







一、工况设置
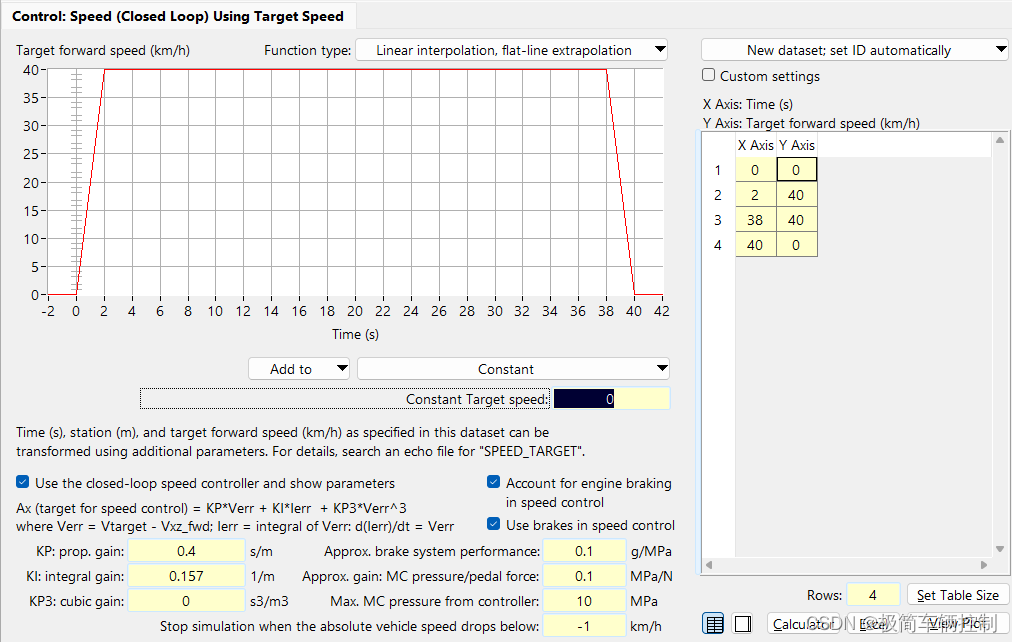
加减速:从0开始加速--匀速40Km/h--减速至0;
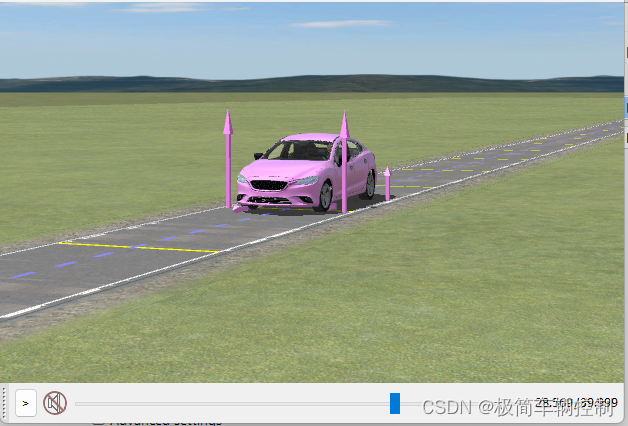
转向:在道路65m~70m之间,有一个转向变道再回来的避障动作。

路面设置:C级路面,300m处,设置高30mm的减速带。
二、实验目标
1、对比车辆运动解算结果的准确性,运动解算的文章:整车运动解算及与carsim仿真对比_carsim plot垂向位移-CSDN博客
2、对比加入控制后,侧倾性能是否提升,相关文章:
转向侧倾控制模块开发及与carsim联合仿真对比-CSDN博客
3、对比加入控制后,纵向控制性能是否提升,相关文章:
制动点头与加速抬头控制及与carsim联合仿真对比-CSDN博客
4、对比加入控制后,粗糙路面上,滤振效果是否提升,相关文章:
SH垂向控制模块开发及与carsim联合仿真对比-CSDN博客
5、对比加入控制后,过减速带时,性能是否有提升,相关文章:
三、仿真模型说明:
1、carsim配置
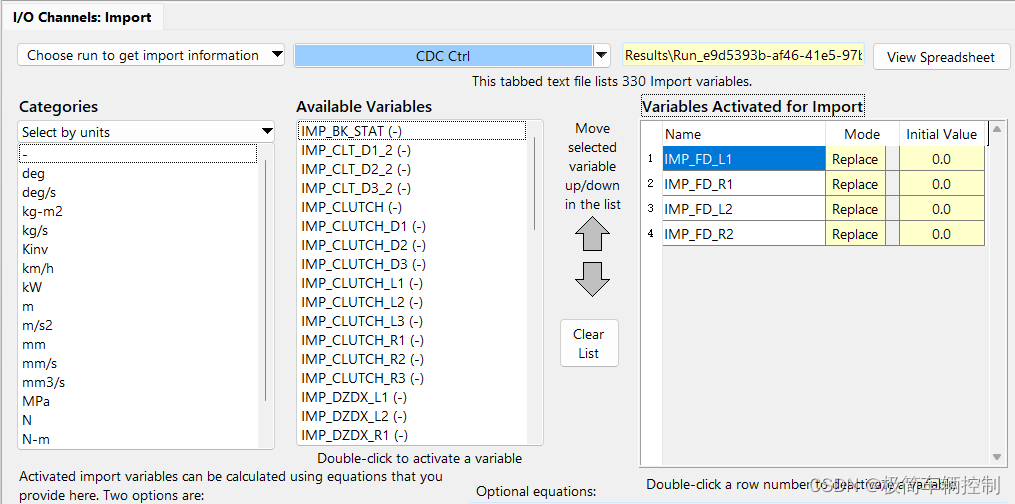
simulink信号输入到carsim整车模型
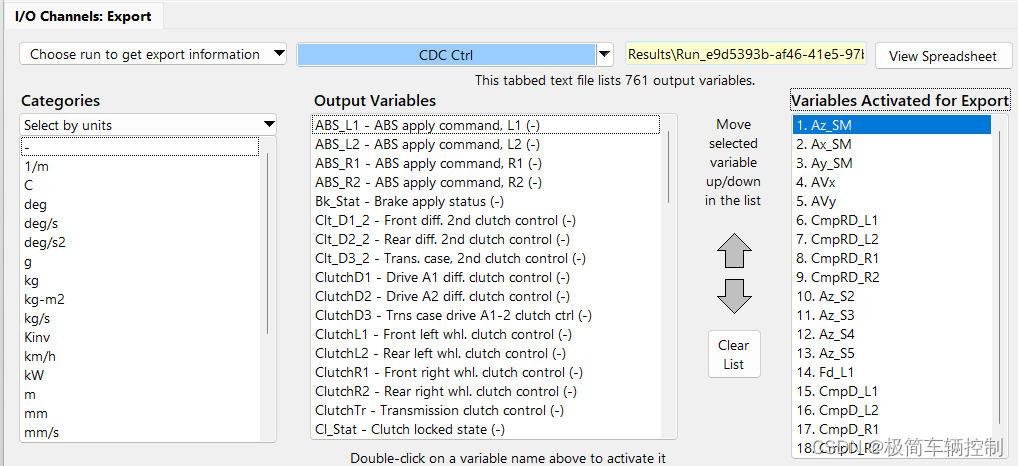
carsim整车模型输出信号到simulink
2、simulink模型
主要包括以下几个部分
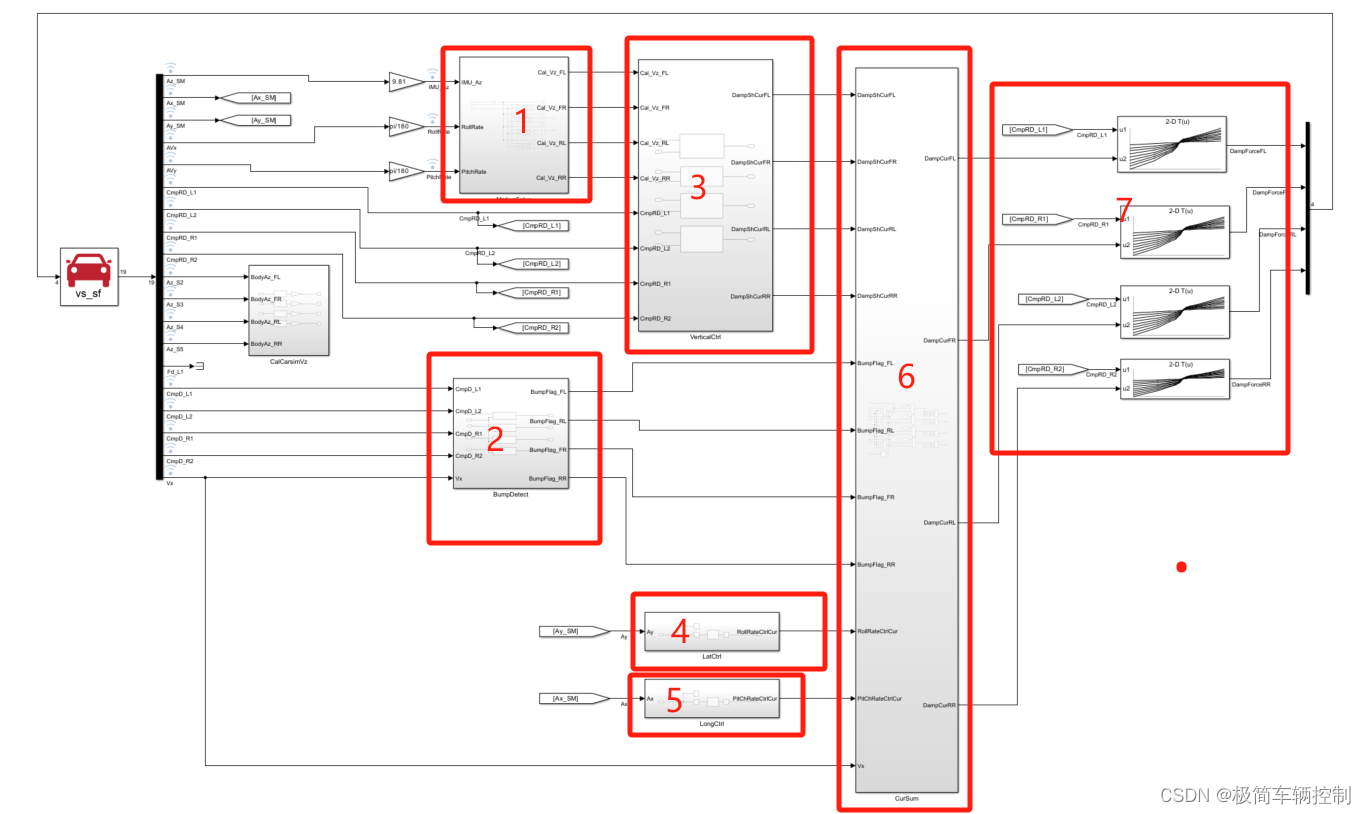
1)估算车身FL、FR、RL、RR四个位置的垂向运动速度;
2)过减速带检测;
3)天棚垂向控制;
4)侧向控制,提升侧倾性能;
5)纵向控制,提升俯仰性能;
6)综合输出;
7)模拟减振器,根据速度、电流,确定输出到carsim的阻尼力。
3、仿真结果
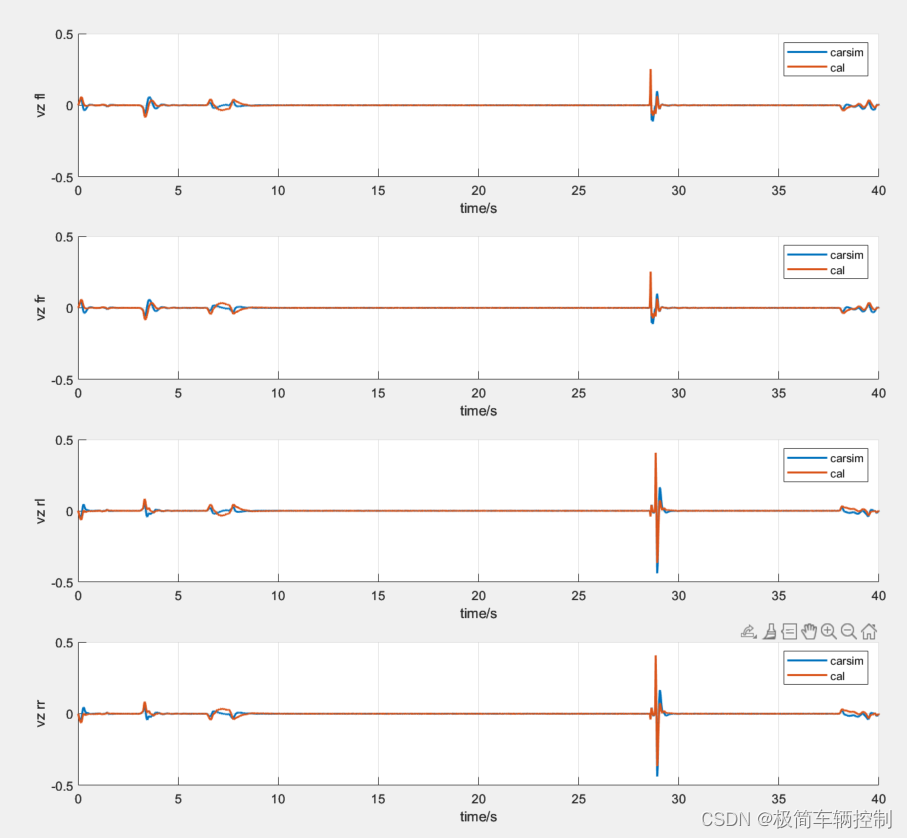
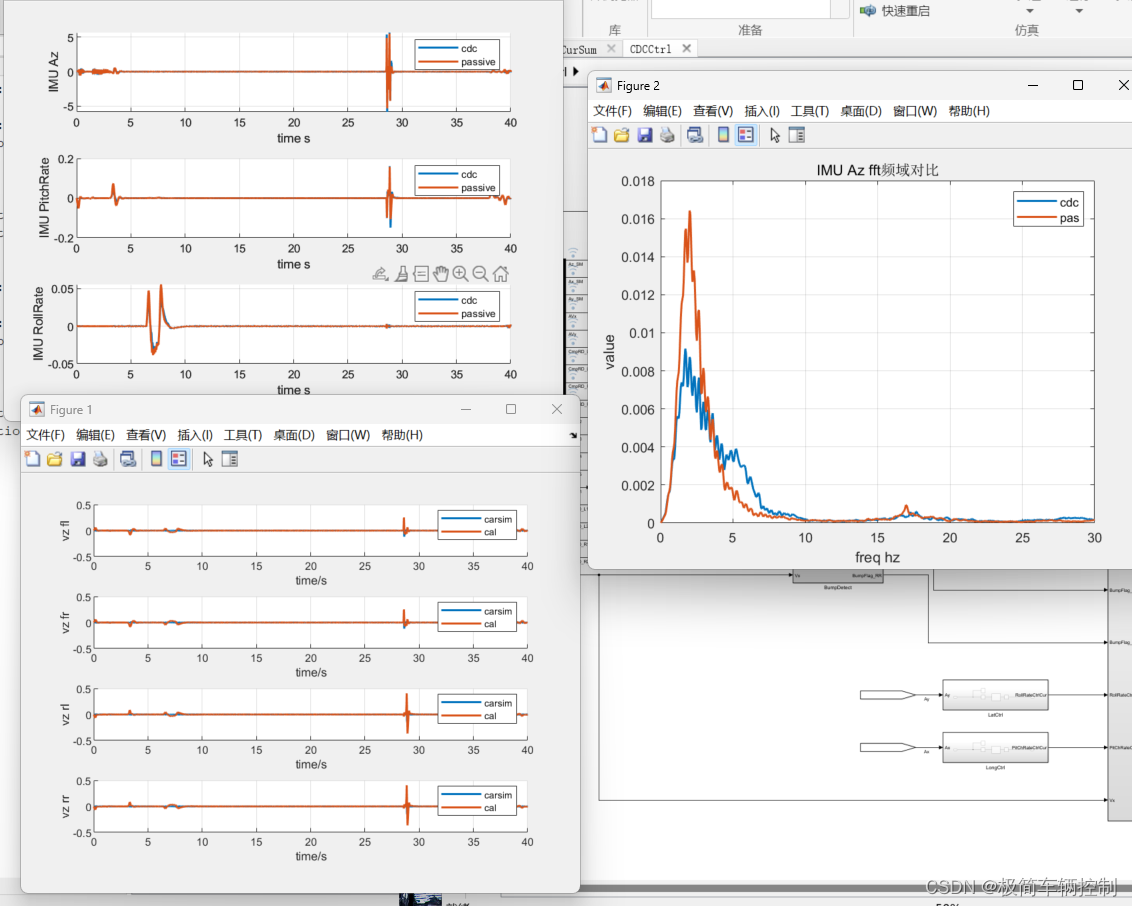
1、对比车辆运动解算结果的准确性,整体还凑合:
2、对比加入控制后,侧倾性能、纵向控制性能、过减速带时,性能都有较好提升。

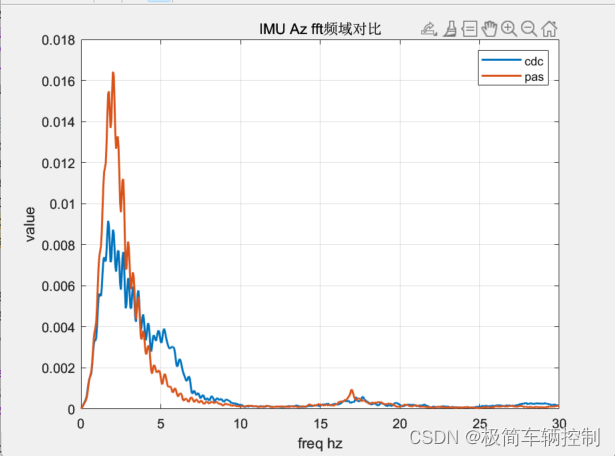
3、对比加入控制后,水平粗糙路面上,滤振效果。均方根值上有所提升。

在1.5Hz左右的车身工作频率处,有加控制的表现明显优于常规配置。
四、关于模型
关键步骤在此博客及之前博客中已经给出,如果还有老铁仍需要源码及源模型,仍然可从某宝店铺 极简车辆控制 中获得。
包含以下几个文件:

取得以上文件后,进行仿真,参照以下步骤。
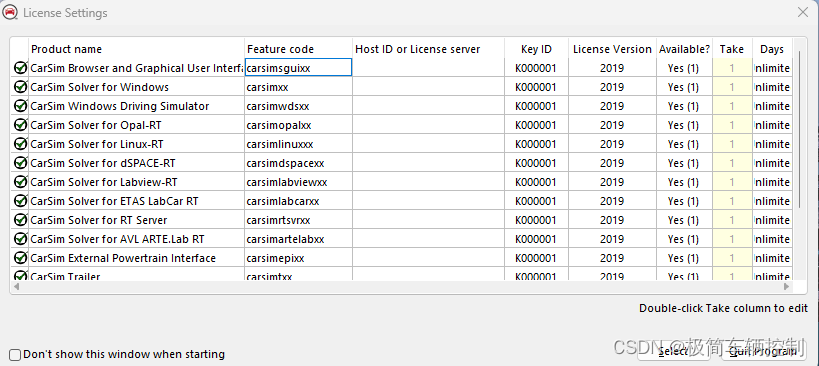
1、双击carsim图标,打开carsim,选择红框中的按钮,并continue;
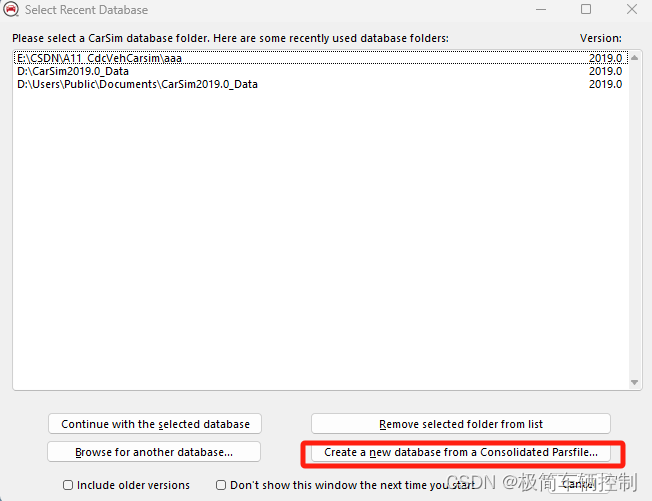

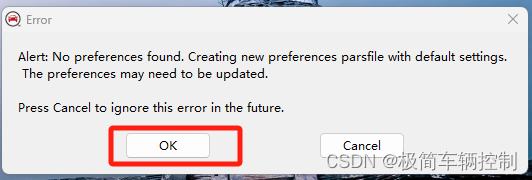
2、选择文件夹中的CDC_Ctrl.cpar文件,并按照提示,创建一个文件夹,用于存放carsim工程,在接下来的对话框中,直接按照默认的第一个,点击select,出现进度条,导入完成后,会弹出carsim界面。
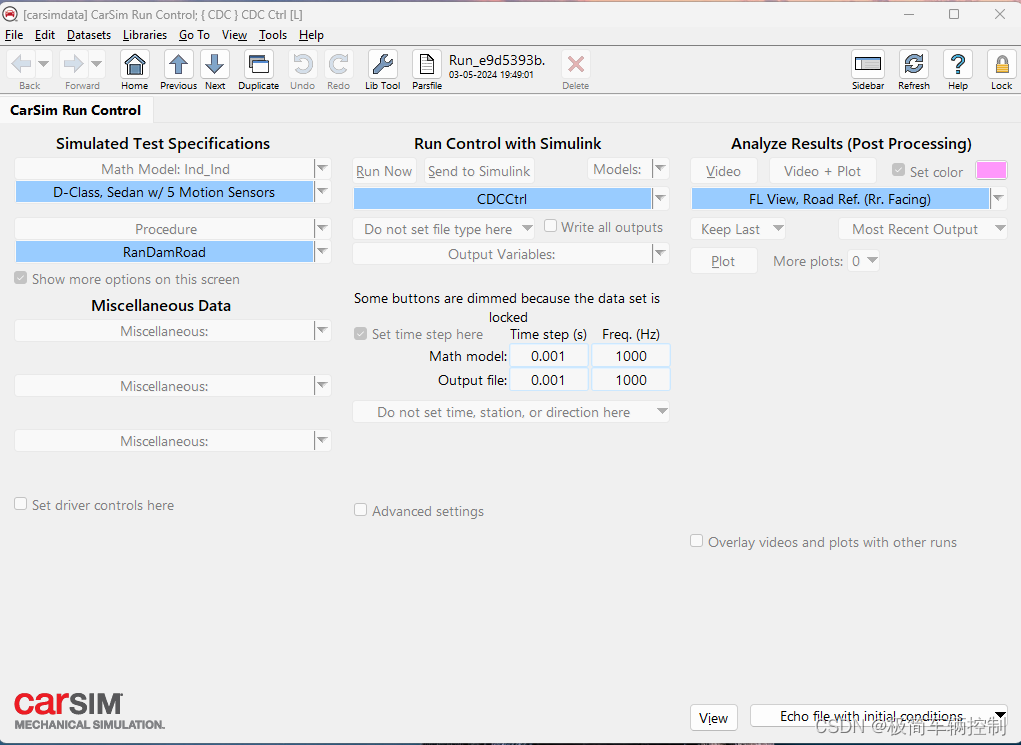
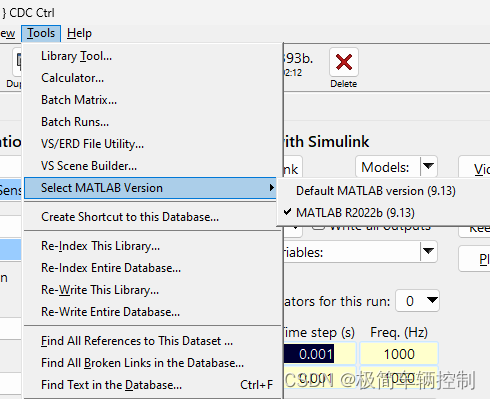
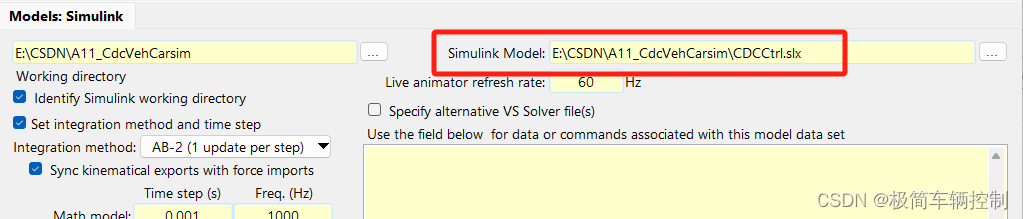
3、更改simulink模型路径,
先解锁,再点击simlink模型名称,蓝色位置。

在这个界面中,同样需要先解锁,然后把这两个路径设置到存放simulink模型的位置。

4、点击home,返回主界面,点击Send to Simulink,可以打开matlab,并打开simulink模型。
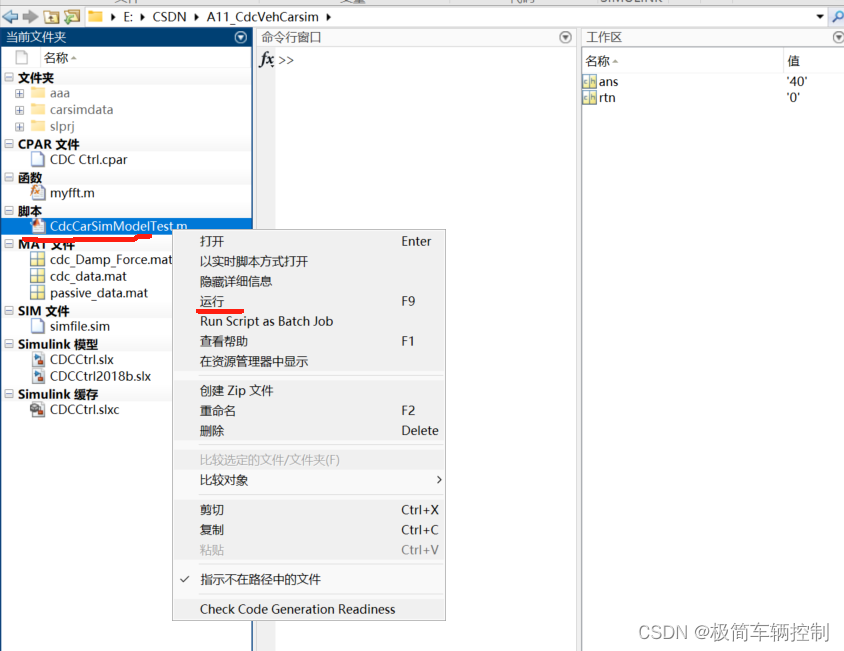
5、运行脚本,运行仿真。脚本里包含了运行simulink模型的命令,simulink模型与carsim关联,会一起运行。运行完后,能看到上文中展示的结果图片。
6、点击carsim中的video,可以看仿真录像。


7、仿真环境
博主用的是carsim 2019+matlab2022b版本。
carsim建议用2019版本,下载及按照过程可参照b站链接:
最新!Carsim2019详细安装教程【附安装包】_哔哩哔哩_bilibili
如果你的matlab不是2022b版本,注意核对下carsim工程中这个matlab版本选项。
同时,这里选择另存的2018b版本模型。















 162
162











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











