









1、背景
ADAS(Advanced Driber Assistant System),高级驾驶辅助系统,先进驾驶辅 助系统,作用于辅助汽车驾驶,通过感知、决策和执行,帮助驾驶员察觉可能发生的危险,是提高安全性的主动安全技术,保障行驶安全,已成当前汽车装载必备系统;并普遍认为是实现自动驾驶AD的过程性技术。技术先进、成熟稳定的ADAS HiL测试系统,可以在实验室阶段实现ADAS的各种控制功能和故障诊断功能验证,从而缩短路试时间、减少路试成本,降低路试风险。
目前,美国、欧盟、中国等相继出台严格的主动安全测试法规(Euro-NCAP、C-NCAP、ISO、NHTSA、SAE、ECE、ADSC....),对市场上各种ADAS控制器ACC、AEB、LKA、BSD、LDW、FCW等进行严格要求。
市场上ADAS传感器型号、参数、性能多种多样,不同传感器协同工作有效性难以保证;路测成本大、周期长、测试覆盖度不全面、测试危险程度高;而ADAS HiL测试系统能够实现在实验室环境下完成对ADAS控制器法规要求下的功能测试,且测试成本低,可复用性好,使用ADAS HiL测试可以有效提高研发进度,缩短上市时间,降低路试风险。
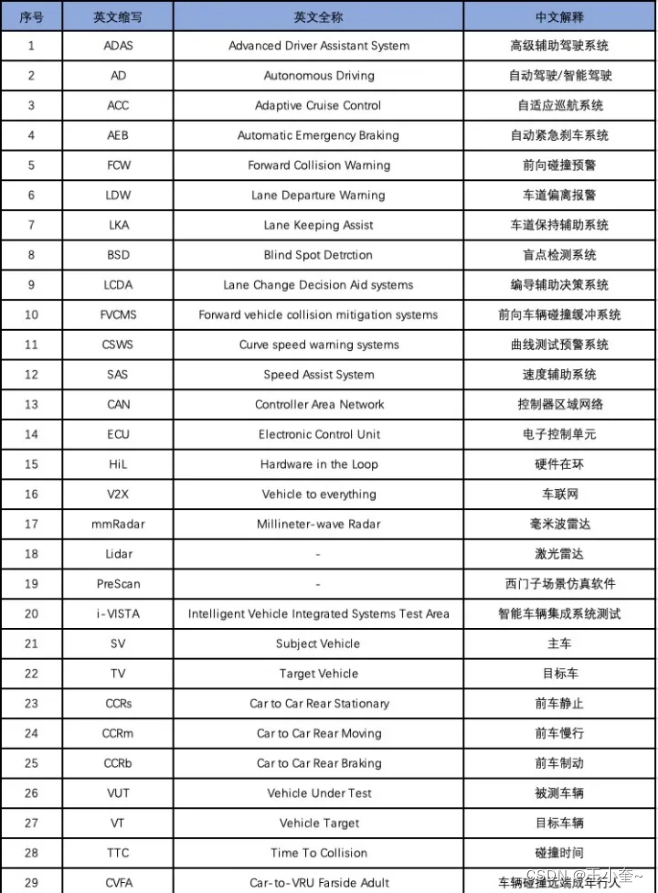
专用术语
2、方案介绍
ADAS HiL测试系统方案主要由两部分组成:硬件平台和软件平台。
硬件平台主要用于搭建完整可靠的电气系统架构,主要包括机柜、摄像头测试暗箱、高性能工作站、实时系统、通讯板卡、驾驶模拟器、路由器、显示器等。
软件平台主要用于搭建ADAS测试场景以及实时监测输入输出状态的HMI界面,包含场景软件、试验管理软件、车辆动力学模型、传感器模型,试验管理软件负责测试实验管理,场景模型与车辆动力学模型集成,实现对ADAS控制器的仿真测试。
2.1系统方案——测试对象
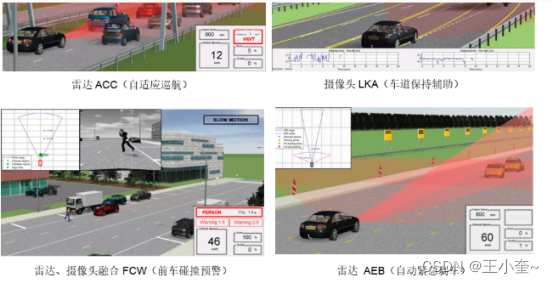
ADAS控制器,包括ACC、AEB、FCW、BSD、LKA、LDW、TSR、PA等
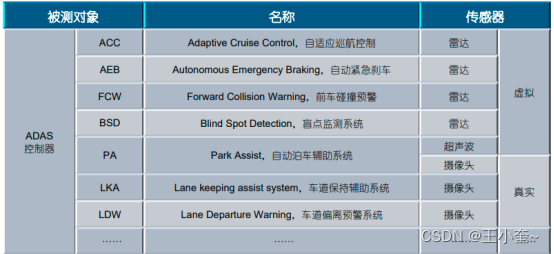
ADAS控制器测试对象
2.2系统方案——测试功能
提供虚拟测试环境,实现不同工况下ADAS控制器的功能验证;
多种物理传感器模型精准识别场景中目标形状、距离、相对速度及方 位角等参数;
高精度地图数据导入,模拟真实路况测试;
标准测试工况快速建立,复杂交通流可自定义;
其他测试:
- MIL——扩展用于ADAS控制算法MIL测试;
- DIL——集成驾驶模拟器或驾驶座舱用于驾驶员在环测试;
- 系统级测试——联合真实雷达和激光雷达用于传感器融合测试;
- V2X测试——具有V2X传感器用于自动驾驶前瞻性研究测试;

2.3 系统方案——系统架构
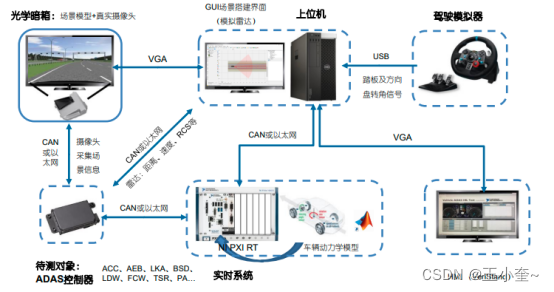
ADAS系统架构
2.4系统组成
测试系统包含两个方面:硬件系统和软件系统
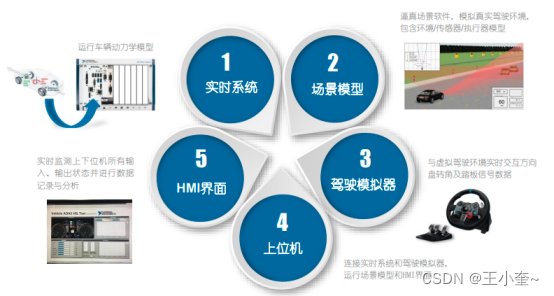
硬件系统主要包括以下几个方面:
1)实时系统:运行车辆动力学模型,接收上位机发送方向盘转角信号、踏板信号数据,与被测对象实时进行通讯交互;
2)上位机:连接实时系统和驾驶模拟器,运行场景模型和HMI界面;
3)摄像头光学暗箱:提供摄像头采集视频流信息数据环境,防止外界干扰;
4)毫米波仿真暗箱:提供毫米波雷达接收和发射毫米波环境,防止外界干扰;
5)VRTS系统:模拟毫米波雷达目标;
6)驾驶模拟器:与虚拟驾驶环境实时交互方向盘转角及踏板信号数据。
软件系统包括 :
1)三维虚拟场景模型软件:用于模拟虚拟驾驶环境,包含环境模型、传感器模型和执行器模型。其中包括道路模型(支持Open Street Map、openDRIVE、underlay、GPS跟踪倒入)、设施模型(车道线、斑马线、道路标志等)、移动物件、气象条件模型(光线强弱、雨雪雾天等)等;传感器模型包含摄像头(鱼眼、单目及双目)、毫米波雷达、超声波雷达、激光雷达、理想传感器、真值传感器等;执行器模型包含轿车、摩托车、商用车、行人、自行车等。
2)HMI软件:人机交互界面软件,通过该界面发送接收指令信号,实时监测上下位机所有输入、输出状态并进行数据记录与分析;
3)动力学模型:基于Matlab/Simulink进行搭建或使用商业化模型,提供完整的车辆动力学模型,提高仿真精度。
2.5 测试方法
该测试系统以ADAS控制器为待测对象,将真实摄像头、真实毫米波雷达和真实超声波雷达分别放在摄像头光学暗箱、毫米波雷达仿真暗箱和超声波雷达仿真暗箱中,使用场景软件模拟真实道路场景,驾驶模拟器与虚拟驾驶环境实时交互方向盘转角及踏板信号数据,实时系统承载仿真动力学模型,通过试验管理软件把ADAS控制器、传感器数据以及仿真动力学模型进行交互,实时监测上下位机的输入输出状态,检测ADAS控制器的功能。
摄像头光学暗箱测试:ADAS摄像头HiL测试系统以基于摄像头的ADAS控制器为待测对象,将真实摄像头放在摄像头光学暗箱中,正对着光学暗箱中的显示器,其中摄像头固定在三自由度十字滑台上方便调节摄像头上下、左右、前后位置,使摄像头与显示器中心在一条直线上。根据待测摄像头焦距,可选择透镜方案。显示器上显示的是测试用的测试场景,测试场景有两种获得方式:一种是使用场景软件模拟真实道路场景,还有一种是播放道路测试时真实摄像头采集的场景视频。测试场景运行在摄像头光学暗箱的显示屏,真实摄像头捕捉显示屏中场景的变化,摄像头将视频信息直接传递ADAS控制器,ADAS控制器根据视频信息作出相应判断,通过CAN、以太网或其他信息输出这些判断。基于上述测试方法,可实现以下两种测试功能:1)开环测试,通过已有的标准过的测试集来进行识别算法的开环检验;2)闭环测试,通过加入实时系统,配合场景和车辆模型,根据搭建的不同的测试场景,进行基于摄像头的ADAS控制器HiL硬件在环仿真测试。
毫米波雷达回波模拟测试:场景软件模拟雷达模型并输出模拟目标信号(距离、速度、方位角等),雷达目标模拟器接收雷达模型的目标信号,通过模拟射频延迟信号的方式模拟雷达模型的目标信号,并将该信号以毫米波雷达的形式发射出去,真实雷达通过OTA形式接收延迟的毫米波信号,实现回波模拟。使用雷达回波模拟测试,可实现基于真实雷达在环的开环测试和闭环测试。
激光雷达点云模拟测试:场景软件模拟激光点云传感器,能够输出高精度的激光雷达点云数据。可以通过激光雷达传输协议,提取仿真输出的激光雷达点云数据进行打包,然后通过以太网传给ADAS控制器。本方法可实现基于激光雷达的开环目标感知能力检验和闭环的硬件在环系统功能测试。
2.5测试功能
1)集成道路仿真环境,实现不同工况下的ADAS的功能验证;
2)集成多种和多个传感器模型,支持多种复杂智能驾驶汽车功能测试;
3)集成雷达目标模拟器,实现真实雷达在环功能测试;
4)集成摄像头暗箱,实现车载摄像头在环功能测试;
5)集成高精度地图数据导入,模拟真实路况测试;
6)集成多种测试场景,构建测试评价体系;
7)支持毫米波雷达参数测试;
8)支持V2X集成测试;
9)支持定制化测试场景快速开发;
3、硬件平台
本文章方案硬件平台基于NI系统平台进行搭建。系统硬件包含用于部署动力学模型/控制器模型的PXI实时控制器、实现CAN通讯的PXI通讯板卡,及系统机箱。
高性能工作站,主要用于运行场景软件及人机交互界面监控软件。
摄像头光学暗箱:主要提供摄像头采集场景信息的密闭空间。
毫米波仿真暗箱:提供毫米波雷达接收和发送毫米波环境,防止外界干扰;
超声波仿真暗箱:提供超声波雷达接收和发射超声波环境,防止外界干扰;
VRTS系统:模拟毫米波雷达目标;
驾驶模拟器:用于驾驶员在环测试,向PC上位机提供踏板和方向盘转角信号;
4、软件平台
4.1、场景软件
场景软件目前行业内多使用PreScan及VTD进行场景仿真模拟,本文以PreScan进行介绍。PreScan是一个专业的ADAS场景搭建软件,它由多个模块组成,这些模块可以满足ADAS系统的开发和测试需求。直观的图形用户界面(GUI)用于创建场景和传感器建模,工程师无需软件工程经验,可快速搭建测试场景。

场景软件模型
环境模型:
路面及路边设施数据库、交通标志数据库、建筑物、绿化带数据库、用户自定义3D模型导入、天气光照、车灯路灯。
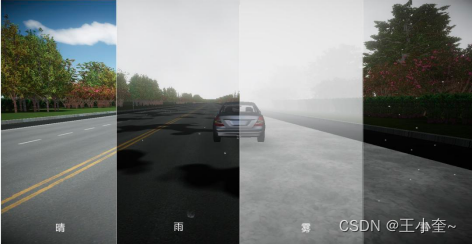
天气模型


道路模型
传感器模型:
摄像头、雷达、车道线、目标传感器等;


目标传感器
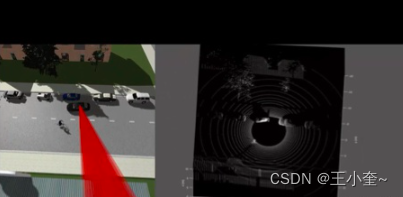
毫米波激光雷达

摄像头模型
执行器模型:
行人、自行车、商用车、摩托车;
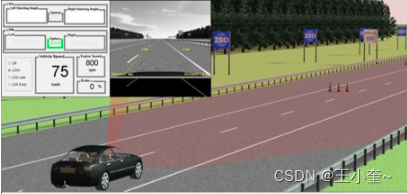
测试场景
标准测试场景:
LDW (ISO、NHTSA)

ACC (ISO)
测试场景
复杂测试场景:
场景模型
定制测试场景:

公交/限速路口

高架/十字路口

太阳光/路灯
4.2、实验管理软件
实验管理软件基于VeriStand软件 平台进行开发,主要用于监控运行在实时机中车辆模型的输入输出接口以及总线的CAN报文输出。VeriStand用于更有效地创建测试应用(如硬件在环仿真)。它以简单易用的形式提供用于实时测试应用的常用功能,用户无需编程,从而降低了开发成本和风险。使用上位机软件无需具备编程知识,但是用户可以使用各种软件环境,如LabBIEW、MathWorks公司的Simulink软件、ANSI C/C++等建模和编程,实现顶制和扩展。
4.3动力学模型软件
整车实时仿真模型为HiL系统提供完整的虚拟车辆环境。
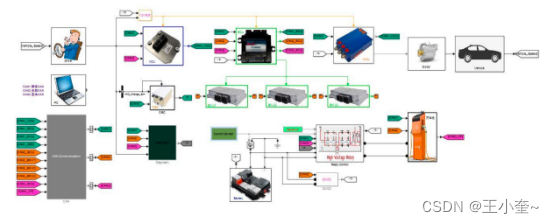
动力学模型软件
5、测试场景库
5.1、ACC试验工况示例
ACC(Adaptive Cruise Control),自适应巡航控制系统是一种智能化的自动控制系统,他是在早已存在的巡航控制技术的基础上发展而来的。在车辆城市过程中,安装在车辆前部的车距传感器(雷达)持续扫描车辆前方道路,轮速传感器采集车速信号。当与前车之间的距离过小时,ACC控制单元 可以通过与制动防抱死系统、发动机控制系统协调动作,使车轮适当制动,并使发动机的输出功率下降,以使车辆与前方车辆始终保持安全距离。自适应巡航控制系统在控制车辆制动时,通常会将制动减速度限制在不影响舒适度的程度,当需要更大减速度时,ACC控制单元会发出声光信号通知驾驶者主动采取制动操作。当与前车之间的距离增加到安全距离时,ACC控制单元控制车辆按照设定的车速行驶。
ACC试验场景包扩目标车静止、目标车低速、目标车减速、横向重叠共4个场景,针对每个试验场景,包括体验和安全两个维度。目标车静止场景主车车速分别为30Km/h、40Km/h、50Km/h和60Km/h、目标车速低速场景主车车速分别为90Km/h、100Km/h、110Km/h和120Km/h、目标车速减速场景目标车车速为70Km/h,分别以-3m/s和-4m/s2的减速度制动到停止,这三个工况主要考察ACC的减速能力。横向重叠场景的重叠率分别为正负50%,考察ACC的目标识别能力。
以主车1的车宽为基准,目标车2与主车1横向重叠的部分除以主车1宽度得到横向重叠率(不计算外后视镜的宽度)。以主车1的中心线为参考线,当目标车2的中心线位于主车1的中心线右侧时,横向重叠率为负值;当目标车2的中心线位于主车1的中心线左侧时,横向重叠率为正值。
6、总结
技术先进、成熟稳定的ADAS HiL测试系统,可以在实验室阶段实现ADAS的各种控制功能和故障诊断功能验证,从而缩短路试时间、减少路试成本,降低路试风险,是ADAS测试的重要一环,也是整车企业核心岗位之一。














 1300
1300











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









