







 本文详细介绍了QMI8658A66轴EVB评估板的硬件连接、I2C和USART接口配置,以及如何使用Keil5进行程序编译和传感器校准。着重于STM32F103的配合与传感器初始化过程。
本文详细介绍了QMI8658A66轴EVB评估板的硬件连接、I2C和USART接口配置,以及如何使用Keil5进行程序编译和传感器校准。着重于STM32F103的配合与传感器初始化过程。
QMI8658A6<6轴>-EVB 评估板-使用说明书
0.前言
【相关博文】
【QMI8658 - 姿态传感器学习笔记 - Ⅰ】
【QMI8658 - 姿态传感器学习笔记 - Ⅱ】
【QMI8658 - 姿态传感器学习笔记 - Ⅲ】
【QMI8658A Datasheet Rev A-勘误表】
【Keil5软件使用-基础使用篇 】
【Keil5软件使用-进阶工程配置篇】
【Keil5软件使用-进阶调试篇】
1.硬件准备
【MCU开发板】——在开始所有的实验之前,你需要一块完整的STM32F103单片机开发板。(如果你是自己移植程序任何MCU都可以)
【QMI8658A(6轴)EVB 评估板】——可以通过淘宝购买QMI8658A(6轴)-EVB板。
QMI8658A(6轴)-EVB板和MCU开发板开发板通过I2C接口连接。

1.1 I2C 接口
//使用STM32F103的I2C1:
PB6 ------> CLK1
PB7 ------> SDA1
1.2 USART 接口
//使用STM32F103的USART2
PA2 ------> USART2_TX
PA3 ------> USART2_RX
串口配置:
1.speed 115200 bauds
2.Data bits 8
3.Stop bits 1
4.Parity None
5.Flow control None
6.enter style \r\n
Tips1: 在综合实例15.QMI8658_Example-visualizer中,所使用的波特率是921600。而上位机example-algo-visualizer.exe的默认波特率也是921600。需要注意的是,其他参考实例的波特率均为115200。
1.3 引脚序号功能定义
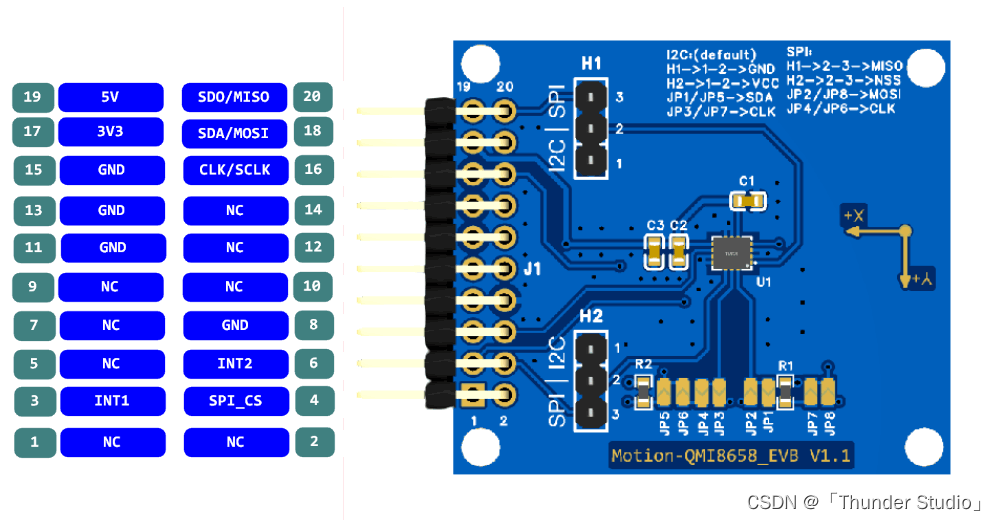
Tips2: 特别注意,EVB评估板的引脚号排列应当仔细观看。根据给出的信息,EVB评估板的PIN16和PIN18被指定为I2C接口,而PIN4、PIN16、PIN18和PIN20则被指定为SPI接口。
2.程序运行
【下载程序】——请将位于资料文件夹路径下的"3B_QMI8658-EVB\04.IMU-for-QMI8658_I2C\Project"文件夹中的"IMU-QMI8658.uvprojx"工程文件打开,并进行编译和下载。对于初学者,可以参考Keil IDE使用教程。
【上电进行传感器校准】——在进行上电之前,应首先将EVB评估板Z轴向上水平放置在平台上,以确保实验环境的稳定性。随后,启动上电程序,系统将自动对QMI8658A加速度计和陀螺仪的常值零偏进行校准,以提高校准的准确性和可靠性。
【观测串口助手】—— 串口显示以m/s^2为单位的加速度计数据和以rad/s单位的陀螺仪数据



















 1628
1628

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











