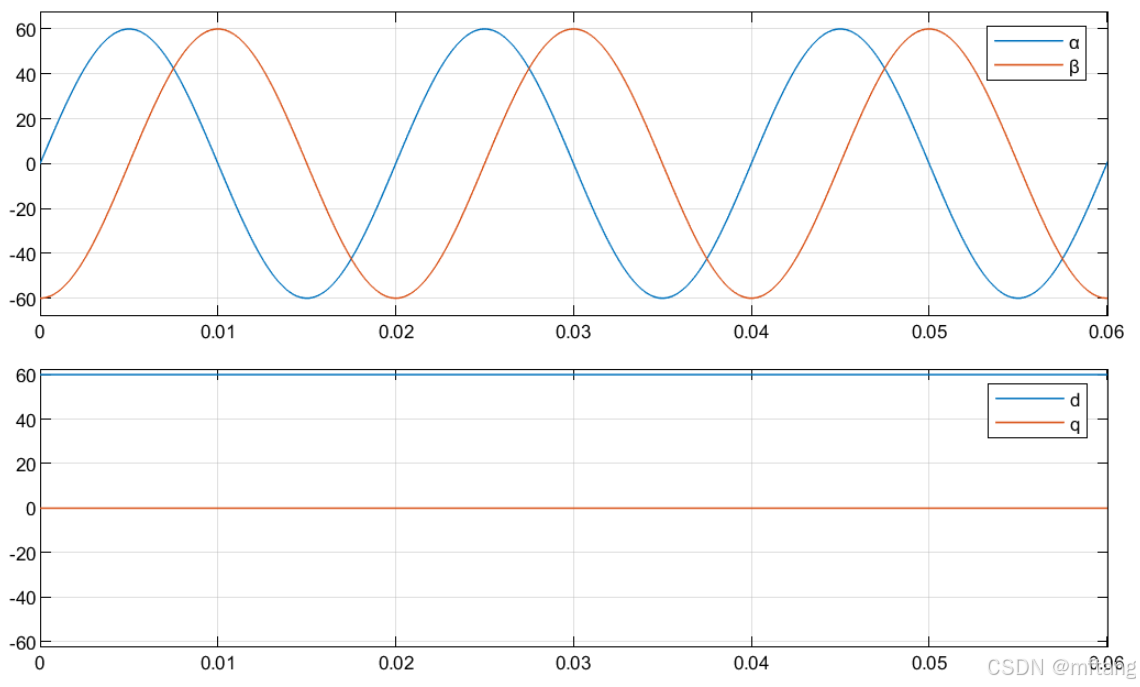
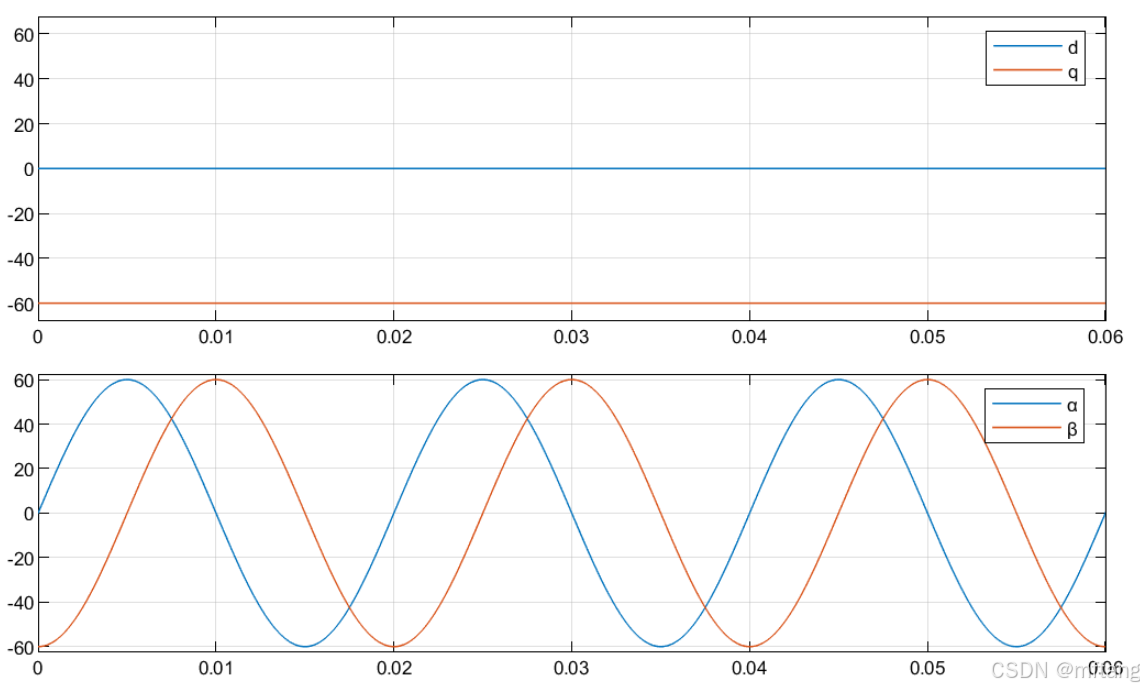
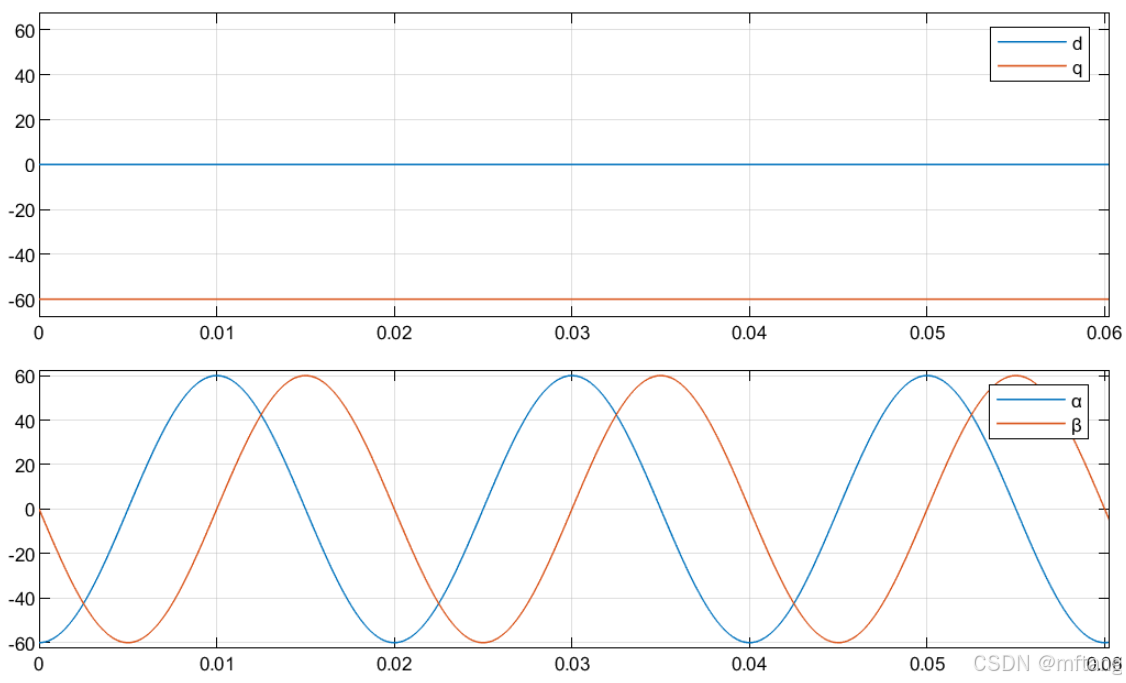
3.1.2 转换波形
下列各图显示 αβ 和 dq 参考系的各个分量在以下情形的时间响应:
图一:d 轴与 α 轴对齐。
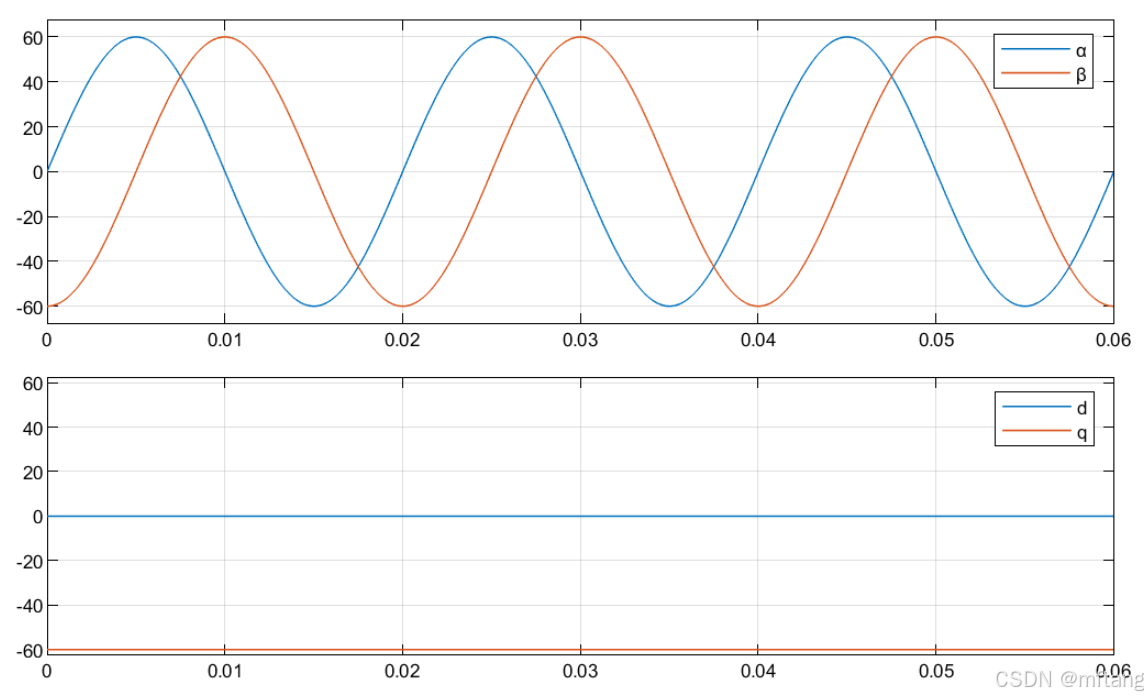
图二:q 轴与 α 轴对齐。
3.1.3 数学原理
以下方程描述模块如何实现帕克变换。
当 d 轴与 α 轴对齐时:

当 q 轴与 α 轴对齐时:

其中:
fα 和 fβ 是静止 αβ 参考系中的两相正交分量。
fd 和 fq 是旋转 dq 参考系中的直轴和交轴正交分量。
3.2 Inverse Park Transform
3.2.1 转换方法
Inverse Park Transform 模块计算正交直轴 (d) 和正交轴 (q) 分量或旋转 dq 参考系中的多路复用 dq0 分量的帕克逆变换。可以对该模块进行配置,使 d 轴或 q 轴在时间 t = 0 处与 α 轴对齐。
该模块接受以下输入:
旋转参考系中的 d-q 轴分量或多路复用分量 dq0。使用输入数参数以使用两个或三个输入。
对应变换角度的正弦值和余弦值。
在使用双输入配置时,它输出静止 αβ 参考系中的两相正交分量。在使用三输入配置时,它输出多路复用分量 αβ0。对于平衡系统,零分量等于零。
下列各图显示在以下情形下的旋转 dq 参考系和 αβ 参考系中的 α-β 轴分量:
图一:d 轴与 α 轴对齐
图二:q 轴与 α 轴对齐
在这两种情形下,角度 θ = ωt,其中:
θ 是 d 轴对齐时 α 轴和 d 轴之间的夹角,或是 q 轴对齐时 α 轴和 q 轴之间的夹角。它指示旋转 dq 参考系相对于 α 轴的角位置。
ω 是 d-q 参考系的转速。
t 是从初始对齐开始的时间,以秒为单位。
3.2.2 转换波形
下列各图显示 αβ 和 dq 参考系的各个分量在以下情形的时间响应:
图一:d 轴与 α 轴对齐
图二:q 轴与 α 轴对齐
3.2.3 数学原理
以下方程描述了该模块如何实现帕克逆变换。
当 d 轴与 α 轴对齐时:

当 q 轴与 α 轴对齐时:

其中:
fd 和 fq 是旋转 dq 参考系中的直轴和交轴正交分量。
fα 和 fβ 是静止 αβ 参考系中的两相正交分量。
参看文献:
https://ww2.mathworks.cn/help/mcb/ref/inverseparktransform.html
















 5041
5041

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









