







简单了解RS485与RS232(UART)
前言
当前智能汽车上一般配置有12路超声波雷达,这些专用超声波雷达内置了MCU,直接输出数字化的测距结果,一般硬件接口采用串口RS485,通信协议采用modbus。请思考:
1)RS485与RS232(UART)有什么不同?
2)Modbus协议是什么?
3)如果让你设计一款 12路车载超声波雷达,采用 stm32F103+HC-SR04超声波模块,对外提供RS485和Modbus协议,你的设计方案是什么?
一、UART和RS232、RS485的关系
1、UART
UART,是通用异步收发传输器(Universal Asynchronous Receiver/Transmitter),既然是“器”,显然,它就是个设备而已,要完成一个特定的功能的硬件,它本身并不是协议。那么它要完成什么功能呢?它的最基本功能,是串行数据和并行数据之间的转换。我们知道,计算机中的数据以Byte为基本单位,对一个Byte的存取是并行的,即,同时取得/写入8个bit。而串行通信,需要把这个Byte“打碎”,按照时间顺序来收发以实现串行。例如:
内存中的数据是: 1 1 1 0 0 1 0 1
串行发送的实际效果是(按时间排序【注1】):
1
0
1
0
0
1
1
1
接收则是上述过程的逆过程。
这就是UART做的最基本工作,进一步的,它还要控制“发车的班次”,比如确认一个Byte的这8个bit是什么时候开始的,又是什么时候结束的,两个班次之间至少要隔多长时间的缓冲,等等。这一部分,也具有协议的特征,但是相对于道路上的协议,更具有一般性,或曰,是与车在什么道路上开,相对独立的。
2、RS232/RS485
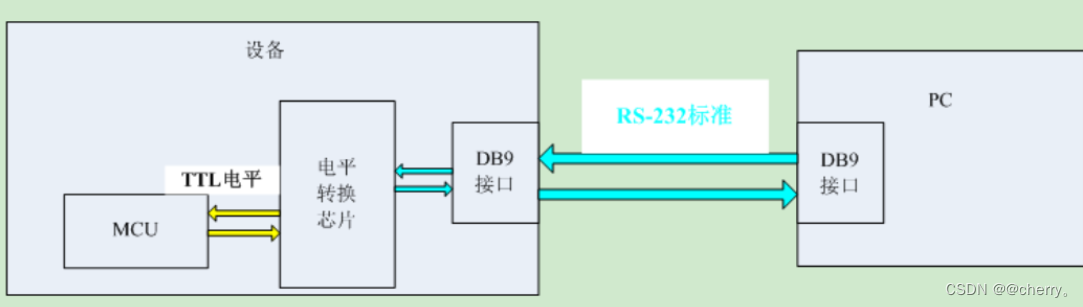
RS232,RS485是一种电平标准
数据在通信双方之间传输,本质是传输物理的电平 比方说传输5V的电压 -1V的电压信号,这些物理信号在传输过程中会受到很多干扰,比方说你传输一个5V的电压,到了接收端可能就变成了4.8V,并且通信的双方高低电平的参考电压可能不同。
那么这个时候就需要一个电平标准,来判断多少V的电压是高电平 1,多少V的电压是低电平 0 这就诞生了 RS-485 RS-232
RS232:是电子工业协会(Electronic Industries Association,EIA) 制定的异步传输标准接口,同时对应着电平标准和通信协议(时序),其电平标准:+3V~+15V对应0,-3V~-15V对应1。
全双工
逻辑1:-15V–5V
逻辑0:+3V–+15V
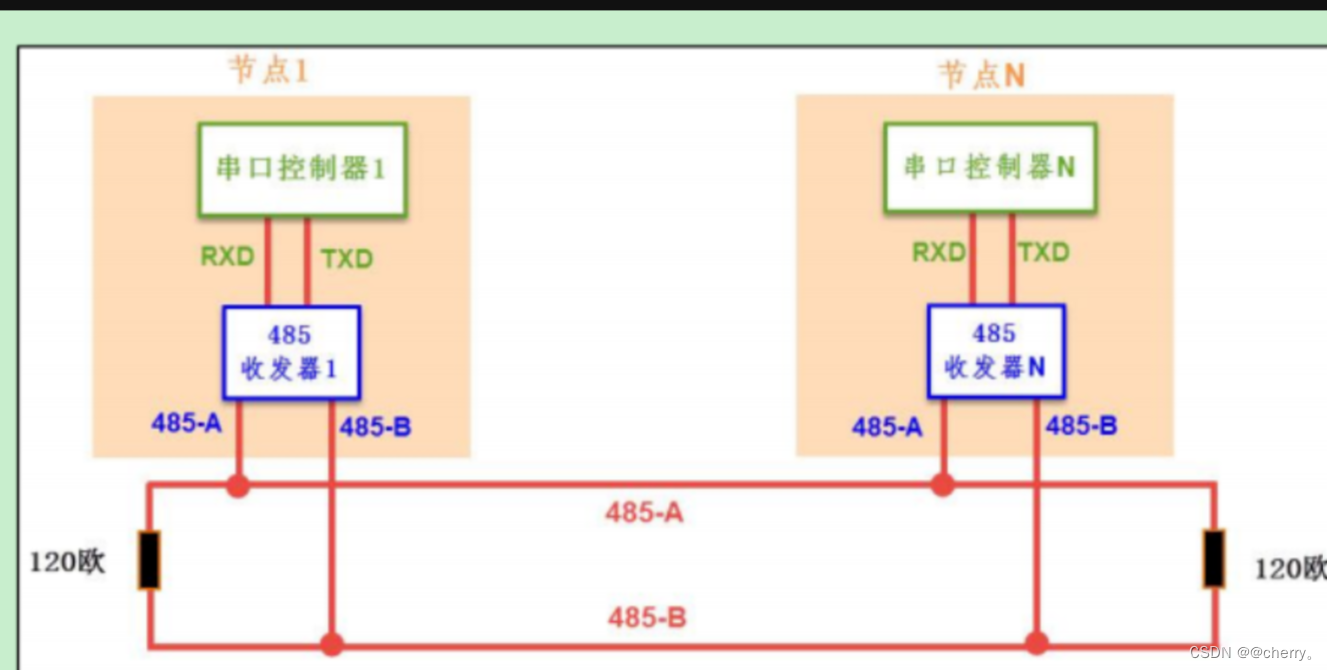
RS485:RS485是一种串口接口标准,为了长距离传输采用差分方式传输,传输的是差分信号,抗干扰能力比RS232强很多。两线压差为-2-6V表示0,两线压差为+2+6V表示1
半双工
逻辑1:+2V~+6V
逻辑0: -2V~ -6V
注意485的电平指的是485-A和485-B两根传输线,两线间的电压差。而不是传输线上的电压
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 910
910

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









