






一 推陈出新
- 采用连续的3x3的卷积核代替AlexNet中的较大卷积核(11x11,7x7,5x5),2 个 3x3 的卷积核叠加,它们的感受野等同于 1 个 5x5 的卷积核,3 个 3x3 的卷积核叠加后,它们的感受野等同于 1 个 7x7 的效果,所以使用3x3卷积核堆叠的形式,既增加了网络层数又减少了参数量。
- 引入了1x1卷积核,实现了在保持feature map 尺寸不变(即不损失分辨率)的前提下,大幅增加非线性表达能力,加深了网络层数。同时,可以进行卷积核通道数的降维和升维。
二 渐入佳境
首先请明确,该网络共有16层(13个卷积层 + 3个全连接),如下图所示:
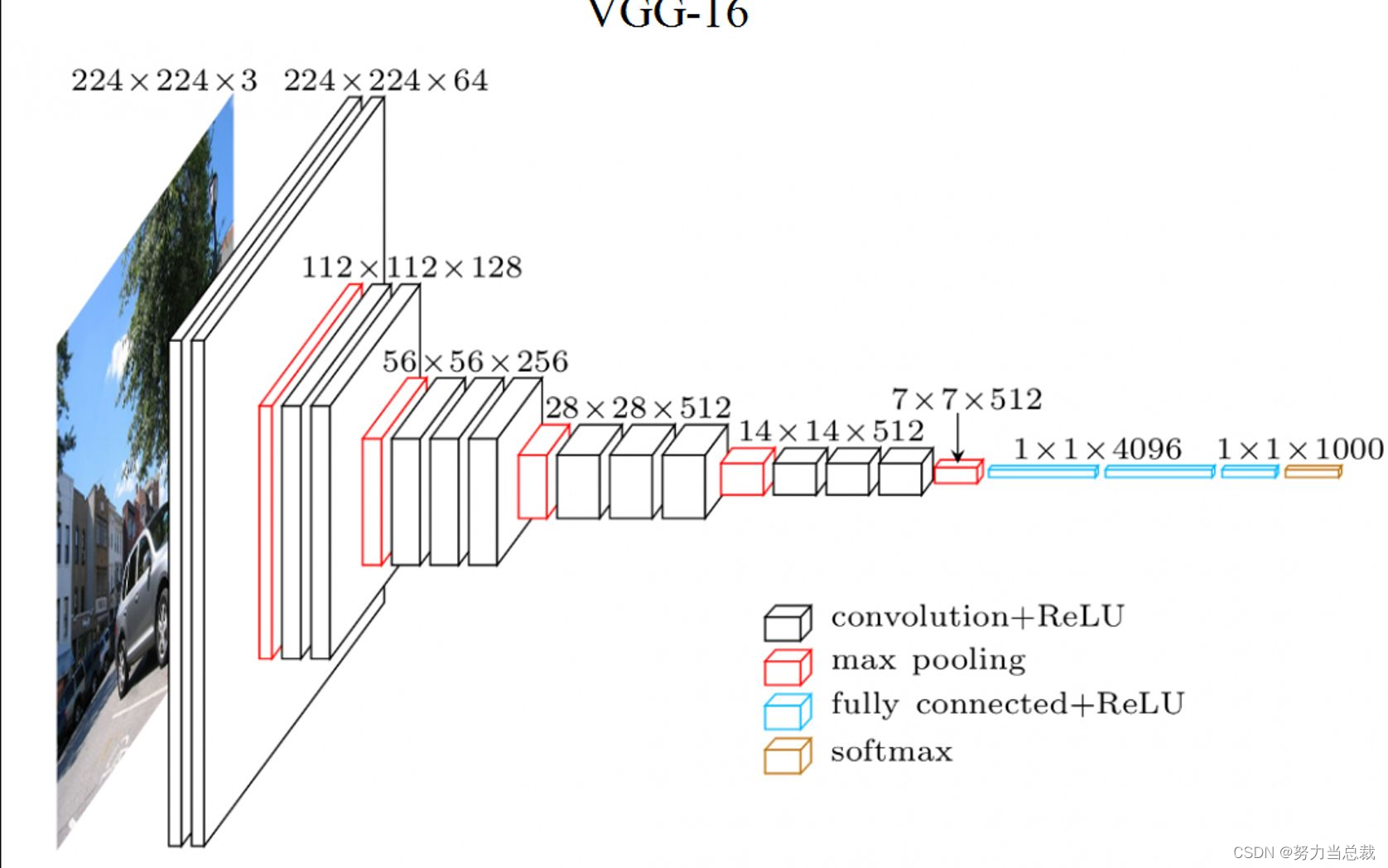
[注]上图是从百度图片中截取的,我们总是站在巨人的肩膀上,才会有更多的时间去约会,感谢这位作者!
接下来对每一层进行梳理:
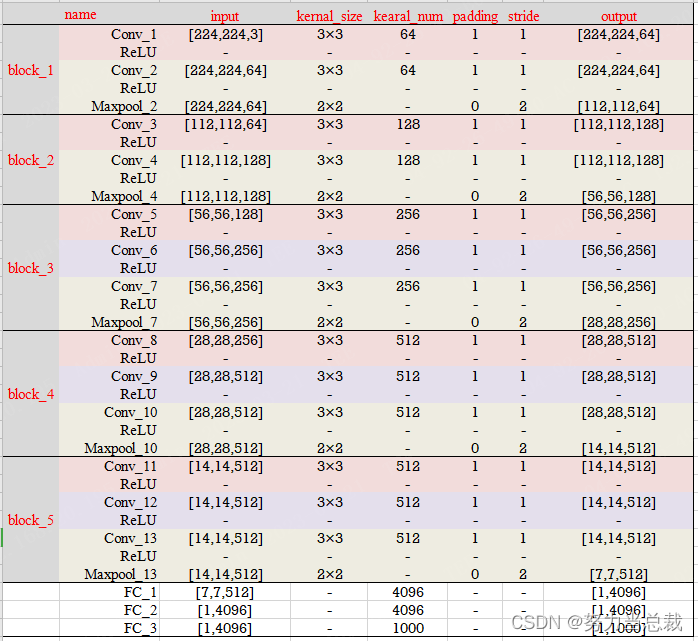
【注】我还在亏……躺平了。上表的参数核实了几遍,但也不保证准确无误。抱歉!
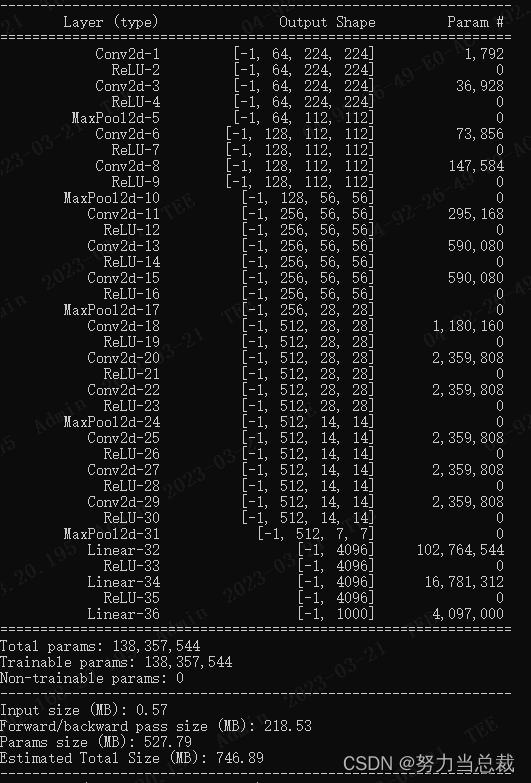
利用summary()函数打印网络结构和参数
block-1
1-0 卷积层
输入图像:224*224*3
【图像的长*宽*通道数】
卷 积 核:
尺寸信息:3*3*3
【滑动窗口/卷积核的长*宽*通道数,其中通道数默认与上一层的输入通道数一致】
数量: 64
【一般结合GPU硬件的配置,按照16的倍数递增】
步 长:stride= 1
填 充 值:padding = 1
输出特征图:224*224*64
【特征图尺寸计算公式:(图像尺寸-卷积核尺寸 + 2*填充值)/步长+1】
【即 (224-3 + 2*1)/1+1 = 224】
【64 为通道数,由该卷积层的卷积核数量决定 】
参数量:(3x3x3+1)x64=1792
【3x3x3为卷积核,1为偏置参数,64为卷积核个数】
1-1 激活函数
ReLU
———————————————————————————————————————————
2-0 卷积层
输入特征图:224*224*64
卷 积 核:
尺寸信息:3*3*64
数量: 64
步 长:stride= 1
填 充 值:padding = 1
输出特征图:224*224*64
【即 (224-3 + 2*1)/1+1 = 224 】
参数量:(3x3x64+1)x64=36928
2-1 激活函数
ReLU
2-2 池化层
输入特征图:224*224*64
池 化 核:3*3*1
步 长: stride = 2
填 充 值: padding = 0
输出特征图:112*112*64
【即 (224-2 + 2*0)/2+1 = 112】
———————————————————————————————————————————
block-2
3-0 卷积层
输入特征图:112*112*64
卷 积 核:
尺寸信息:3*3*64
数量:128
步 长:stride= 1
填 充 值:padding = 1
输出特征图:112*112*128
【即 (112-3+ 2*1)/1+1 = 112】
参数量:(3x3x64+1)x128=73856
3-1 激活函数
ReLU
———————————————————————————————————————————
4-0 卷积层
输入特征图:112*112*128
卷 积 核:
尺寸信息:3*3*128
数量:128
步 长:stride= 1
填 充 值:padding = 1
输出特征图:112*112*128
【即 (112-3+ 2*1)/1+1 = 112】
参数量:(3x3x128+1)x128=7147584
4-1 激活函数
ReLU
4-2 池化层
输入特征图:112*112*128
池 化 核:3*3*1
步 长: stride = 2
填 充 值: padding = 0
输出特征图:56*56*128
【即 (112-2+ 2*0)/2+1 = 56】
———————————————————————————————————————————
block-3
5-0 卷积层
输入特征图:56*56*128
卷 积 核:
尺寸信息:3*3*128
数量: 256
步 长:stride= 1
填 充 值:padding = 1
输出特征图:56*56*256
【即 (56-3+ 2*1)/1+1 = 56 】
参数量:(3x3x128+1)x256=295168
5-1 激活函数
ReLU
———————————————————————————————————————————
6-0 卷积层
输入特征图:56*56*256
卷 积 核:
尺寸信息:3*3*256
数量: 256
步 长:stride= 1
填 充 值:padding = 1
输出特征图:56*56*256
【即 (56-3+ 2*1)/1+1 = 56 】
参数量:(3x3x256+1)x256=589824
6-1 激活函数
ReLU
———————————————————————————————————————————
7-0 卷积层
输入特征图:56*56*256
卷 积 核:
尺寸信息:3*3*256
数量: 256
步 长:stride= 1
填 充 值:padding = 1
输出特征图:56*56*256
【即 (56-3+ 2*1)/1+1 = 56 】
参数量:(3x3x256+1)x256=589824
7-1 激活函数
ReLU
7-2 池化层
输入特征图:56*56*256
池 化 核:3*3*1
步 长: stride = 2
填 充 值: padding = 0
输出特征图:28*28*256
【即 (56-2 + 2*0)/2+1 = 28】
———————————————————————————————————————————
block-4
8-0 卷积层
输入特征图:28*28*256
卷 积 核:
尺寸信息:3*3*256
数量: 512
步 长:stride= 1
填 充 值:padding = 1
输出特征图:28*28*512
【即 (28-3+ 2*1)/1+1 = 28 】
参数量:(3x3x256+1)x512=1179648
8-1 激活函数
ReLU
———————————————————————————————————————————
9-0 卷积层
输入特征图:28*28*512
卷 积 核:
尺寸信息:3*3*512
数量: 512
步 长:stride= 1
填 充 值:padding = 1
输出特征图:28*28*512
【即 (28-3+ 2*1)/1+1 = 28】
参数量:(3x3x512+1)x512=2359808
9-1 激活函数
ReLU
———————————————————————————————————————————
10-0 卷积层
输入特征图:28*28*512
卷 积 核:
尺寸信息:3*3*512
数量:512
步 长:stride= 1
填 充 值:padding = 1
输出特征图:28*28*512
【即 (28-3+ 2*1)/1+1 = 28 】
参数量:(3x3x512+1)x512=2359808
10-1 激活函数
ReLU
10-2 池化层
输入特征图:28*28*512
池 化 核:3*3*1
步 长: stride = 2
填 充 值: padding = 0
输出特征图:14*14*512
【即 (28-2 + 2*0)/2+1 = 14 】
———————————————————————————————————————————
block-5
11-0 卷积层
输入特征图:14*14*512
卷 积 核:
尺寸信息:3*3*512
数量: 512
步 长:stride= 1
填 充 值:padding = 1
输出特征图:14*14*512
【即 (14-3+ 2*1)/1+1 = 14 】
参数量:(3x3x512+1)x512=2359808
11-1 激活函数
ReLU
———————————————————————————————————————————
12-0 卷积层
输入特征图:14*14*512
卷 积 核:
尺寸信息:3*3*512
数量: 512
步 长:stride= 1
填 充 值:padding = 1
输出特征图:14*14*512
【即 (14-3+ 2*1)/1+1 = 14】
参数量:(3x3x512+1)x512=2359808
12-1 激活函数
ReLU
———————————————————————————————————————————
13-0 卷积层
输入特征图:14*14*512
卷 积 核:
尺寸信息:3*3*512
数量:512
步 长:stride= 1
填 充 值:padding = 1
输出特征图:14*14*512
【即 (14-3+ 2*1)/1+1 = 14】
参数量:(3x3x512+1)x512=2359808
13-1 激活函数
ReLU
13-2 池化层
输入特征图:14*14*512
池 化 核:3*3*1
步 长: stride = 2
填 充 值: padding = 0
输出特征图:7*7*512
【即 (14-2 + 2*1)/2+1 = 7 】
———————————————————————————————————————————
14-0 全连接层
输入特征图:7*7*512
卷 积 核:
尺寸信息:7*7*512
数量: 4096
步 长:stride= 0
填 充 值:padding = 0
输出特征图:1*1*4096
【即 (7-7+ 2*0)/1+1 = 1 】
参数量:(7x7x512+1)x4096=102764544
14-1 激活函数
ReLU
———————————————————————————————————————————
15-0 全连接层
输入特征图:1*1*4096
参数量:(4096+1)x4096=16781312
15-1 激活函数
ReLU
———————————————————————————————————————————
16-0 输出层
输入特征图:1*1*4096
参数量:1000x4096=4096000
16-1 分类映射
Softmax:将输入映射为0-1之间的实数,并且归一化保证和为1,因此多分类的概率之和也刚好为1。也就是说,分类问题是一个非黑即白的场景,要么是A,要么是B,要么是C,但是我们想知道更多的信息,于是通过softmax函数输出是A的概率(假设是0.88),是B的概率(假设是0.08),是C的概率(假设是0.01)。 [注]上图是从百度图片中截取的,感谢这位作者!
———————————————————————————————————————————
三 千里之行 始于手巧代码
1 CIAFR10_数据集加载
import torchvision
import torchvision.transforms as transforms
batchSize = 128 # 该参数根据计算机性能可修改
normalize = transforms.Normalize([0.5, 0.5, 0.5], [0.5, 0.5, 0.5]) # 将图像的像素值归一化到[-1,1]之间
# Compose将多个transforms的操作整合在一起
data_transform = transforms.Compose([
transforms.Resize((224,224)),
transforms.ToTensor(),
normalize()])
trainset = torchvision.datasets.CIFAR10(root='./Cifar-10',
train=True, download=True, transform=data_transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=batchSize, shuffle=True)
testset = torchvision.datasets.CIFAR10(root='./Cifar-10',
train=False, download=True, transform=data_transform)
testloader = torch.utils.data.DataLoader(testset, batch_size=batchSize, shuffle=False)
2 模型搭建
- 初阶代码
import torch
import torch.nn as nn
import torch.functional as F
from torchsummary import summary
class VGG16(nn.Module):
def __init__(self, in_channels =1, num_classes=1000):
super(VGG16,self).__init__()
# block_1
self.c1=nn.Conv2d(in_channels=in_channels,out_channels=64,kernel_size=3,stride=1,padding=1)
self.a1=nn.ReLU(inplace=True)
self.c2=nn.Conv2d(64,64,3,stride=1,padding=1)
self.a2=nn.ReLU(inplace=True)
self.p2=nn.MaxPool2d(kernel_size=2,stride=2,padding = 0)
# block_2
self.c3=nn.Conv2d(64,128,3,stride=1,padding=1)
self.a3=nn.ReLU(inplace=True)
self.c4=nn.Conv2d(128,128,3,stride=1,padding=1)
self.a4=nn.ReLU(inplace=True)
self.p4=nn.MaxPool2d(kernel_size=2,stride=2,padding = 0)
# block_3
self.c5=nn.Conv2d(128,256,3,stride=1,padding=1)
self.a5=nn.ReLU(inplace=True)
self.c6=nn.Conv2d(256,256,3,stride=1,padding=1)
self.a6=nn.ReLU(inplace=True)
self.c7=nn.Conv2d(256,256,3,stride=1,padding=1)
self.a7=nn.ReLU(inplace=True)
self.p7=nn.MaxPool2d(kernel_size=2,stride=2,padding = 0)
# block_4
self.c8=nn.Conv2d(256,512,3,stride=1,padding=1)
self.a8=nn.ReLU(inplace=True)
self.c9=nn.Conv2d(512,512,3,stride=1,padding=1)
self.a9=nn.ReLU(inplace=True)
self.c10=nn.Conv2d(512,512,3,stride=1,padding=1)
self.a10=nn.ReLU(inplace=True)
self.p10=nn.MaxPool2d(kernel_size=2,stride=2,padding = 0)
# block_5
self.c11=nn.Conv2d(512,512,3,stride=1,padding=1)
self.a11=nn.ReLU(inplace=True)
self.c12=nn.Conv2d(512,512,3,stride=1,padding=1)
self.a12=nn.ReLU(inplace=True)
self.c13=nn.Conv2d(512,512,3,stride=1,padding=1)
self.a13=nn.ReLU(inplace=True)
self.p13=nn.MaxPool2d(kernel_size=2,stride=2,padding = 0)
self.fc1_d=nn.Dropout(p=0.5)
self.fc1=nn.Linear(512*7*7,4096)
self.fc1_a=nn.ReLU(inplace=True)
self.fc2_d=nn.Dropout(p=0.5)
self.fc2=nn.Linear(4096,4096)
self.fc2_a=nn.ReLU(inplace=True)
self.fc3=nn.Linear(4096,num_classes)
def forward(self,x):
x = self.c1(x)
x = self.a1(x)
x = self.c2(x)
x = self.a2(x)
x = self.p2(x)
x = self.c3(x)
x = self.a3(x)
x = self.c4(x)
x = self.a4(x)
x = self.p4(x)
x = self.c5(x)
x = self.a5(x)
x = self.c6(x)
x = self.a6(x)
x = self.c7(x)
x = self.a7(x)
x = self.p7(x)
x = self.c8(x)
x = self.a8(x)
x = self.c9(x)
x = self.a9(x)
x = self.c10(x)
x = self.a10(x)
x = self.p10(x)
x = self.c11(x)
x = self.a11(x)
x = self.c12(x)
x = self.a12(x)
x = self.c13(x)
x = self.a13(x)
x = self.p13(x)
x=torch.flatten(x,start_dim=1)
x = self.fc1_d(x)
x = self.fc1(x)
x = self.fc1_a(x)
x = self.fc2_d(x)
x = self.fc2(x)
x = self.fc2_a(x)
x=self.fc3(x)
return x
# 打印模型结构
model =VGG16(in_channels = 3, num_classes = 10)
summary(model, input_size=(3, 224, 224))
- 高阶代码
from pyexpat import features
import torch.nn as nn
import torch
# VGG网络结构根据不同深度有四个版本,VGG11/13/16/19
# 我们试图在搭建网络的时候能够总结多种版本的VGG网络结构规律,用最少的代码行实现公共结构的复现,从而实现装B的梦想。
# VGG分为两个部分:一是特征提取网络,二是映射分类网络。
# 定义VGG类
class VGG(nn.Module):
# 两个参数:features和num_classes
def __init__(self, features, num_classes=1000):
super(VGG, self).__init__()
# 特征提取网络:包含卷积运算+激活函数+池化操作
self.features = features
# 映射分类网络:包含Dropout+全连接层+激活函数
# 这部分层数较少,可直接罗列。
# 以指定的运算传递顺序添加到序列容器nn.Sequential()中,在前向传播时自动调用forward()方法,无需再定义。
self.classifier = nn.Sequential(
nn.Dropout(p=0.5),
nn.Linear(512*7*7, 4096),
nn.ReLU(True),
nn.Dropout(p=0.5),
nn.Linear(4096, 4096),
nn.ReLU(True),
nn.Linear(4096, num_classes)
)
# 定义网络结构的运算传递顺序/关系
def forward(self, x):
x = self.features(x)
x = torch.flatten(x, start_dim=1)
x = self.classifier(x)
return x
# 定义VGG不同结构的配置列表,json格式{字典},依照顺序,依次抽不同网络中的重要参数
# 观察发现,区别在于卷积核:不同层的个数有所不同
# 依照顺序,数字表示卷积核个数(等价于输入/输出特征图的通道数),'M'表示最大池化层
model_names = {
'vgg11': [64, 'M', 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M'],
'vgg13': [64, 64, 'M', 128, 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M'],
'vgg16': [64, 64, 'M', 128, 128, 'M', 256, 256, 256, 'M', 512, 512, 512, 'M', 512, 512, 512, 'M'],
'vgg19': [64, 64, 'M', 128, 128, 'M', 256, 256, 256, 256, 'M', 512, 512, 512, 512, 'M', 512, 512, 512, 512, 'M'],
}
# 定义特征提取网络函数
# 传入参数有两个:int类型的in_channels、列表类型的 model_name
def make_features( in_channels, model_name ):
model_name = model_name
# 定义一个用于存储特征提取网络层的列表
layers = []
in_channels = in_channels
# 有序遍历配置列表
for v in model_name:
# 以池化操作为界限
# 当配置列表中出现'M'时,向特征提取网络层中增加一层池化
if v == "M":
layers += [nn.MaxPool2d(kernel_size=2, stride=2)]
# 否则,向特征提取网络层中增加一层卷积运算+激活函数
# 并更新通道数,因为当前层的feature输出通道=下一层feature的输入通道
else:
conv2d = nn.Conv2d(in_channels, v, kernel_size=3, padding=1)
layers += [conv2d, nn.ReLU(True)]
in_channels = v
# 将特征提取网络层的列表添加到序列容器nn.Sequential()中
return nn.Sequential(*layers)
# 到此为止,我们装B成功,相比初阶代码,我们少敲了2/3的代码。!
if __name__ == '__main__':
in_channels = 3
model_name = model_names["vgg16"]
model = VGG(make_features(in_channels, model_name), num_classes=10)
print(model)
3 模型训练
from torch.optim import lr_scheduler
from tqdm import tqdm
# 优先调用 GPU
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
# 超参数设置
n_epochs = 100
in_channels = 3
num_classes = 10
learning_rate = 0.0001 #学习率,优化器迭代的步长
momentum = 0.9 # 动量因子,用来矫正优化率,可选参数
# 实例化模型
model = VGG16(in_channels = in_channels, num_classes = num_classes)
model = model.to(device)
# 定义损失函数(交叉熵损失)
criterion = torch.nn.CrossEntropyLoss()
# 定义优化器(随机梯度下降法)
optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate, momentum = momentum)
# 动态调整学习率:每隔10轮变为原来的0.5。
# 其中StepLR()用于调整学习率,一般情况下会设置随着epoch的增大而逐渐减小,从而达到更好的训练效果。
lr_scheduler = lr_scheduler.StepLR(optimizer, step_size=10, gamma=0.5)
# 开始训练模型
for epoch in range(n_epochs):
running_loss = 0.0
running_correct = 0
print("Epoch {}/{}".format(epoch, n_epochs))
print("-"*10)
# 读取数据
# for data in tqdm(trainloader): # 可自动生成进度条
for data in trainloader:
X_train, y_train = data
X_train, y_train = X_train.cuda(), y_train.cuda()
# 计算训练值
outputs = model(X_train)
# torch.max(input, dim)函数会返回两个tensor,第一个tensor是每行的最大值;第二个tensor是每行最大值的索引
_,pred = torch.max(outputs.data, 1)
# 计算观测值(label)与训练值的损失函数
loss = criterion(outputs, y_train)
###————————————————————————————————————————————————————————————
# 反向传播部分
# 梯度归零
optimizer.zero_grad()
# 反向传播,计算当前梯度
loss.backward()
# 根据梯度更新网络参数
optimizer.step()
# item()得到元素张量的元素值
running_loss += loss.data.item()
running_correct += torch.sum(pred == y_train.data)
# 验证模型
testing_correct = 0
for data in testloader:
X_test, y_test = data
X_test, y_test = X_test.cuda(), y_test.cuda()
# eval():如果模型中有Batch Normalization和Dropout,则不启用,以防改变权值
# model.eval()
# 进行预测
outputs = model(X_test)
_, pred = torch.max(outputs.data, 1)
testing_correct += torch.sum(pred == y_test.data)
print("Loss is:{:.4f}, Train Accuracy is:{:.4f}%, Test Accuracy is:{:.4f}".format(torch.true_divide(running_loss, len(trainset)),
torch.true_divide(100*running_correct, len(trainset)),
torch.true_divide(100*testing_correct, len(testset))))
torch.save(model.state_dict(), "model_parameter.pkl")
4 模型预测
5 完整代码
- 初阶代码
import torch
import torch.nn as nn
import torch.functional as F
import torchvision
import torchvision.transforms as transforms
import tqdm
from torch.optim import lr_scheduler
from torchsummary import summary
class VGG16(nn.Module):
def __init__(self, in_channels =1, num_classes=1000):
super(VGG16,self).__init__()
# block_1
self.c1=nn.Conv2d(in_channels=in_channels,out_channels=64,kernel_size=3,stride=1,padding=1)
self.a1=nn.ReLU(inplace=True)
self.c2=nn.Conv2d(64,64,3,stride=1,padding=1)
self.a2=nn.ReLU(inplace=True)
self.p2=nn.MaxPool2d(kernel_size=2,stride=2,padding = 0)
# block_2
self.c3=nn.Conv2d(64,128,3,stride=1,padding=1)
self.a3=nn.ReLU(inplace=True)
self.c4=nn.Conv2d(128,128,3,stride=1,padding=1)
self.a4=nn.ReLU(inplace=True)
self.p4=nn.MaxPool2d(kernel_size=2,stride=2,padding = 0)
# block_3
self.c5=nn.Conv2d(128,256,3,stride=1,padding=1)
self.a5=nn.ReLU(inplace=True)
self.c6=nn.Conv2d(256,256,3,stride=1,padding=1)
self.a6=nn.ReLU(inplace=True)
self.c7=nn.Conv2d(256,256,3,stride=1,padding=1)
self.a7=nn.ReLU(inplace=True)
self.p7=nn.MaxPool2d(kernel_size=2,stride=2,padding = 0)
# block_4
self.c8=nn.Conv2d(256,512,3,stride=1,padding=1)
self.a8=nn.ReLU(inplace=True)
self.c9=nn.Conv2d(512,512,3,stride=1,padding=1)
self.a9=nn.ReLU(inplace=True)
self.c10=nn.Conv2d(512,512,3,stride=1,padding=1)
self.a10=nn.ReLU(inplace=True)
self.p10=nn.MaxPool2d(kernel_size=2,stride=2,padding = 0)
# block_5
self.c11=nn.Conv2d(512,512,3,stride=1,padding=1)
self.a11=nn.ReLU(inplace=True)
self.c12=nn.Conv2d(512,512,3,stride=1,padding=1)
self.a12=nn.ReLU(inplace=True)
self.c13=nn.Conv2d(512,512,3,stride=1,padding=1)
self.a13=nn.ReLU(inplace=True)
self.p13=nn.MaxPool2d(kernel_size=2,stride=2,padding = 0)
# self.fc1_d=nn.Dropout(p=0.5)
self.fc1=nn.Linear(512*7*7,4096)
self.fc1_a=nn.ReLU(inplace=True)
# self.fc2_d=nn.Dropout(p=0.5)
self.fc2=nn.Linear(4096,4096)
self.fc2_a=nn.ReLU(inplace=True)
self.fc3=nn.Linear(4096,num_classes)
def forward(self,x):
x = self.c1(x)
x = self.a1(x)
x = self.c2(x)
x = self.a2(x)
x = self.p2(x)
x = self.c3(x)
x = self.a3(x)
x = self.c4(x)
x = self.a4(x)
x = self.p4(x)
x = self.c5(x)
x = self.a5(x)
x = self.c6(x)
x = self.a6(x)
x = self.c7(x)
x = self.a7(x)
x = self.p7(x)
x = self.c8(x)
x = self.a8(x)
x = self.c9(x)
x = self.a9(x)
x = self.c10(x)
x = self.a10(x)
x = self.p10(x)
x = self.c11(x)
x = self.a11(x)
x = self.c12(x)
x = self.a12(x)
x = self.c13(x)
x = self.a13(x)
x = self.p13(x)
x=torch.flatten(x,start_dim=1)
x = self.fc1(x)
x = self.fc1_a(x)
x = self.fc2(x)
x = self.fc2_a(x)
x=self.fc3(x)
return x
if __name__ == '__main__':
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
batchSize = 128
normalize = transforms.Normalize([0.5, 0.5, 0.5], [0.5, 0.5, 0.5])
data_transform = transforms.Compose([
transforms.Resize((224,224)),
transforms.ToTensor(),
normalize()])
trainset = torchvision.datasets.CIFAR10(root='./Cifar-10',
train=True, download=True, transform=data_transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=batchSize, shuffle=True)
testset = torchvision.datasets.CIFAR10(root='./Cifar-10',
train=False, download=True, transform=data_transform)
testloader = torch.utils.data.DataLoader(testset, batch_size=batchSize, shuffle=False)
model = VGG16(in_channels = 3, num_classes = 10).to(device)
n_epochs = 40
num_classes = 10
learning_rate = 0.0001
momentum = 0.9
criterion = torch.nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate)
lr_scheduler = lr_scheduler.StepLR(optimizer, step_size=10, gamma=0.5)
for epoch in range(n_epochs):
print("Epoch {}/{}".format(epoch, n_epochs))
print("-"*10)
running_loss = 0.0
running_correct = 0
for data in trainloader:
X_train, y_train = data
X_train, y_train = X_train.cuda(), y_train.cuda()
outputs = model(X_train)
loss = criterion(outputs, y_train)
_,pred = torch.max(outputs.data, 1)
optimizer.zero_grad()
loss.backward()
optimizer.step()
running_loss += loss.data.item()
running_correct += torch.sum(pred == y_train.data)
testing_correct = 0
for data in testloader:
X_test, y_test = data
X_test, y_test = X_test.cuda(), y_test.cuda()
outputs = model(X_test)
_, pred = torch.max(outputs.data, 1)
testing_correct += torch.sum(pred == y_test.data)
print("Loss is:{:.4f}, Train Accuracy is:{:.4f}%, Test Accuracy is:{:.4f}".format(torch.true_divide(running_loss, len(trainset)),
torch.true_divide(100*running_correct, len(trainset)),
torch.true_divide(100*testing_correct, len(testset))))
torch.save(model.state_dict(), "model_parameter.pkl")
- 高阶代码
import torch
import torch.nn as nn
import torch.functional as F
import torchvision
import torchvision.transforms as transforms
import tqdm
from torch.optim import lr_scheduler
from torchsummary import summary
class VGG(nn.Module):
def __init__(self, features, num_classes=1000):
super(VGG, self).__init__()
self.features = features
self.classifier = nn.Sequential(
nn.Dropout(p=0.5),
nn.Linear(512*7*7, 2048),
nn.ReLU(True),
nn.Dropout(p=0.5),
nn.Linear(2048, 2048),
nn.ReLU(True),
nn.Linear(2048, num_classes)
)
def forward(self, x):
x = self.features(x)
x = torch.flatten(x, start_dim=1)
x = self.classifier(x)
return x
model_names = {
'vgg11': [64, 'M', 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M'],
'vgg13': [64, 64, 'M', 128, 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M'],
'vgg16': [64, 64, 'M', 128, 128, 'M', 256, 256, 256, 'M', 512, 512, 512, 'M', 512, 512, 512, 'M'],
'vgg19': [64, 64, 'M', 128, 128, 'M', 256, 256, 256, 256, 'M', 512, 512, 512, 512, 'M', 512, 512, 512, 512, 'M'],
}
def make_features( in_channels, model_name):
model_name = model_name
layers = []
in_channels = in_channels
for v in model_name:
if v == "M":
layers += [nn.MaxPool2d(kernel_size=2, stride=2)]
else:
conv2d = nn.Conv2d(in_channels, v, kernel_size=3, padding=1)
layers += [conv2d, nn.ReLU(True)]
in_channels = v
return nn.Sequential(*layers)
if __name__ == '__main__':
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
batchSize = 64
normalize = transforms.Normalize([0.5, 0.5, 0.5], [0.5, 0.5, 0.5])
data_transform = transforms.Compose([
transforms.Resize((224,224)),
transforms.ToTensor(),
normalize()])
trainset = torchvision.datasets.CIFAR10(root='./Cifar-10',
train=True, download=True, transform=data_transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=batchSize, shuffle=True)
testset = torchvision.datasets.CIFAR10(root='./Cifar-10',
train=False, download=True, transform=data_transform)
testloader = torch.utils.data.DataLoader(testset, batch_size=batchSize, shuffle=False)
in_channels = 3
model_name = model_names["vgg16"]
model = VGG(make_features(in_channels, model_name), num_classes=10)
n_epochs = 40
num_classes = 10
learning_rate = 0.0001
momentum = 0.9
criterion = torch.nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate)
lr_scheduler = lr_scheduler.StepLR(optimizer, step_size=10, gamma=0.5)
for epoch in range(n_epochs):
print("Epoch {}/{}".format(epoch, n_epochs))
print("-"*10)
running_loss = 0.0
running_correct = 0
for data in trainloader:
X_train, y_train = data
X_train, y_train = X_train.cuda(), y_train.cuda()
outputs = model(X_train)
loss = criterion(outputs, y_train)
_,pred = torch.max(outputs.data, 1)
optimizer.zero_grad()
loss.backward()
optimizer.step()
running_loss += loss.data.item()
running_correct += torch.sum(pred == y_train.data)
testing_correct = 0
for data in testloader:
X_test, y_test = data
X_test, y_test = X_test.cuda(), y_test.cuda()
outputs = model(X_test)
_, pred = torch.max(outputs.data, 1)
testing_correct += torch.sum(pred == y_test.data)
print("Loss is:{:.4f}, Train Accuracy is:{:.4f}%, Test Accuracy is:{:.4f}".format(torch.true_divide(running_loss, len(trainset)),
torch.true_divide(100*running_correct, len(trainset)),
torch.true_divide(100*testing_correct, len(testset))))
torch.save(model.state_dict(), "model_parameter.pkl")
















 7269
7269











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











