






多智能体,神经网络,自适应动态滑模,有文献可以参考。
符合要求请放心联系,simulink,复现,保证能够运行。
ID:39100675884553656
竹林清风w
多智能体协同控制是一种在复杂系统中协同多个智能体实现统一目标的控制策略。随着神经网络技术的快速发展,人们开始利用神经网络来实现多智能体协同控制。本文将结合神经网络和自适应动态滑模控制技术,提出一种基于自适应动态滑模的神经网络多智能体协同控制方法,以解决在复杂系统中多智能体之间的协同问题。
首先,本文介绍了多智能体协同控制的背景和意义。复杂系统中存在着大量的智能体,它们之间的相互作用和协调对于整个系统的运行和效果起着至关重要的作用。传统的控制方法往往难以应对复杂系统中多智能体之间的协同问题,因此,引入神经网络技术具有重要的意义。神经网络具有自适应性和非线性映射的能力,可以很好地应对复杂系统中的多智能体协同控制问题。
其次,本文详细介绍了自适应动态滑模控制技术。自适应动态滑模控制是一种基于滑模控制的自适应控制方法,通过引入自适应机制来实现对系统动态特性的调节和改善。这种控制方法具有较好的鲁棒性和适应性,可以应对复杂系统中的不确定性和变化。
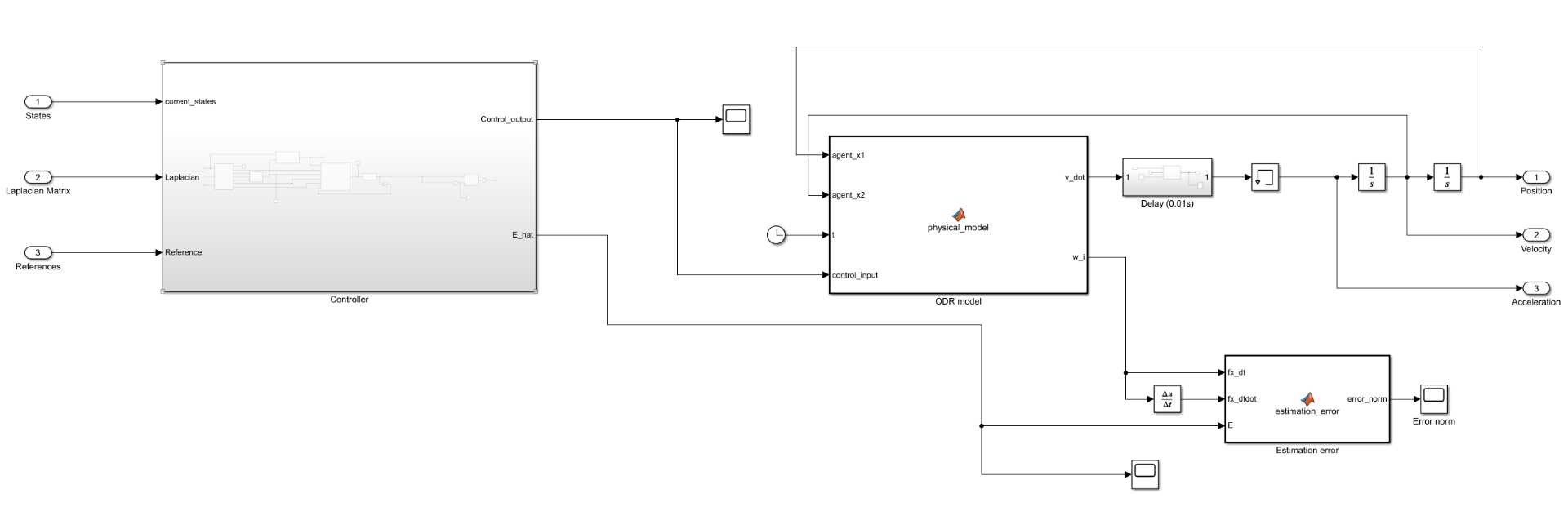
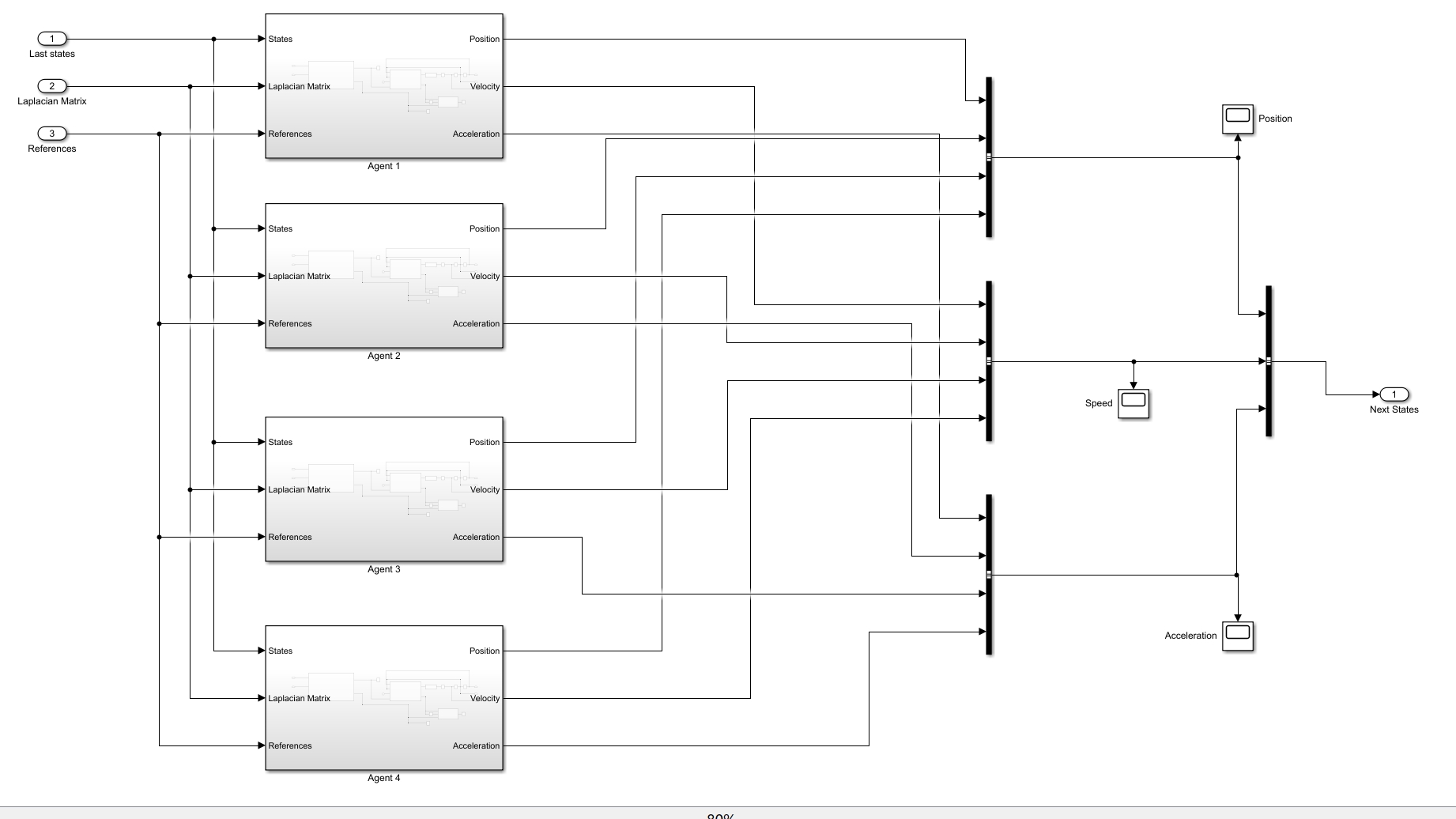
然后,本文提出了基于自适应动态滑模的神经网络多智能体协同控制方法。该方法将神经网络和自适应动态滑模相结合,通过神经网络构建多智能体之间的通信和协调机制,同时利用自适应动态滑模控制方法实现对系统动态特性的调节和改善。具体而言,利用神经网络对多智能体之间的通信和协调进行建模和学习,然后结合自适应动态滑模控制方法对系统动态进行调节和优化。实验结果表明,该方法在复杂系统中能够实现多智能体之间的协同控制,并且具有较好的性能和鲁棒性。
最后,本文对所提出的方法进行了实验验证。通过利用Simulink软件进行仿真实验,复现了所提出的基于自适应动态滑模的神经网络多智能体协同控制方法,并验证了其在复杂系统中的有效性和性能。实验结果表明,所提出的方法能够实现多智能体之间的协同控制,并且具有较好的性能和鲁棒性。为了保证读者能够复现实验结果,我们提供了详细的实验流程和参数设置。
综上所述,本文提出了一种基于自适应动态滑模的神经网络多智能体协同控制方法,并通过Simulink软件进行了实验验证。实验结果表明,所提出的方法能够有效解决复杂系统中多智能体之间的协同问题,并具有较好的性能和鲁棒性。这种方法在实际应用中具有广泛的应用前景和研究价值。
相关的代码,程序地址如下:http://matup.cn/675884553656.html
















 386
386











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









