






利用matlab中的robotics toolbox工具,建立机械臂的frame
操作流程:
- 给出各个关节的旋转矩阵的初始角度,给出各个操作臂的长度,设置base的坐标。
- 给出所有旋转矩阵
- 给出在各自坐标系下的方向向量
- 将所有的方向向量向基坐标系下转换
- 将转换后的各个位置坐标存入数组内并绘制在基座标系下的图像
代码:
SL1=Link([0 0 0.180 -pi/2 0 ],'standard');
SL2=Link([0 0 0.600 0 0 ],'standard');
SL3=Link([0 0 0.130 -pi/2 0 ],'standard');
SL4=Link([0 0.630 0 pi/2 0 ],'standard');
SL5=Link([0 0 0 -pi/2 0 ],'standard');
SL6=Link([0 0.1075 0 0 0 ],'standard');
starobot=SerialLink([SL1 SL2 SL3 SL4 SL5 SL6],'name','Robot');
figure(1);
teach(starobot);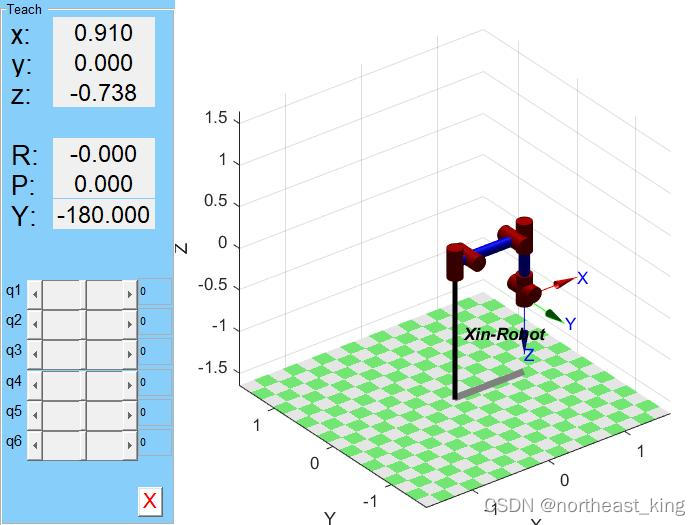
另一种较为简单:
clear
clc
R01=[ cos(a) -sin(a) 0; sin(a) cos(a) 0; 0 0 1];
R12=[ cos(b) 0 sin(b); 0 1 0;-sin(b) 0 cos(b)];
R23=[ cos(c) 0 sin(c);0 1 0;-sin(c) 0 cos(c)];
R34=[ cos(d) 0 sin(d);0 1 0; -sin(d) 0 cos(d)];
R45=[ cos(f) -sin(f) 0;sin(f) cos(f) 0;0 0 1];
L1=3;
L2=3;
L3=3;
L4=3;
L5=3;
L6=3;
O_0=[0;0;0];
r_OA_0 = [0;0;L1];
r_AB_1 = [0;0;L2];
r_BC_2 = [0;0;L3];
r_CD_3 = [0;0;L4];
r_DE_4 = [0;0;L5];
r_EF_5 = [0;0;L6];
r_OB_0 = r_OA_0 + R01*r_AB_1;
r_OC_0 = r_OB_0 + R01*R12*r_BC_2;
r_OD_0 = r_OC_0 + R01*R12*R23*r_CD_3;
r_OE_0 = r_OD_0 + R01*R12*R23*R34*r_DE_4;
r_OF_0 = r_OE_0 + R01*R12*R23*R34*R45*r_EF_5;
Link1 = [O_0 r_OA_0];
Link2 = [r_OA_0, r_OB_0];
Link3 = [r_OB_0, r_OC_0];
Link4 = [r_OC_0, r_OD_0];
Link5 = [r_OD_0, r_OE_0];
Link6 = [r_OE_0, r_OF_0];
hold on
grid on
view(45, 30);
axis square;
plot3(Link1(1,:), Link1(2,:), Link1(3,:), 'LineWidth', 3, 'color', 'r');
plot3(Link2(1,:), Link2(2,:), Link2(3,:), 'LineWidth', 3, 'color', 'b');
plot3(Link3(1,:), Link3(2,:), Link3(3,:), 'LineWidth', 3, 'color', 'r');
plot3(Link4(1,:), Link4(2,:), Link4(3,:), 'LineWidth', 3, 'color', 'b');
plot3(Link5(1,:), Link5(2,:), Link5(3,:), 'LineWidth', 3, 'color', 'r');
plot3(Link6(1,:), Link6(2,:), Link6(3,:), 'LineWidth', 3, 'color', 'b');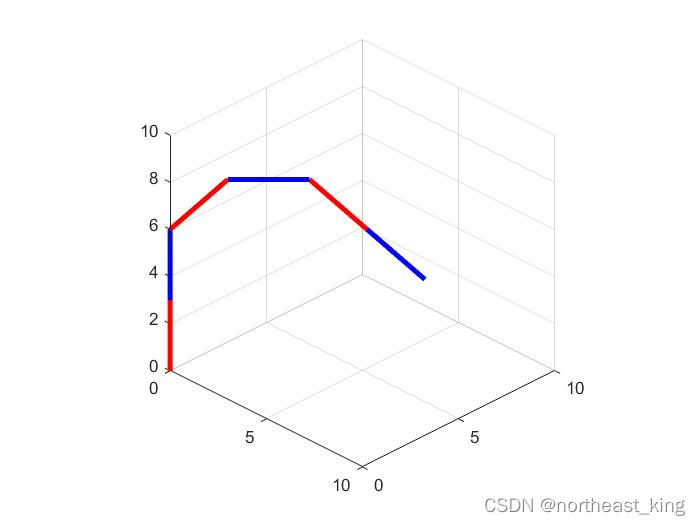















 1922
1922











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









