







<span style="font-size:18px;">#
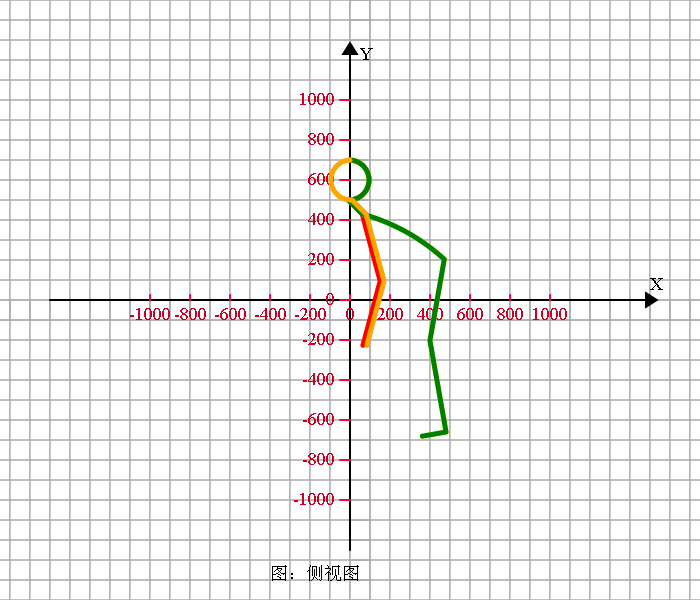
#立式<1>
$curvePath_165 = [[[0, 0], [2.0, -0.04], [11.93, -1.24], [21.69, -3.42], [31.18, -6.57], [40.31, -10.65], [48.99, -15.62], [57.13, -21.43], [64.65, -28.02], [71.47, -35.33], [77.53, -43.29], [82.76, -51.81], [87.12, -60.81], [90.56, -70.2], [93.04, -79.89], [94.54, -89.78], [95.05, -99.77], [94.56, -109.76], [93.07, -119.65], [90.6, -129.34], [87.18, -138.74], [82.84, -147.75], [77.62, -156.28], [71.57, -164.25], [64.76, -171.57], [57.25, -178.18], [49.12, -184.0], [40.45, -188.98], [31.33, -193.07], [21.84, -196.23], [12.08, -198.43], [2.15, -199.64], [-9.85, -199.66], [-9.85, -199.66], [60.97, -270.26], [60.97, -270.26], [150.78, -605.44], [150.78, -605.44], [90.73, -829.53], [90.73, -829.53], [64.85, -926.12]], [[0, 0], [-2.0, -0.04], [-11.93, -1.24], [-21.69, -3.42], [-31.18, -6.57], [-40.31, -10.65], [-48.99, -15.62], [-57.13, -21.43], [-64.65, -28.02], [-71.47, -35.33], [-77.53, -43.29], [-82.76, -51.81], [-87.12, -60.81], [-90.56, -70.2], [-93.04, -79.89], [-94.54, -89.78], [-95.05, -99.77], [-94.56, -109.76], [-93.07, -119.65], [-90.6, -129.34], [-87.18, -138.74], [-82.84, -147.75], [-77.62, -156.28], [-71.57, -164.25], [-64.76, -171.57], [-57.25, -178.18], [-49.12, -184.0], [-40.45, -188.98], [-31.33, -193.07], [-21.84, -196.23], [-12.08, -198.43], [-2.15, -199.64], [9.85, -199.66], [9.85, -199.66], [80.45, -270.48], [80.45, -270.48], [170.26, -605.66], [170.26, -605.66], [110.21, -829.75], [110.21, -829.75], [84.33, -926.34]], [[0, 0], [2.0, -0.04], [11.93, -1.24], [21.69, -3.42], [31.18, -6.57], [40.31, -10.65], [48.99, -15.62], [57.13, -21.43], [64.65, -28.02], [71.47, -35.33], [77.53, -43.29], [82.76, -51.81], [87.12, -60.81], [90.56, -70.2], [93.04, -79.89], [94.54, -89.78], [95.05, -99.77], [94.56, -109.76], [93.07, -119.65], [90.6, -129.34], [87.18, -138.74], [82.84, -147.75], [77.62, -156.28], [71.57, -164.25], [64.76, -171.57], [57.25, -178.18], [49.12, -184.0], [40.45, -188.98], [31.33, -193.07], [21.84, -196.23], [12.08, -198.43], [2.15, -199.64], [-9.85, -199.66], [-9.85, -199.66], [60.97, -270.26], [60.97, -270.26], [62.42, -270.65], [72.05, -273.35], [81.65, -276.15], [91.22, -279.04], [100.76, -282.03], [110.27, -285.11], [119.75, -288.29], [129.2, -291.56], [138.62, -294.93], [148.0, -298.39], [157.35, -301.94], [166.66, -305.59], [175.93, -309.33], [185.17, -313.16], [194.37, -317.08], [203.53, -321.1], [212.65, -325.21], [221.73, -329.41], [230.76, -333.7], [239.75, -338.08], [248.7, -342.55], [257.6, -347.11], [266.45, -351.76], [275.26, -356.5], [284.02, -361.32], [292.73, -366.23], [301.39, -371.23], [310.0, -376.31], [318.56, -381.48], [327.07, -386.73], [335.52, -392.07], [343.92, -397.49], [352.27, -403.0], [360.56, -408.59], [368.79, -414.26], [376.97, -420.02], [385.09, -425.86], [393.15, -431.78], [401.15, -437.78], [409.09, -443.86], [416.97, -450.02], [424.79, -456.26], [432.54, -462.57], [440.23, -468.96], [447.86, -475.43], [455.42, -481.97], [462.92, -488.59], [471.45, -496.3], [471.45, -496.3], [399.73, -903.03], [399.73, -903.03], [480.3, -1359.98], [480.3, -1359.98], [362.12, -1380.82]], [[0, 0], [2.0, -0.04], [11.93, -1.24], [21.69, -3.42], [31.18, -6.57], [40.31, -10.65], [48.99, -15.62], [57.13, -21.43], [64.65, -28.02], [71.47, -35.33], [77.53, -43.29], [82.76, -51.81], [87.12, -60.81], [90.56, -70.2], [93.04, -79.89], [94.54, -89.78], [95.05, -99.77], [94.56, -109.76], [93.07, -119.65], [90.6, -129.34], [87.18, -138.74], [82.84, -147.75], [77.62, -156.28], [71.57, -164.25], [64.76, -171.57], [57.25, -178.18], [49.12, -184.0], [40.45, -188.98], [31.33, -193.07], [21.84, -196.23], [12.08, -198.43], [2.15, -199.64], [-9.85, -199.66], [-9.85, -199.66], [60.97, -270.26], [60.97, -270.26], [62.42, -270.65], [72.05, -273.35], [81.65, -276.15], [91.22, -279.04], [100.76, -282.03], [110.27, -285.11], [119.75, -288.29], [129.2, -291.56], [138.62, -294.93], [148.0, -298.39], [157.35, -301.94], [166.66, -305.59], [175.93, -309.33], [185.17, -313.16], [194.37, -317.08], [203.53, -321.1], [212.65, -325.21], [221.73, -329.41], [230.76, -333.7], [239.75, -338.08], [248.7, -342.55], [257.6, -347.11], [266.45, -351.76], [275.26, -356.5], [284.02, -361.32], [292.73, -366.23], [301.39, -371.23], [310.0, -376.31], [318.56, -381.48], [327.07, -386.73], [335.52, -392.07], [343.92, -397.49], [352.27, -403.0], [360.56, -408.59], [368.79, -414.26], [376.97, -420.02], [385.09, -425.86], [393.15, -431.78], [401.15, -437.78], [409.09, -443.86], [416.97, -450.02], [424.79, -456.26], [432.54, -462.57], [440.23, -468.96], [447.86, -475.43], [455.42, -481.97], [462.92, -488.59], [471.45, -496.3], [471.45, -496.3], [399.73, -903.03], [399.73, -903.03], [480.3, -1359.98], [480.3, -1359.98], [362.12, -1380.82]]]
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 135; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = -1/1000;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -15 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [-60, -30, 0];
RA = [-60, -30, 0];
LL = [-10, 20, -90];
RL = [-10, 20, -90];
lBigArm = LA[0]; #取值范围 20 -> 160
lSmallArm = LA[1];
lHalm = LA[2];
rBigArm = RA[0]; #取值范围 -20 -> -160
rSmallArm = RA[1];
rHalm = RA[2];
lBigLeg = LL[0]; #取值范围 -10 -> -120
lSmallLeg = LL[1];
lFoot = LL[2];
rBigLeg = RL[0]; #取值范围 10 -> 120
rSmallLeg = RL[1];
rFoot = RL[2];
#长度投影系数
proj_lBigArm = 1 * cos_(0);
proj_lSmallArm = 1 * cos_(0);
proj_lHalm = 1;
proj_rBigArm = 1 * cos_(0);
proj_rSmallArm = 1 * cos_(0);
proj_rHalm = 1;
proj_lBigLeg = 1 * cos_(0);
proj_lSmallLeg = 1 * cos_(0);
proj_lFoot = 1 * cos_(0);
proj_rBigLeg = 1 * cos_(0);
proj_rSmallLeg = 1 * cos_(0);
proj_rFoot = 1 * cos_(0);
#</span>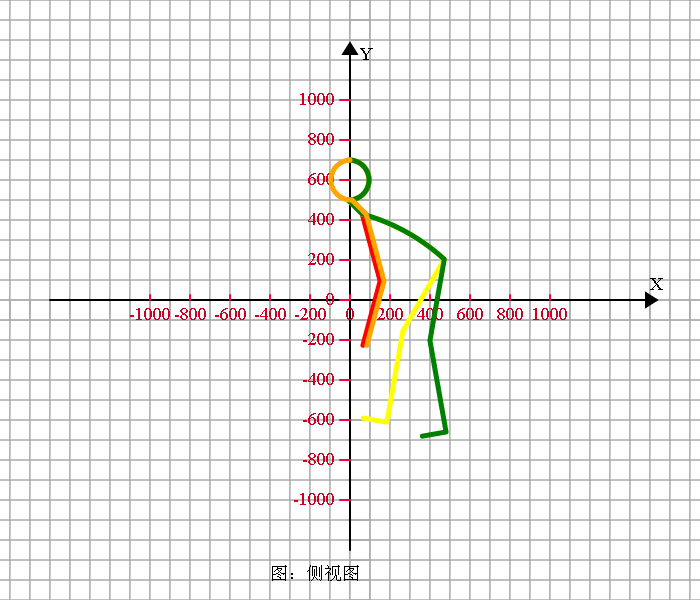
<span style="font-size:18px;">#
#立式<2>
$curvePath_165 = [[[0, 0], [2.0, -0.04], [11.93, -1.24], [21.69, -3.42], [31.18, -6.57], [40.31, -10.65], [48.99, -15.62], [57.13, -21.43], [64.65, -28.02], [71.47, -35.33], [77.53, -43.29], [82.76, -51.81], [87.12, -60.81], [90.56, -70.2], [93.04, -79.89], [94.54, -89.78], [95.05, -99.77], [94.56, -109.76], [93.07, -119.65], [90.6, -129.34], [87.18, -138.74], [82.84, -147.75], [77.62, -156.28], [71.57, -164.25], [64.76, -171.57], [57.25, -178.18], [49.12, -184.0], [40.45, -188.98], [31.33, -193.07], [21.84, -196.23], [12.08, -198.43], [2.15, -199.64], [-9.85, -199.66], [-9.85, -199.66], [60.97, -270.26], [60.97, -270.26], [150.78, -605.44], [150.78, -605.44], [90.73, -829.53], [90.73, -829.53], [64.85, -926.12]], [[0, 0], [-2.0, -0.04], [-11.93, -1.24], [-21.69, -3.42], [-31.18, -6.57], [-40.31, -10.65], [-48.99, -15.62], [-57.13, -21.43], [-64.65, -28.02], [-71.47, -35.33], [-77.53, -43.29], [-82.76, -51.81], [-87.12, -60.81], [-90.56, -70.2], [-93.04, -79.89], [-94.54, -89.78], [-95.05, -99.77], [-94.56, -109.76], [-93.07, -119.65], [-90.6, -129.34], [-87.18, -138.74], [-82.84, -147.75], [-77.62, -156.28], [-71.57, -164.25], [-64.76, -171.57], [-57.25, -178.18], [-49.12, -184.0], [-40.45, -188.98], [-31.33, -193.07], [-21.84, -196.23], [-12.08, -198.43], [-2.15, -199.64], [9.85, -199.66], [9.85, -199.66], [80.45, -270.48], [80.45, -270.48], [170.26, -605.66], [170.26, -605.66], [110.21, -829.75], [110.21, -829.75], [84.33, -926.34]], [[0, 0], [2.0, -0.04], [11.93, -1.24], [21.69, -3.42], [31.18, -6.57], [40.31, -10.65], [48.99, -15.62], [57.13, -21.43], [64.65, -28.02], [71.47, -35.33], [77.53, -43.29], [82.76, -51.81], [87.12, -60.81], [90.56, -70.2], [93.04, -79.89], [94.54, -89.78], [95.05, -99.77], [94.56, -109.76], [93.07, -119.65], [90.6, -129.34], [87.18, -138.74], [82.84, -147.75], [77.62, -156.28], [71.57, -164.25], [64.76, -171.57], [57.25, -178.18], [49.12, -184.0], [40.45, -188.98], [31.33, -193.07], [21.84, -196.23], [12.08, -198.43], [2.15, -199.64], [-9.85, -199.66], [-9.85, -199.66], [60.97, -270.26], [60.97, -270.26], [62.42, -270.65], [72.05, -273.35], [81.65, -276.15], [91.22, -279.04], [100.76, -282.03], [110.27, -285.11], [119.75, -288.29], [129.2, -291.56], [138.62, -294.93], [148.0, -298.39], [157.35, -301.94], [166.66, -305.59], [175.93, -309.33], [185.17, -313.16], [194.37, -317.08], [203.53, -321.1], [212.65, -325.21], [221.73, -329.41], [230.76, -333.7], [239.75, -338.08], [248.7, -342.55], [257.6, -347.11], [266.45, -351.76], [275.26, -356.5], [284.02, -361.32], [292.73, -366.23], [301.39, -371.23], [310.0, -376.31], [318.56, -381.48], [327.07, -386.73], [335.52, -392.07], [343.92, -397.49], [352.27, -403.0], [360.56, -408.59], [368.79, -414.26], [376.97, -420.02], [385.09, -425.86], [393.15, -431.78], [401.15, -437.78], [409.09, -443.86], [416.97, -450.02], [424.79, -456.26], [432.54, -462.57], [440.23, -468.96], [447.86, -475.43], [455.42, -481.97], [462.92, -488.59], [471.45, -496.3], [471.45, -496.3], [264.95, -853.97], [264.95, -853.97], [184.38, -1310.92], [184.38, -1310.92], [66.2, -1290.08]], [[0, 0], [2.0, -0.04], [11.93, -1.24], [21.69, -3.42], [31.18, -6.57], [40.31, -10.65], [48.99, -15.62], [57.13, -21.43], [64.65, -28.02], [71.47, -35.33], [77.53, -43.29], [82.76, -51.81], [87.12, -60.81], [90.56, -70.2], [93.04, -79.89], [94.54, -89.78], [95.05, -99.77], [94.56, -109.76], [93.07, -119.65], [90.6, -129.34], [87.18, -138.74], [82.84, -147.75], [77.62, -156.28], [71.57, -164.25], [64.76, -171.57], [57.25, -178.18], [49.12, -184.0], [40.45, -188.98], [31.33, -193.07], [21.84, -196.23], [12.08, -198.43], [2.15, -199.64], [-9.85, -199.66], [-9.85, -199.66], [60.97, -270.26], [60.97, -270.26], [62.42, -270.65], [72.05, -273.35], [81.65, -276.15], [91.22, -279.04], [100.76, -282.03], [110.27, -285.11], [119.75, -288.29], [129.2, -291.56], [138.62, -294.93], [148.0, -298.39], [157.35, -301.94], [166.66, -305.59], [175.93, -309.33], [185.17, -313.16], [194.37, -317.08], [203.53, -321.1], [212.65, -325.21], [221.73, -329.41], [230.76, -333.7], [239.75, -338.08], [248.7, -342.55], [257.6, -347.11], [266.45, -351.76], [275.26, -356.5], [284.02, -361.32], [292.73, -366.23], [301.39, -371.23], [310.0, -376.31], [318.56, -381.48], [327.07, -386.73], [335.52, -392.07], [343.92, -397.49], [352.27, -403.0], [360.56, -408.59], [368.79, -414.26], [376.97, -420.02], [385.09, -425.86], [393.15, -431.78], [401.15, -437.78], [409.09, -443.86], [416.97, -450.02], [424.79, -456.26], [432.54, -462.57], [440.23, -468.96], [447.86, -475.43], [455.42, -481.97], [462.92, -488.59], [471.45, -496.3], [471.45, -496.3], [399.73, -903.03], [399.73, -903.03], [480.3, -1359.98], [480.3, -1359.98], [362.12, -1380.82]]]
#</span>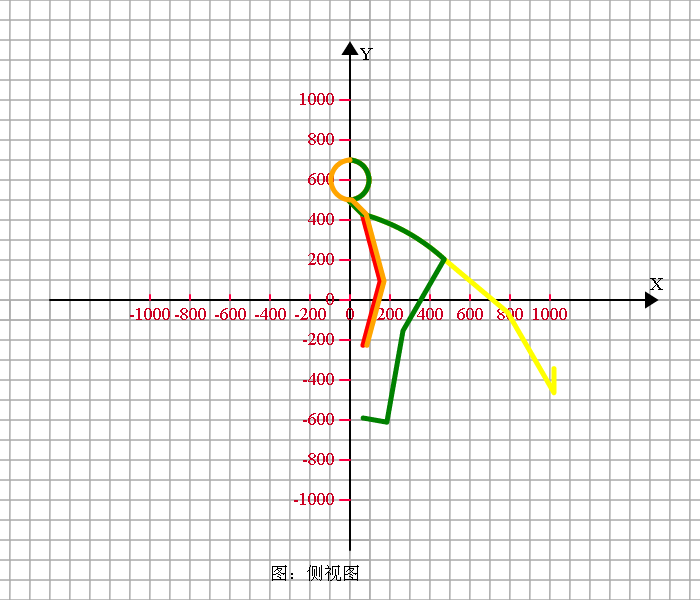
<span style="font-size:18px;">#
#立式<3>
$curvePath_165 = [[[0, 0], [2.0, -0.04], [11.93, -1.24], [21.69, -3.42], [31.18, -6.57], [40.31, -10.65], [48.99, -15.62], [57.13, -21.43], [64.65, -28.02], [71.47, -35.33], [77.53, -43.29], [82.76, -51.81], [87.12, -60.81], [90.56, -70.2], [93.04, -79.89], [94.54, -89.78], [95.05, -99.77], [94.56, -109.76], [93.07, -119.65], [90.6, -129.34], [87.18, -138.74], [82.84, -147.75], [77.62, -156.28], [71.57, -164.25], [64.76, -171.57], [57.25, -178.18], [49.12, -184.0], [40.45, -188.98], [31.33, -193.07], [21.84, -196.23], [12.08, -198.43], [2.15, -199.64], [-9.85, -199.66], [-9.85, -199.66], [60.97, -270.26], [60.97, -270.26], [150.78, -605.44], [150.78, -605.44], [90.73, -829.53], [90.73, -829.53], [64.85, -926.12]], [[0, 0], [-2.0, -0.04], [-11.93, -1.24], [-21.69, -3.42], [-31.18, -6.57], [-40.31, -10.65], [-48.99, -15.62], [-57.13, -21.43], [-64.65, -28.02], [-71.47, -35.33], [-77.53, -43.29], [-82.76, -51.81], [-87.12, -60.81], [-90.56, -70.2], [-93.04, -79.89], [-94.54, -89.78], [-95.05, -99.77], [-94.56, -109.76], [-93.07, -119.65], [-90.6, -129.34], [-87.18, -138.74], [-82.84, -147.75], [-77.62, -156.28], [-71.57, -164.25], [-64.76, -171.57], [-57.25, -178.18], [-49.12, -184.0], [-40.45, -188.98], [-31.33, -193.07], [-21.84, -196.23], [-12.08, -198.43], [-2.15, -199.64], [9.85, -199.66], [9.85, -199.66], [80.45, -270.48], [80.45, -270.48], [170.26, -605.66], [170.26, -605.66], [110.21, -829.75], [110.21, -829.75], [84.33, -926.34]], [[0, 0], [2.0, -0.04], [11.93, -1.24], [21.69, -3.42], [31.18, -6.57], [40.31, -10.65], [48.99, -15.62], [57.13, -21.43], [64.65, -28.02], [71.47, -35.33], [77.53, -43.29], [82.76, -51.81], [87.12, -60.81], [90.56, -70.2], [93.04, -79.89], [94.54, -89.78], [95.05, -99.77], [94.56, -109.76], [93.07, -119.65], [90.6, -129.34], [87.18, -138.74], [82.84, -147.75], [77.62, -156.28], [71.57, -164.25], [64.76, -171.57], [57.25, -178.18], [49.12, -184.0], [40.45, -188.98], [31.33, -193.07], [21.84, -196.23], [12.08, -198.43], [2.15, -199.64], [-9.85, -199.66], [-9.85, -199.66], [60.97, -270.26], [60.97, -270.26], [62.42, -270.65], [72.05, -273.35], [81.65, -276.15], [91.22, -279.04], [100.76, -282.03], [110.27, -285.11], [119.75, -288.29], [129.2, -291.56], [138.62, -294.93], [148.0, -298.39], [157.35, -301.94], [166.66, -305.59], [175.93, -309.33], [185.17, -313.16], [194.37, -317.08], [203.53, -321.1], [212.65, -325.21], [221.73, -329.41], [230.76, -333.7], [239.75, -338.08], [248.7, -342.55], [257.6, -347.11], [266.45, -351.76], [275.26, -356.5], [284.02, -361.32], [292.73, -366.23], [301.39, -371.23], [310.0, -376.31], [318.56, -381.48], [327.07, -386.73], [335.52, -392.07], [343.92, -397.49], [352.27, -403.0], [360.56, -408.59], [368.79, -414.26], [376.97, -420.02], [385.09, -425.86], [393.15, -431.78], [401.15, -437.78], [409.09, -443.86], [416.97, -450.02], [424.79, -456.26], [432.54, -462.57], [440.23, -468.96], [447.86, -475.43], [455.42, -481.97], [462.92, -488.59], [471.45, -496.3], [471.45, -496.3], [787.83, -761.77], [787.83, -761.77], [1019.83, -1163.61], [1019.83, -1163.61], [1019.83, -1043.61]], [[0, 0], [2.0, -0.04], [11.93, -1.24], [21.69, -3.42], [31.18, -6.57], [40.31, -10.65], [48.99, -15.62], [57.13, -21.43], [64.65, -28.02], [71.47, -35.33], [77.53, -43.29], [82.76, -51.81], [87.12, -60.81], [90.56, -70.2], [93.04, -79.89], [94.54, -89.78], [95.05, -99.77], [94.56, -109.76], [93.07, -119.65], [90.6, -129.34], [87.18, -138.74], [82.84, -147.75], [77.62, -156.28], [71.57, -164.25], [64.76, -171.57], [57.25, -178.18], [49.12, -184.0], [40.45, -188.98], [31.33, -193.07], [21.84, -196.23], [12.08, -198.43], [2.15, -199.64], [-9.85, -199.66], [-9.85, -199.66], [60.97, -270.26], [60.97, -270.26], [62.42, -270.65], [72.05, -273.35], [81.65, -276.15], [91.22, -279.04], [100.76, -282.03], [110.27, -285.11], [119.75, -288.29], [129.2, -291.56], [138.62, -294.93], [148.0, -298.39], [157.35, -301.94], [166.66, -305.59], [175.93, -309.33], [185.17, -313.16], [194.37, -317.08], [203.53, -321.1], [212.65, -325.21], [221.73, -329.41], [230.76, -333.7], [239.75, -338.08], [248.7, -342.55], [257.6, -347.11], [266.45, -351.76], [275.26, -356.5], [284.02, -361.32], [292.73, -366.23], [301.39, -371.23], [310.0, -376.31], [318.56, -381.48], [327.07, -386.73], [335.52, -392.07], [343.92, -397.49], [352.27, -403.0], [360.56, -408.59], [368.79, -414.26], [376.97, -420.02], [385.09, -425.86], [393.15, -431.78], [401.15, -437.78], [409.09, -443.86], [416.97, -450.02], [424.79, -456.26], [432.54, -462.57], [440.23, -468.96], [447.86, -475.43], [455.42, -481.97], [462.92, -488.59], [471.45, -496.3], [471.45, -496.3], [264.95, -853.97], [264.95, -853.97], [184.38, -1310.92], [184.38, -1310.92], [66.2, -1290.08]]]
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 135; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = -1/1000;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -15 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [-60, -30, 0];
RA = [-60, -30, 0];
LL = [-30, 20, -90];
RL = [50, -20, 150];
lBigArm = LA[0]; #取值范围 20 -> 160
lSmallArm = LA[1];
lHalm = LA[2];
rBigArm = RA[0]; #取值范围 -20 -> -160
rSmallArm = RA[1];
rHalm = RA[2];
lBigLeg = LL[0]; #取值范围 -10 -> -120
lSmallLeg = LL[1];
lFoot = LL[2];
rBigLeg = RL[0]; #取值范围 10 -> 120
rSmallLeg = RL[1];
rFoot = RL[2];
#长度投影系数
proj_lBigArm = 1 * cos_(0);
proj_lSmallArm = 1 * cos_(0);
proj_lHalm = 1;
proj_rBigArm = 1 * cos_(0);
proj_rSmallArm = 1 * cos_(0);
proj_rHalm = 1;
proj_lBigLeg = 1 * cos_(0);
proj_lSmallLeg = 1 * cos_(0);
proj_lFoot = 1 * cos_(0);
proj_rBigLeg = 1 * cos_(0);
proj_rSmallLeg = 1 * cos_(0);
proj_rFoot = 1 * cos_(0);
#</span>
<span style="font-size:18px;">#
#立式<4>
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 135; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = -1/1000;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -15 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [-60, -30, 0];
RA = [-60, -30, 0];
LL = [-10, 20, -90];
RL = [180, 10, -30];
lBigArm = LA[0]; #取值范围 20 -> 160
lSmallArm = LA[1];
lHalm = LA[2];
rBigArm = RA[0]; #取值范围 -20 -> -160
rSmallArm = RA[1];
rHalm = RA[2];
lBigLeg = LL[0]; #取值范围 -10 -> -120
lSmallLeg = LL[1];
lFoot = LL[2];
rBigLeg = RL[0]; #取值范围 10 -> 120
rSmallLeg = RL[1];
rFoot = RL[2];
#长度投影系数
proj_lBigArm = 1 * cos_(0);
proj_lSmallArm = 1 * cos_(0);
proj_lHalm = 1;
proj_rBigArm = 1 * cos_(0);
proj_rSmallArm = 1 * cos_(0);
proj_rHalm = 1;
proj_lBigLeg = 1 * cos_(0);
proj_lSmallLeg = 1 * cos_(0);
proj_lFoot = 1 * cos_(0);
proj_rBigLeg = 1 * cos_(0);
proj_rSmallLeg = 1 * cos_(0);
proj_rFoot = 1 * cos_(0);
#</span>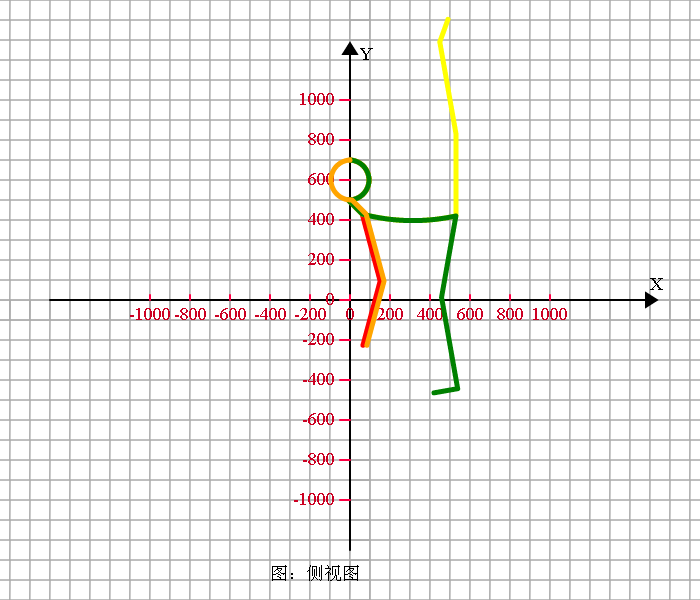
<span style="font-size:18px;">#
#立式<5>
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 135; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = 1/1000;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -45 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [-60, -30, 0];
RA = [-60, -30, 0];
LL = [-10, 20, -90];
RL = [180, 10, -30];
lBigArm = LA[0]; #取值范围 20 -> 160
lSmallArm = LA[1];
lHalm = LA[2];
rBigArm = RA[0]; #取值范围 -20 -> -160
rSmallArm = RA[1];
rHalm = RA[2];
lBigLeg = LL[0]; #取值范围 -10 -> -120
lSmallLeg = LL[1];
lFoot = LL[2];
rBigLeg = RL[0]; #取值范围 10 -> 120
rSmallLeg = RL[1];
rFoot = RL[2];
#长度投影系数
proj_lBigArm = 1 * cos_(0);
proj_lSmallArm = 1 * cos_(0);
proj_lHalm = 1;
proj_rBigArm = 1 * cos_(0);
proj_rSmallArm = 1 * cos_(0);
proj_rHalm = 1;
proj_lBigLeg = 1 * cos_(0);
proj_lSmallLeg = 1 * cos_(0);
proj_lFoot = 1 * cos_(0);
proj_rBigLeg = 1 * cos_(0);
proj_rSmallLeg = 1 * cos_(0);
proj_rFoot = 1 * cos_(0);
#</span>
<span style="font-size:18px;">#
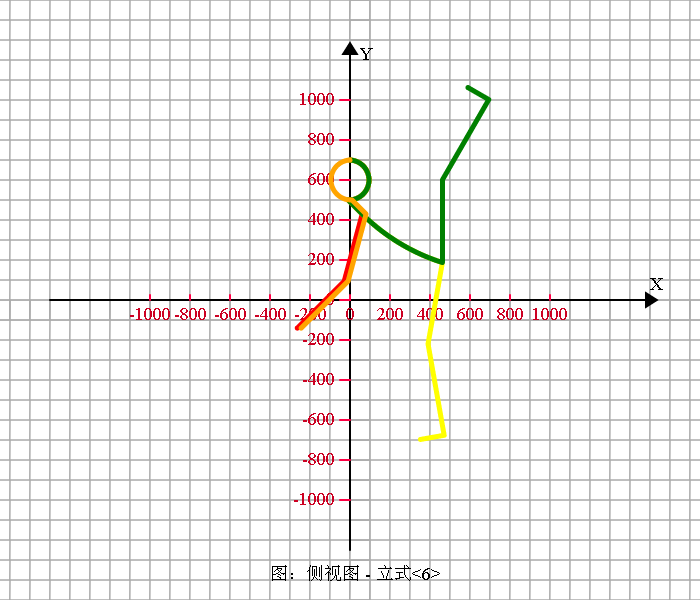
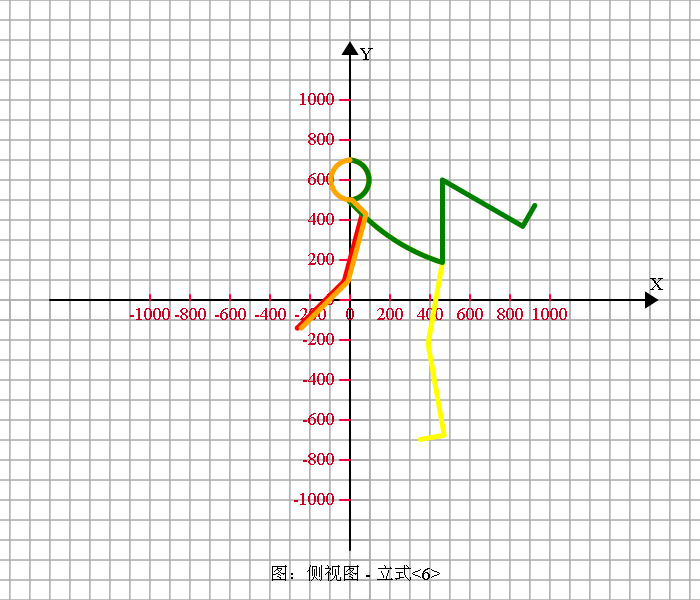
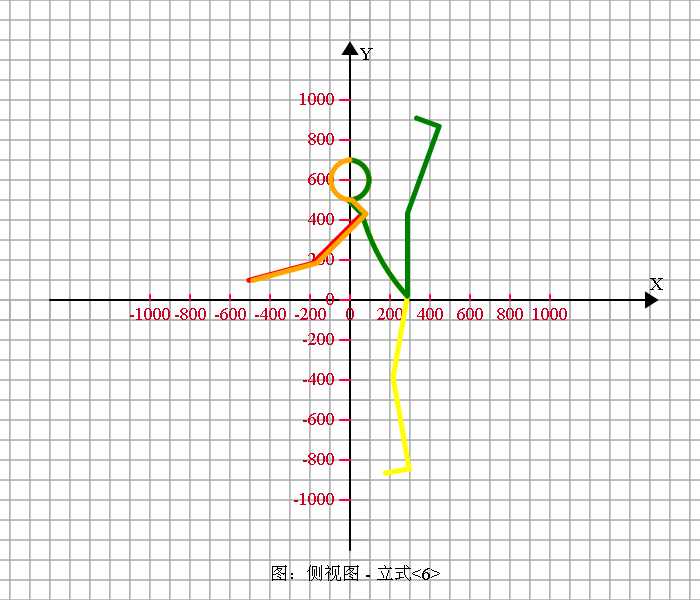
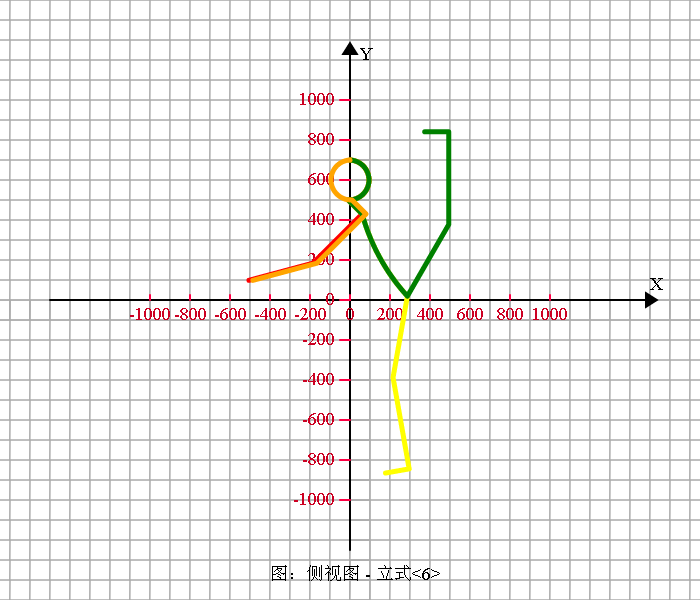
#立式<6>
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 135; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = 1/1000;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -45 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [-60, -30, 0];
RA = [-60, -30, 0];
LL = [-180, -30, 90];
RL = [10, 20, -90];
lBigArm = LA[0]; #取值范围 20 -> 160
lSmallArm = LA[1];
lHalm = LA[2];
rBigArm = RA[0]; #取值范围 -20 -> -160
rSmallArm = RA[1];
rHalm = RA[2];
lBigLeg = LL[0]; #取值范围 -10 -> -120
lSmallLeg = LL[1];
lFoot = LL[2];
rBigLeg = RL[0]; #取值范围 10 -> 120
rSmallLeg = RL[1];
rFoot = RL[2];
#长度投影系数
proj_lBigArm = 1 * cos_(0);
proj_lSmallArm = 1 * cos_(0);
proj_lHalm = 1;
proj_rBigArm = 1 * cos_(0);
proj_rSmallArm = 1 * cos_(0);
proj_rHalm = 1;
proj_lBigLeg = 1 * cos_(0);
proj_lSmallLeg = 1 * cos_(0);
proj_lFoot = 1 * cos_(0);
proj_rBigLeg = 1 * cos_(0);
proj_rSmallLeg = 1 * cos_(0);
proj_rFoot = 1 * cos_(0);
#</span>
<span style="font-size:18px;">#
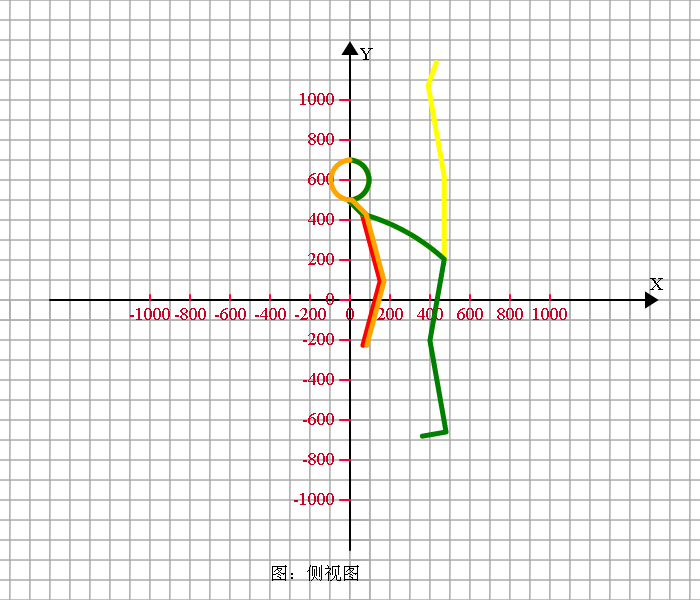
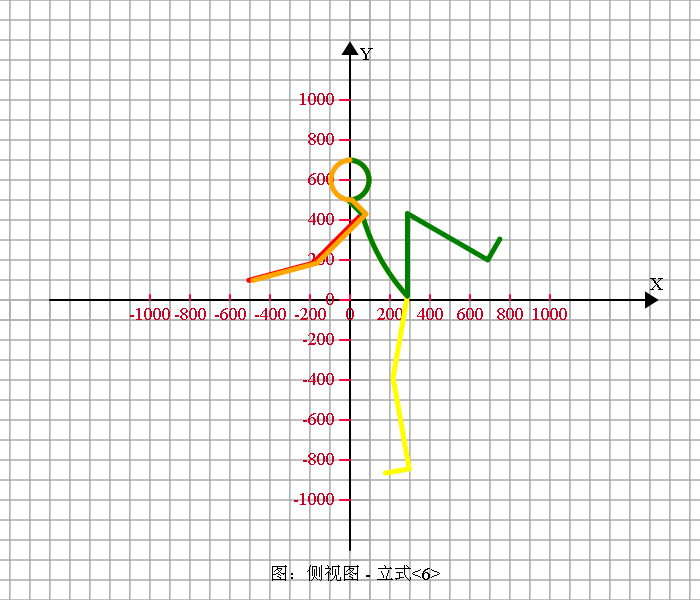
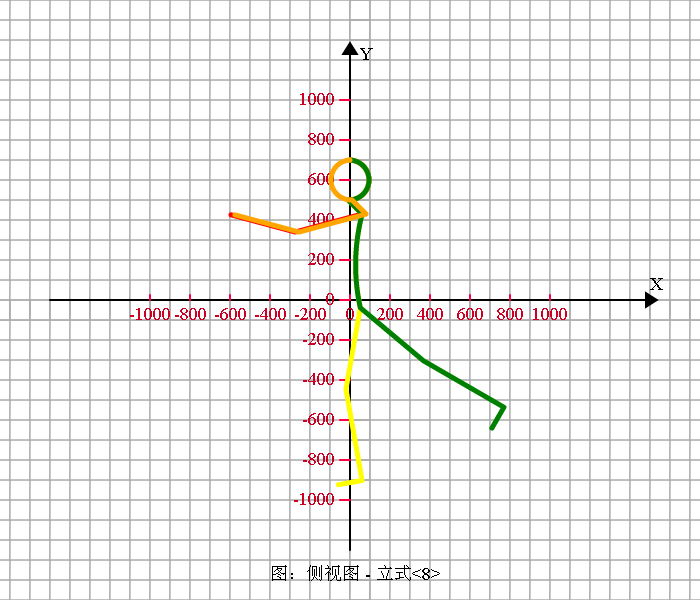
#立式<7>
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 135; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = 1/1000;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -75 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [-60, -30, 0];
RA = [-60, -30, 0];
LL = [130, 100, 10];
RL = [-10, 20, -90];
lBigArm = LA[0]; #取值范围 20 -> 160
lSmallArm = LA[1];
lHalm = LA[2];
rBigArm = RA[0]; #取值范围 -20 -> -160
rSmallArm = RA[1];
rHalm = RA[2];
lBigLeg = LL[0]; #取值范围 -10 -> -120
lSmallLeg = LL[1];
lFoot = LL[2];
rBigLeg = RL[0]; #取值范围 10 -> 120
rSmallLeg = RL[1];
rFoot = RL[2];
#长度投影系数
proj_lBigArm = 1 * cos_(0);
proj_lSmallArm = 1 * cos_(0);
proj_lHalm = 1;
proj_rBigArm = 1 * cos_(0);
proj_rSmallArm = 1 * cos_(0);
proj_rHalm = 1;
proj_lBigLeg = 1 * cos_(0);
proj_lSmallLeg = 1 * cos_(0);
proj_lFoot = 1 * cos_(0);
proj_rBigLeg = 1 * cos_(0);
proj_rSmallLeg = 1 * cos_(0);
proj_rFoot = 1 * cos_(0);
$curvePath_165 = [[[0, 0], [2.0, -0.04], [11.93, -1.24], [21.69, -3.42], [31.18, -6.57], [40.31, -10.65], [48.99, -15.62], [57.13, -21.43], [64.65, -28.02], [71.47, -35.33], [77.53, -43.29], [82.76, -51.81], [87.12, -60.81], [90.56, -70.2], [93.04, -79.89], [94.54, -89.78], [95.05, -99.77], [94.56, -109.76], [93.07, -119.65], [90.6, -129.34], [87.18, -138.74], [82.84, -147.75], [77.62, -156.28], [71.57, -164.25], [64.76, -171.57], [57.25, -178.18], [49.12, -184.0], [40.45, -188.98], [31.33, -193.07], [21.84, -196.23], [12.08, -198.43], [2.15, -199.64], [-9.85, -199.66], [-9.85, -199.66], [60.97, -270.26], [60.97, -270.26], [-184.4, -515.63], [-184.4, -515.63], [-408.49, -575.68], [-408.49, -575.68], [-505.08, -601.56]], [[0, 0], [-2.0, -0.04], [-11.93, -1.24], [-21.69, -3.42], [-31.18, -6.57], [-40.31, -10.65], [-48.99, -15.62], [-57.13, -21.43], [-64.65, -28.02], [-71.47, -35.33], [-77.53, -43.29], [-82.76, -51.81], [-87.12, -60.81], [-90.56, -70.2], [-93.04, -79.89], [-94.54, -89.78], [-95.05, -99.77], [-94.56, -109.76], [-93.07, -119.65], [-90.6, -129.34], [-87.18, -138.74], [-82.84, -147.75], [-77.62, -156.28], [-71.57, -164.25], [-64.76, -171.57], [-57.25, -178.18], [-49.12, -184.0], [-40.45, -188.98], [-31.33, -193.07], [-21.84, -196.23], [-12.08, -198.43], [-2.15, -199.64], [9.85, -199.66], [9.85, -199.66], [80.45, -270.48], [80.45, -270.48], [-164.92, -515.85], [-164.92, -515.85], [-389.01, -575.9], [-389.01, -575.9], [-485.6, -601.78]], [[0, 0], [2.0, -0.04], [11.93, -1.24], [21.69, -3.42], [31.18, -6.57], [40.31, -10.65], [48.99, -15.62], [57.13, -21.43], [64.65, -28.02], [71.47, -35.33], [77.53, -43.29], [82.76, -51.81], [87.12, -60.81], [90.56, -70.2], [93.04, -79.89], [94.54, -89.78], [95.05, -99.77], [94.56, -109.76], [93.07, -119.65], [90.6, -129.34], [87.18, -138.74], [82.84, -147.75], [77.62, -156.28], [71.57, -164.25], [64.76, -171.57], [57.25, -178.18], [49.12, -184.0], [40.45, -188.98], [31.33, -193.07], [21.84, -196.23], [12.08, -198.43], [2.15, -199.64], [-9.85, -199.66], [-9.85, -199.66], [60.97, -270.26], [60.97, -270.26], [61.36, -271.71], [64.06, -281.34], [66.86, -290.94], [69.75, -300.51], [72.74, -310.05], [75.82, -319.56], [79.0, -329.04], [82.27, -338.49], [85.64, -347.91], [89.1, -357.29], [92.65, -366.64], [96.3, -375.95], [100.04, -385.22], [103.87, -394.46], [107.79, -403.66], [111.81, -412.82], [115.92, -421.94], [120.12, -431.02], [124.41, -440.05], [128.79, -449.04], [133.26, -457.99], [137.82, -466.89], [142.47, -475.74], [147.21, -484.55], [152.03, -493.31], [156.94, -502.02], [161.94, -510.68], [167.02, -519.29], [172.19, -527.85], [177.44, -536.36], [182.78, -544.81], [188.2, -553.21], [193.71, -561.56], [199.3, -569.85], [204.97, -578.08], [210.73, -586.26], [216.57, -594.38], [222.49, -602.44], [228.49, -610.44], [234.57, -618.38], [240.73, -626.26], [246.97, -634.08], [253.28, -641.83], [259.67, -649.52], [266.14, -657.15], [272.68, -664.71], [279.3, -672.21], [287.01, -680.74], [287.01, -680.74], [215.29, -1087.47], [215.29, -1087.47], [295.86, -1544.42], [295.86, -1544.42], [177.68, -1565.26]], [[0, 0], [2.0, -0.04], [11.93, -1.24], [21.69, -3.42], [31.18, -6.57], [40.31, -10.65], [48.99, -15.62], [57.13, -21.43], [64.65, -28.02], [71.47, -35.33], [77.53, -43.29], [82.76, -51.81], [87.12, -60.81], [90.56, -70.2], [93.04, -79.89], [94.54, -89.78], [95.05, -99.77], [94.56, -109.76], [93.07, -119.65], [90.6, -129.34], [87.18, -138.74], [82.84, -147.75], [77.62, -156.28], [71.57, -164.25], [64.76, -171.57], [57.25, -178.18], [49.12, -184.0], [40.45, -188.98], [31.33, -193.07], [21.84, -196.23], [12.08, -198.43], [2.15, -199.64], [-9.85, -199.66], [-9.85, -199.66], [60.97, -270.26], [60.97, -270.26], [61.36, -271.71], [64.06, -281.34], [66.86, -290.94], [69.75, -300.51], [72.74, -310.05], [75.82, -319.56], [79.0, -329.04], [82.27, -338.49], [85.64, -347.91], [89.1, -357.29], [92.65, -366.64], [96.3, -375.95], [100.04, -385.22], [103.87, -394.46], [107.79, -403.66], [111.81, -412.82], [115.92, -421.94], [120.12, -431.02], [124.41, -440.05], [128.79, -449.04], [133.26, -457.99], [137.82, -466.89], [142.47, -475.74], [147.21, -484.55], [152.03, -493.31], [156.94, -502.02], [161.94, -510.68], [167.02, -519.29], [172.19, -527.85], [177.44, -536.36], [182.78, -544.81], [188.2, -553.21], [193.71, -561.56], [199.3, -569.85], [204.97, -578.08], [210.73, -586.26], [216.57, -594.38], [222.49, -602.44], [228.49, -610.44], [234.57, -618.38], [240.73, -626.26], [246.97, -634.08], [253.28, -641.83], [259.67, -649.52], [266.14, -657.15], [272.68, -664.71], [279.3, -672.21], [287.01, -680.74], [287.01, -680.74], [603.39, -415.27], [603.39, -415.27], [247.95, -117.02], [247.95, -117.02], [144.03, -57.02]]]
#</span><span style="font-size:18px;">#
#立式<8>
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 135; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = 1/1000;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -105 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [-60, -30, 0];
RA = [-60, -30, 0];
LL = [50, 10, -90];
RL = [-10, 20, -90];
lBigArm = LA[0]; #取值范围 20 -> 160
lSmallArm = LA[1];
lHalm = LA[2];
rBigArm = RA[0]; #取值范围 -20 -> -160
rSmallArm = RA[1];
rHalm = RA[2];
lBigLeg = LL[0]; #取值范围 -10 -> -120
lSmallLeg = LL[1];
lFoot = LL[2];
rBigLeg = RL[0]; #取值范围 10 -> 120
rSmallLeg = RL[1];
rFoot = RL[2];
#长度投影系数
proj_lBigArm = 1 * cos_(0);
proj_lSmallArm = 1 * cos_(0);
proj_lHalm = 1;
proj_rBigArm = 1 * cos_(0);
proj_rSmallArm = 1 * cos_(0);
proj_rHalm = 1;
proj_lBigLeg = 1 * cos_(0);
proj_lSmallLeg = 1 * cos_(0);
proj_lFoot = 1 * cos_(0);
proj_rBigLeg = 1 * cos_(0);
proj_rSmallLeg = 1 * cos_(0);
proj_rFoot = 1 * cos_(0);
#</span>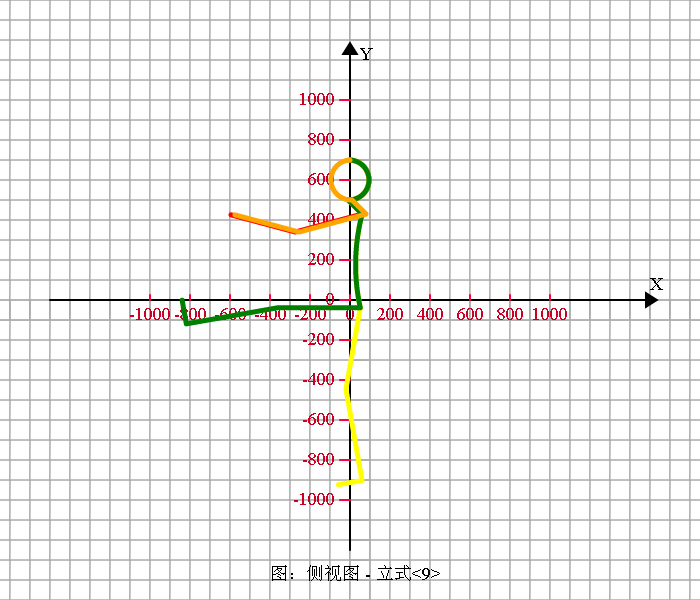
<span style="font-size:18px;">#
#立式<9>
#旋转, 左肢角度取正值,右肢脚度取负值
neckRot = 135; #往左斜从90度减角,往右加角
#左侧取正值,右侧取负值
upBodyCurveRate = 1/1000;
#负y轴为-90, 第四象限为0->-90,其余类推
neckEndAngle = -105 / 180 * math.pi;
midBodyAngle = -90 / 180 * math.pi;
LA = [-60, -30, 0];
RA = [-60, -30, 0];
LL = [-90, 10, -90];
RL = [-10, 20, -90];
lBigArm = LA[0]; #取值范围 20 -> 160
lSmallArm = LA[1];
lHalm = LA[2];
rBigArm = RA[0]; #取值范围 -20 -> -160
rSmallArm = RA[1];
rHalm = RA[2];
lBigLeg = LL[0]; #取值范围 -10 -> -120
lSmallLeg = LL[1];
lFoot = LL[2];
rBigLeg = RL[0]; #取值范围 10 -> 120
rSmallLeg = RL[1];
rFoot = RL[2];
#长度投影系数
proj_lBigArm = 1 * cos_(0);
proj_lSmallArm = 1 * cos_(0);
proj_lHalm = 1;
proj_rBigArm = 1 * cos_(0);
proj_rSmallArm = 1 * cos_(0);
proj_rHalm = 1;
proj_lBigLeg = 1 * cos_(0);
proj_lSmallLeg = 1 * cos_(0);
proj_lFoot = 1 * cos_(0);
proj_rBigLeg = 1 * cos_(0);
proj_rSmallLeg = 1 * cos_(0);
proj_rFoot = 1 * cos_(0);
#</span>本节到此结束,欲知后事如何,请看下回分解。















 481
481

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









