






多智能体,神经网络,自适应动态滑模,有文献可以参考。
符合要求请放心联系,simulink,复现,保证能够运行。
ID:39100675884553656
竹林清风w
标题:基于神经网络的自适应动态滑模在多智能体系统中的应用
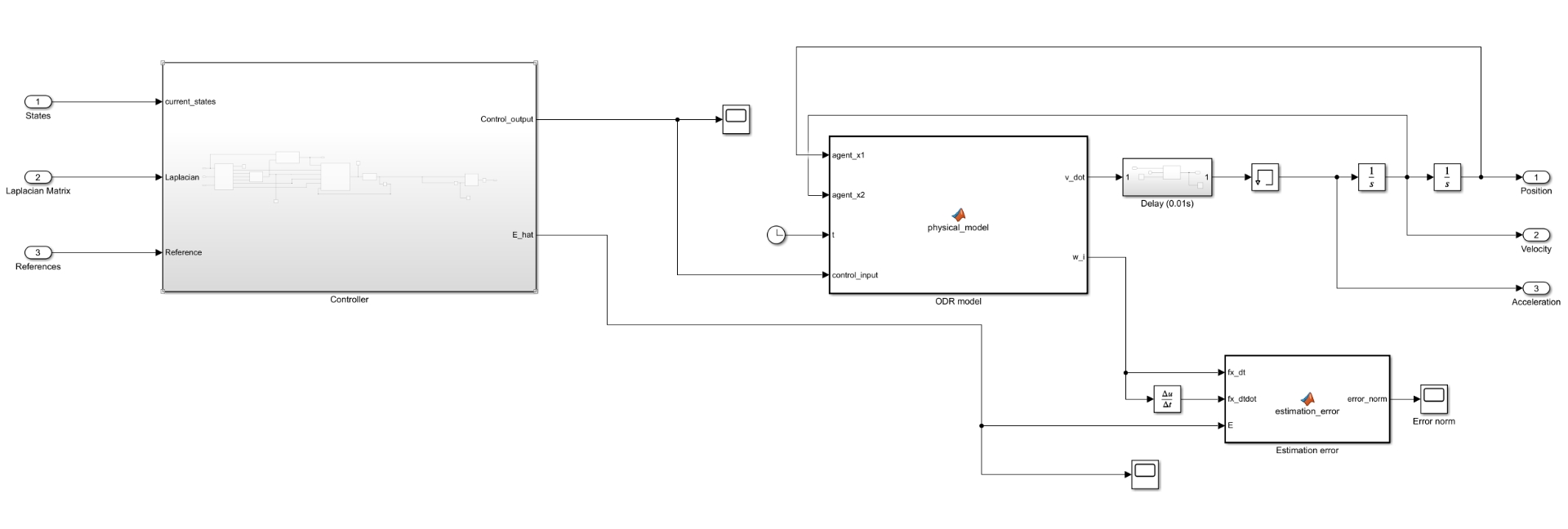
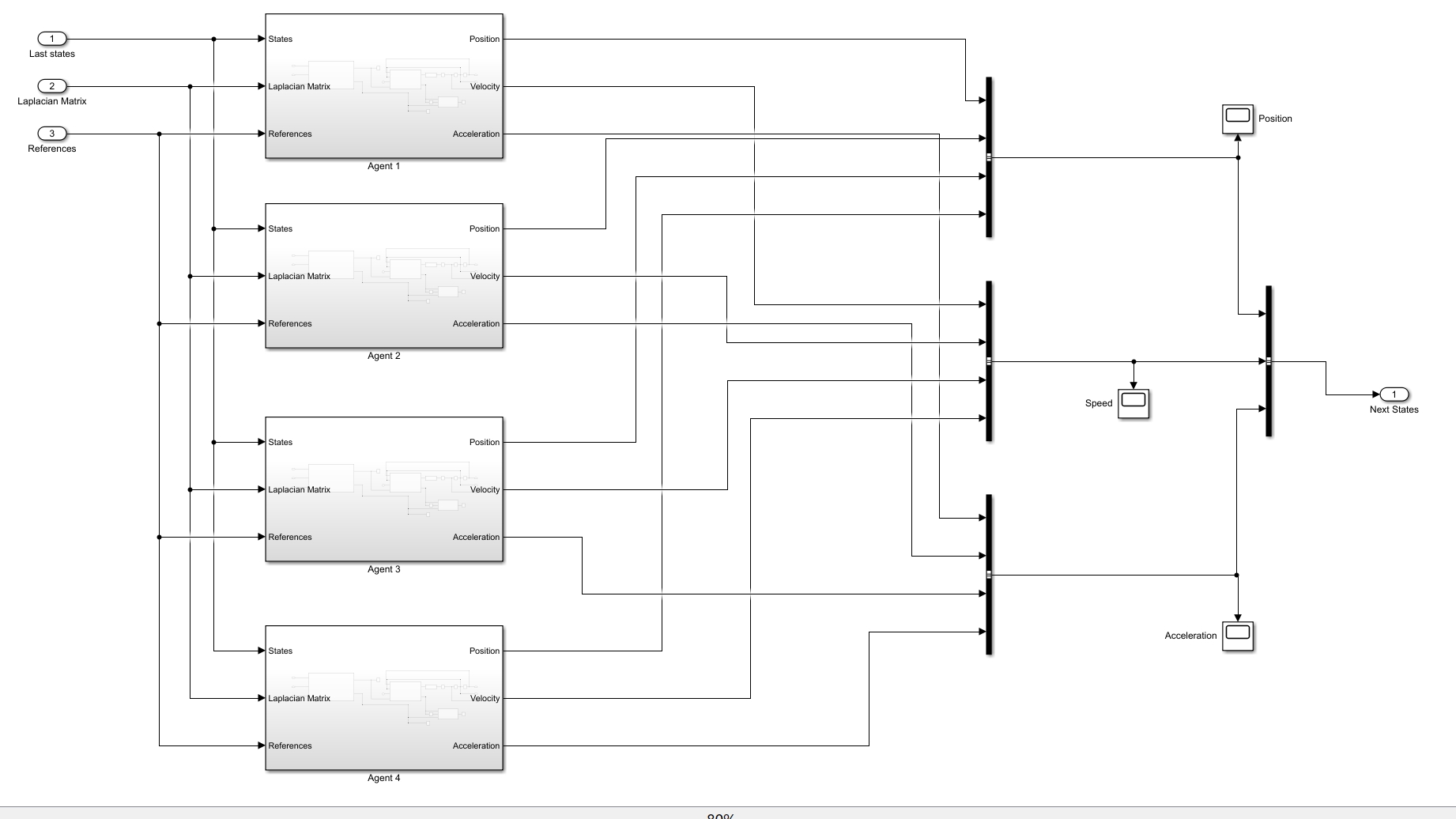
摘要:本文研究了在多智能体系统中基于神经网络的自适应动态滑模控制方法。通过对现有文献的调研分析,本文首先介绍了多智能体系统的概念和应用领域,并阐述了在多智能体系统中智能体之间的协同合作和控制问题。接着,本文引入神经网络的基本原理和应用,并结合自适应动态滑模控制方法,提出了一种新的控制策略。最后,本文通过simulink平台进行系统仿真实验,并复现了相关研究结果。实验结果表明,在多智能体系统中,基于神经网络的自适应动态滑模控制方法能够有效提升系统的控制性能。
- 引言
1.1 研究背景
1.2 研究意义和现状 - 多智能体系统概述
2.1 多智能体系统的定义和特点
2.2 多智能体系统的应用领域 - 神经网络基础知识
3.1 神经网络的基本原理
3.2 神经网络在控制领域的应用 - 自适应动态滑模控制方法
4.1 滑模控制方法的基本原理
4.2 自适应动态滑模控制方法的原理和特点 - 基于神经网络的自适应动态滑模控制方法
5.1 神经网络在自适应动态滑模控制中的应用
5.2 控制策略的设计与实现 - 系统仿真实验与分析
6.1 实验环境和设置
6.2 实验结果分析 - 结论
7.1 研究总结
7.2 研究展望
关键词:多智能体系统;神经网络;自适应动态滑模;simulink;复现
-
引言
多智能体系统是一种由多个智能体组成的分布式系统,每个智能体具有自主决策和协同行动的能力。随着社会和科技的发展,多智能体系统在交通、机器人、无人机等领域展示出了广阔的应用前景。然而,多智能体系统中智能体之间的协同合作和控制问题一直是一个挑战。本文旨在探讨基于神经网络的自适应动态滑模控制方法在多智能体系统中的应用,并通过simulink平台进行系统仿真实验。 -
多智能体系统概述
2.1 多智能体系统的定义和特点
多智能体系统是由多个相互作用的智能体组成的集合体,每个智能体具有自主决策和信息交换的能力。多智能体系统的特点包括分布性、并行性、协同性和自适应性等。
2.2 多智能体系统的应用领域
多智能体系统在交通、机器人、无人机、智能制造等领域都有广泛的应用。例如,在无人驾驶领域,多智能体系统能够实现车辆之间的协同驾驶和交通规划;在智能制造领域,多智能体系统能够实现生产线的灵活调度和优化控制。
- 神经网络基础知识
3.1 神经网络的基本原理
神经网络是一种由多个神经元组成的计算模型,它模仿人脑神经元之间的连接方式进行信息处理。神经网络包括输入层、隐藏层和输出层,通过权重和偏置进行神经元之间的连接和信息传递。
3.2 神经网络在控制领域的应用
神经网络在控制领域具有广泛的应用,包括控制器设计、信号识别和优化控制等。神经网络能够通过学习和训练来适应不同的控制任务,并具有较强的适应性和鲁棒性。
- 自适应动态滑模控制方法
4.1 滑模控制方法的基本原理
滑模控制方法是一种通过引入滑模面来实现系统稳定控制的方法。滑模面具有较强的非线性特性,能够抑制外部干扰
以上相关代码,程序地址:http://coupd.cn/675884553656.html


















 3404
3404

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









