







项目整体框架:
监听线程×4:
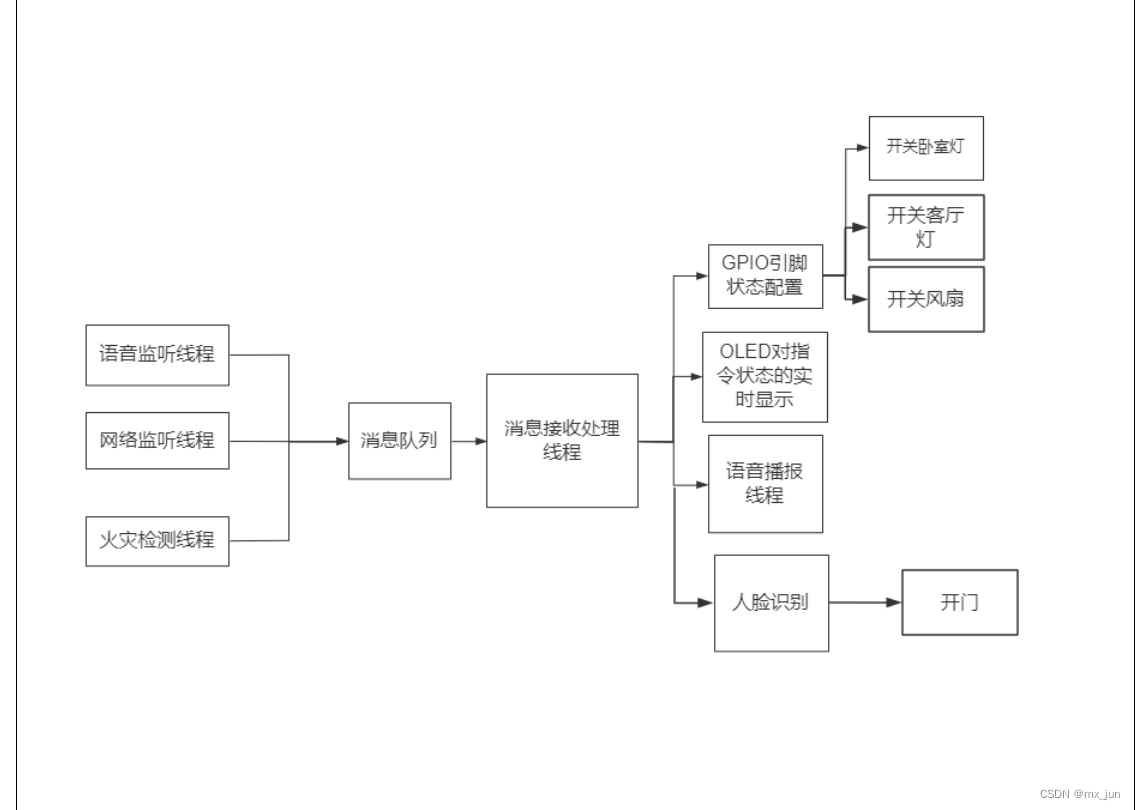
1. 语音监听线程:用于监听语音指令, 当有语音指令过来后, 通过消息队列的方式给消息处理线程发送指令
2. 网络监听线程:用于监听网络指令,当有网络指令过来后, 通过消息队列的方式给消息处理线程发送指令
3. 火灾检测线程:当存在煤气泄漏或者火灾闲情时, 发送警报指令给消息处理线程
4. 消息监听线程: 用于处理以上3个线程发过来的指令,并根据指令要求配置GPIO引脚状态,OLED屏显示、语音播报,还有人脸识别开门
统一的监听模块接口 -- control:
上述四个线程采用统一个对外接口接口,同时添加到监听链表中
统一的监听模块接口如下:
struct control
{
char control_name[128]; //监听模块名称
int (*init)(void); //初始化函数
void (*final)(void);//结束释放函数
void *(*get)(void *arg);//监听函数,如语音监听
void *(*set)(void *arg); //设置函数,如语音播报
struct control *next;
};//定义类似如下函数向这个统一的接口中添加
struct control *add_device_to_ctrl_list(struct control *phead, struct control *device);
统一的设备类接口
被控制的设备类也统一配置接口,同时添加到设备链表中。
统一的设备类接口如下:
struct gdevice
{
char dev_name[128]; //设备名称
int key; //key值,用于匹配控制指令的值
int gpio_pin; //控制的gpio引脚
int gpio_mode; //输入输出模式
int gpio_status; //高低电平状态
int check_face_status; //是否进行人脸检测状态
int voice_set_status; //是否语音语音播报
struct gdevice *next;
};主要代码:
-------------------------------------------
Makefile
CC := aarch64-linux-gnu-gcc
# SRC -- 存放所有的 .c 文件
SRC := $(shell find src -name "*.c")
# INC -- 存放所有的 头文件 (包括自己写的 和 第三方)
INC := ./inc \
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1286
1286

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









