






宇树机械狗及二次开发


-
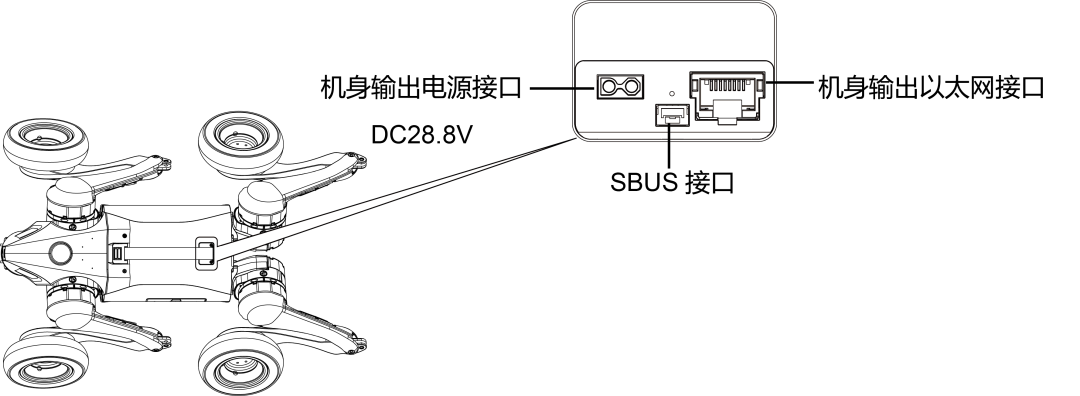
电源接口
DC 28.8V输出,连接Orin NX 16GB高算力模组BAT输入。
-
以太网接口
标准RJ45接口,连接User PC/Orin NX 16GB,RJ45以太网接口。
-
SBUS接口
用于通用遥控器上的通讯连接,此接口不提供电源输出,接口定义(从左往右边):NC/GND/SBUS。
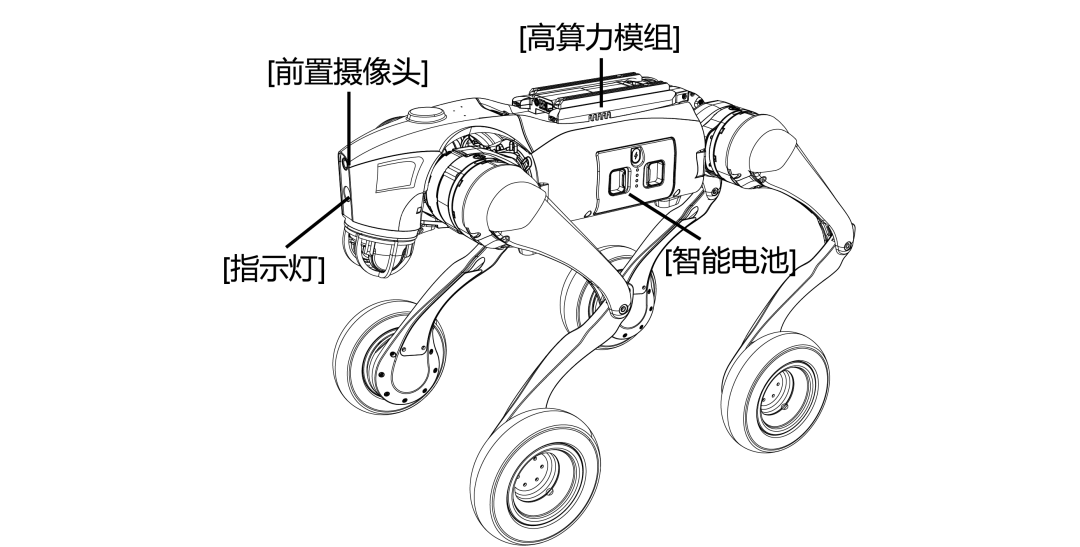
摄像头
头部相机支持720p,25fps, 180p,25fps双码流,摄像头具有1080P(HD) 30fps或720p 60fps高清拍摄能力,通光孔径F2.2,视场角120°。可进行App高清图传,在无干扰无遮挡环境下,摄像头可以保证流畅的720p 60fps高清图传。
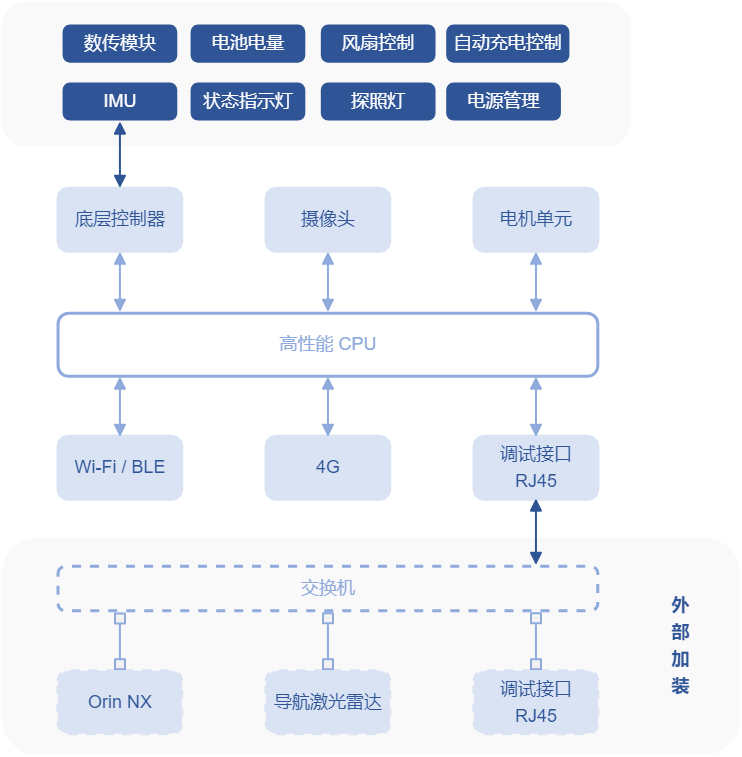
系统架构图
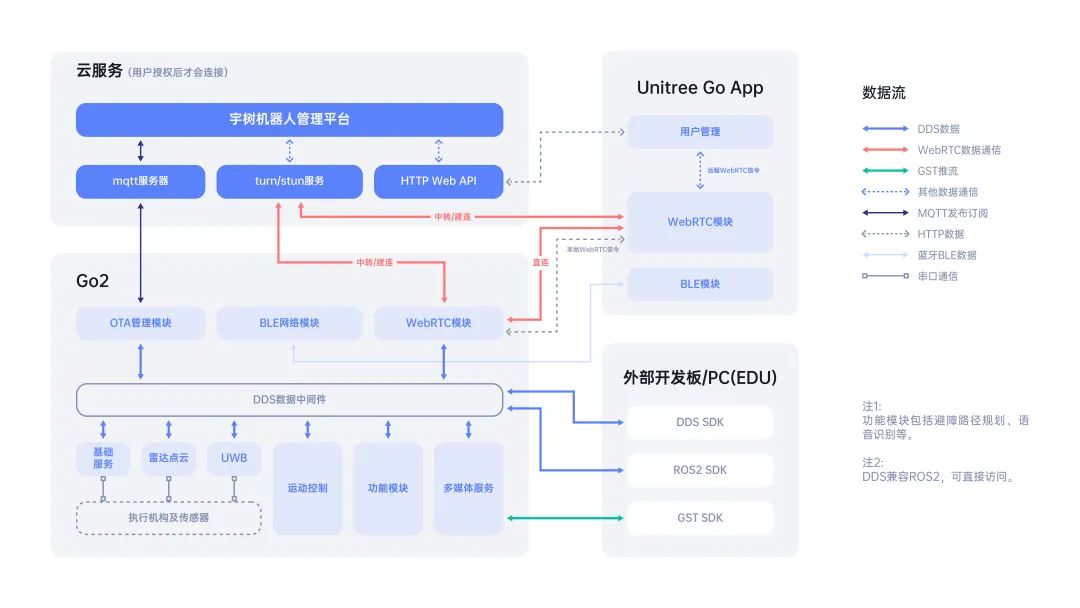
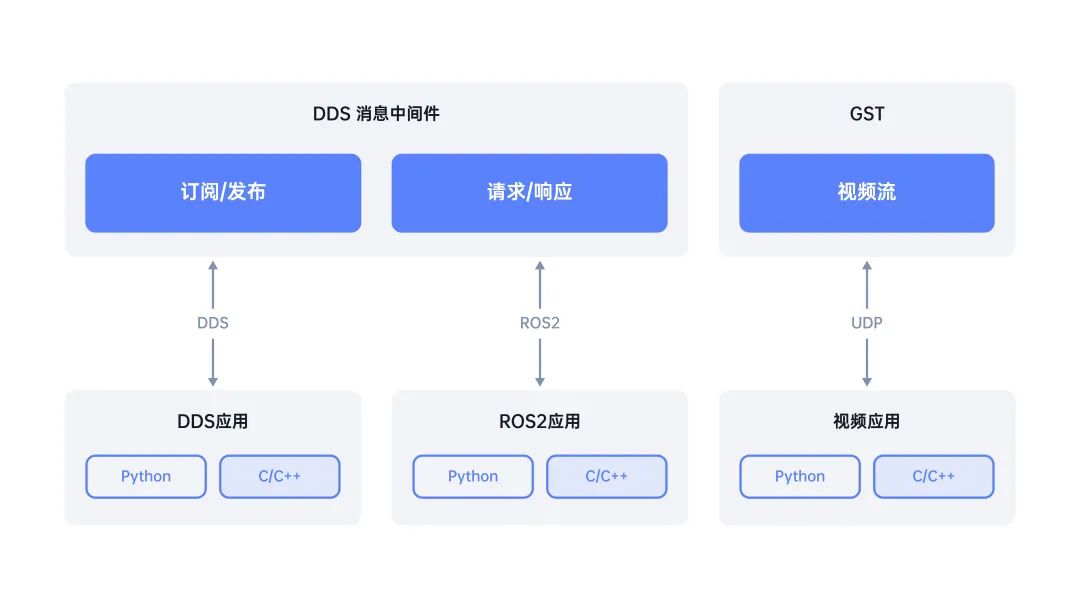
机器狗服务
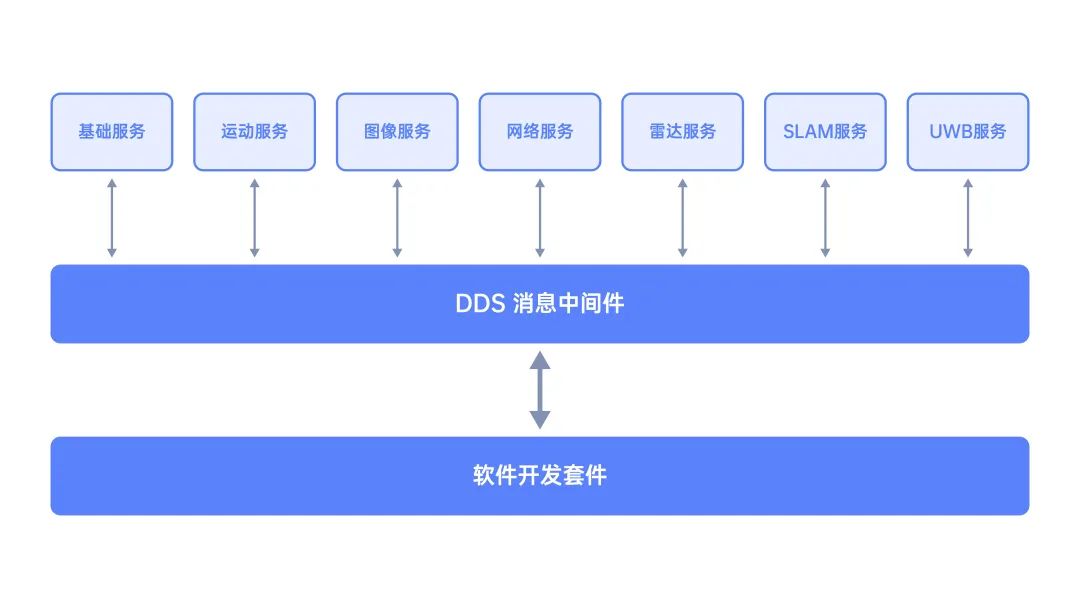
机器狗通过DDS消息中间件提供了以下服务:
-
基础服务
获取机器狗的实时运行数据包括:电池、电机、IMU等。同时提供底层控制接口(直接驱动电机控制步态)
-
运动服务
从宏观上控制机器狗的运动,具备切换步态、控制姿势及速度、进行特技表演或跳舞等功能。
-
图像服务
拍照,图像推流等功能
-
网络服务
查看 4G 物联网卡信息,配置 Wi-Fi、AP 和 STA模式。
-
雷达服务
获取点云数据和IMU数据,构建高度地图和3D体素地图。
-
SLAM服务
分为建图、定位和导航三部分,其中建图用于生成用于重定位的当前环境地图,定位确定机器人于当前环境中的位姿,导航模块则根据定位结果以及相对于目标点的偏差自动规划出到达目标点的路径。
-
UWB服务
基于自研的矢量定位模组,可实现机身平面内的厘米级定位。标签内置3轴加速度计和3轴陀螺仪 IMU,可提供标签的姿态。 主要用于Go2集成的伴随功能,也可用于用户二次开发。

















 2523
2523

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









