






0 引言
OUR机械臂有别于传统工业机械臂,其特点是体积小、重量轻、有很快的运动速度和较大的活动范围,机械臂的最大运动速度可以达到180°/s,能够处理更复杂、更危险的工作,具有极强的灵活度、精确度和安全性。
对于机械臂运动学而言,正运动学相对简单,机械臂的工作空间求解方法主要有图解法、解析法、数值法,以及由数值法衍生出来的蒙特卡洛法[1]。图解法和解析法受到关节数目的限制,对于有些机械臂并不通用;数值法计算量太大,有些边界曲面可靠性得不到保证[2]。蒙特卡洛法可以用数学图形的形式直观清晰地表示机械臂的工作空间。本文采用J.Craij改进的D-H方法建立机械臂的连杆坐标系,分析OUR-2机械臂的正运动学模型,得到机械臂正运动学的解析解,并利用MATLAB robotics toolbox进行正运动学仿真分析,运用蒙特卡洛法得到机械臂的工作空间。
1 正运动学分析
1.1 机械臂模型
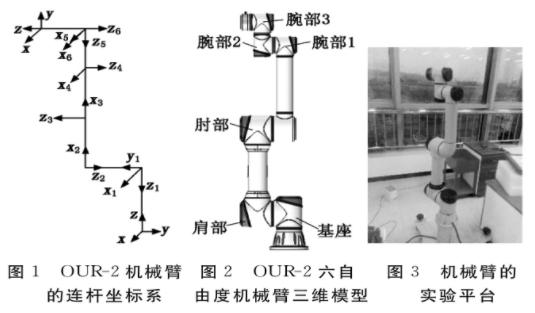
按照改进的D-H方法建立OUR-2六自由度机械臂的连杆坐标系。首先确定基坐标系的位置以及末端的初始位置和姿态,然后采用D-H法建立基坐标系和各关节处的坐标系,对于相同的基坐标系,不同的D-H矩阵的末端位姿相同。建立的OUR-2机械臂连杆坐标系如图1所示。
利用SolidWorks建立了OUR-2六自由度机械臂三维模型,如图2所示。机械臂共包括6个部分:基座、肩部、肘部、腕部1、腕部2以及腕部3。OUR-2有别于传统的六自由度机械臂,6个关节均为模块化旋转关节,每个模块均由高性能的伺服电机、谐波减速器、机械刹车、驱动器和通信总线组成,每个关节有一个自由度,机械臂的实验平台如图3所示。
1.2 机械臂正运动学分析
机械臂的工作空间是指机械臂末端所能到的范围,是机械臂灵活性的重要指标,理论上机械臂的工作空间是一个可以覆盖机械臂所在位置的球形区域[3],实际上由于奇点的存在,使得机械臂的灵活性和空间工作范围受到限制,如何扩大机械臂的工作空间以及增强它的灵活性是一个重要的研究方向。机械臂的运动学涉及末端位姿和关节变量,是空间分析的一个重要基础[4]。
根据
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1719
1719











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









