







一、直流无刷基本原理
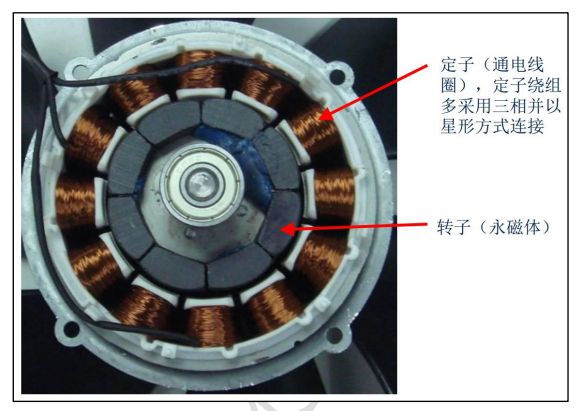
1.1 无刷电机结构
无刷电机基本组成部分如图
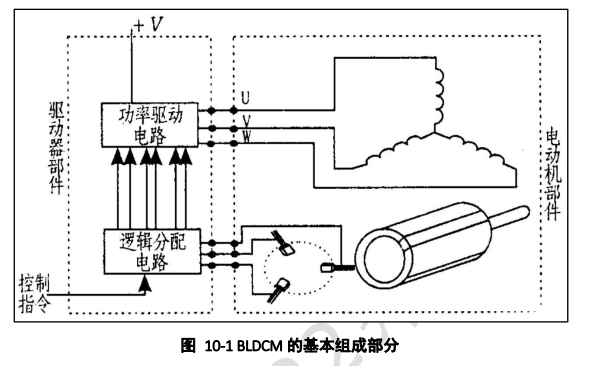
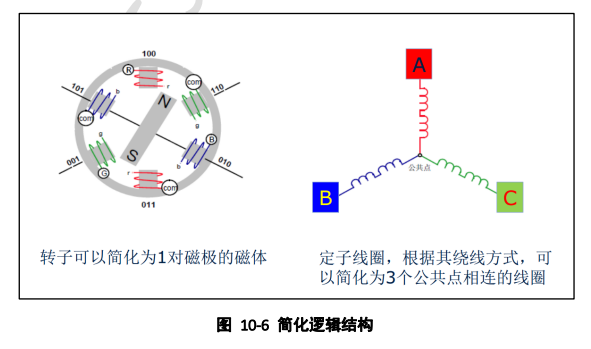
其中电机内部结构如下,中间的 S/N 是转子,外侧的铁环是定子,通过改变电磁铁的通电方式即可使得电机旋转。其中的 A、B、C 一般被称为 U、V、W三个项。
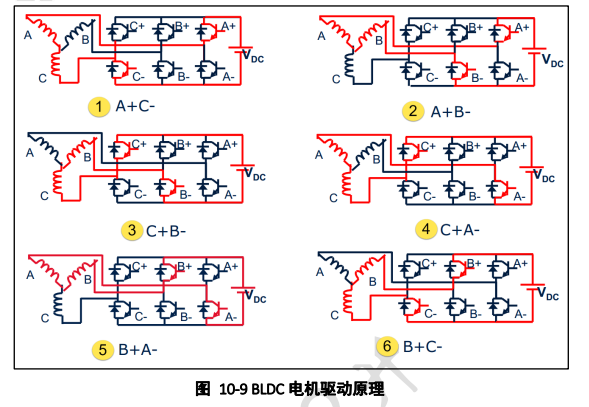
1.2 六步换向
如果要使得无刷电机做到最基本的转动只需要控制六个 MOS 管通断顺序即可。
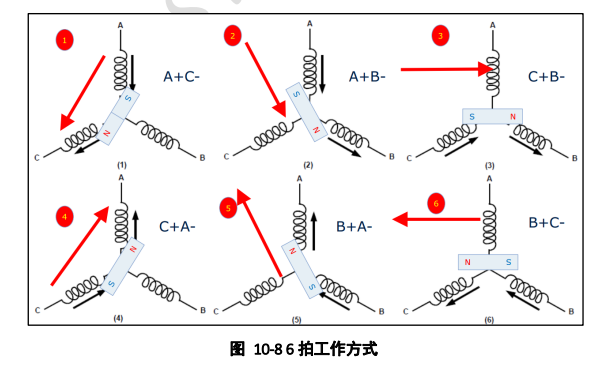
想要控制 BLDC 旋转,根本的问题就是产生这 6 拍工作方式的电压信号(称为 BLDC 的六步控制)。
举个例子来说明,假定一个 BLDC 的额定电压为 24V,电机三根线就定义为 A、B、C:
- 为 A 接 24V、B 悬空、C 接 GND,此时对应图 10-8 中①,电机转轴 被固定在一个位置;
- 在(1)的基础上,我们修改接线方式,为 A 接 24V、B 接 GND、C 悬空此时对应图 10-8 中的②,电机转轴就在(1)基础上旋转一个角度,达到另外一个位置;
- 在(2)的基础上,我们修改接线方式,为 A 悬空、B 接 GND、C 接 24V,此时对应图 10-8 中的③,电机转轴就在(2)基础上旋转一个角度,达到另外一 个位置;
- 在(3)的基础上,我们修改接线方式,为 A 接 GND、B 悬空、C 接 24V,此时对应图 10-8 中的④,电机转轴就在(3)基础上旋转一个角度,达到另外一 个位置;
- 在(4)的基础上,我们修改接线方式,为 A 接 GND、B 接 24V、C 悬空,此时对应图 10-8 中的⑤,电机转轴就在(4)基础上旋转一个角度,达到另 外一个位置;
- 在(5)的基础上,我们修改接线方式,为 A 悬空、B 接 24V、C 接 GND,此时对应图 10-8 中的⑥,电机转轴就在(6)基础上旋转一个角度,达到另外一 个位置。
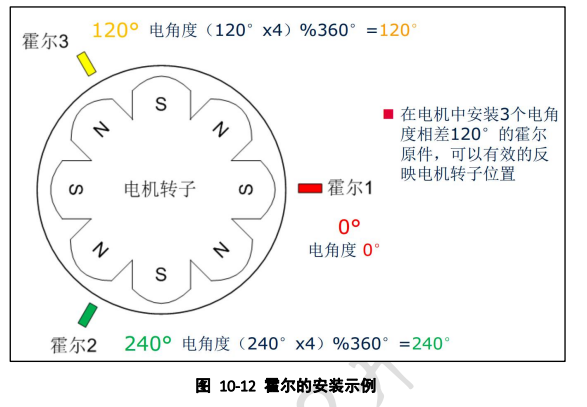
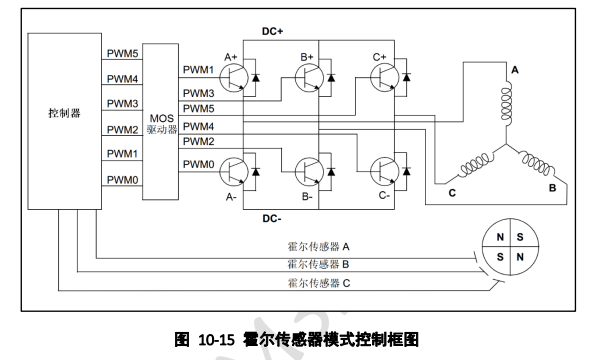
1.3 有感霍尔传感器驱动方式
其中三个霍尔传感器位置如图:
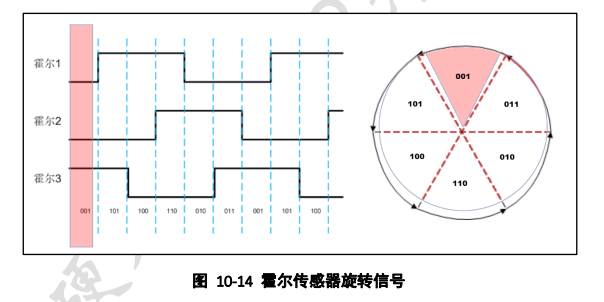
其中三个霍尔的信号与旋转位置关系如下

1.4 烧毁的风险
如果我不管霍尔信号变化,就按中任一种其中给电, 电机会怎样的呢?电机会固定在一个位置,实际上,这种情况是很危险的,我们 知道,绕组都是漆包线铜丝,电阻非常小,当总是给电时候,电路中电流就非常大,严重情况,烧毁电机或者电源。
如果直接导通 A+和 A-这两桥臂,或者 B+和 B-这两桥臂,或者 C+和 C-这两桥臂会出现什么情况呢?结果就是电源必烧无疑,这些情况相当于电源正负极直接短路,所以这要求我们在接线或者电路设计是非常小心!!!
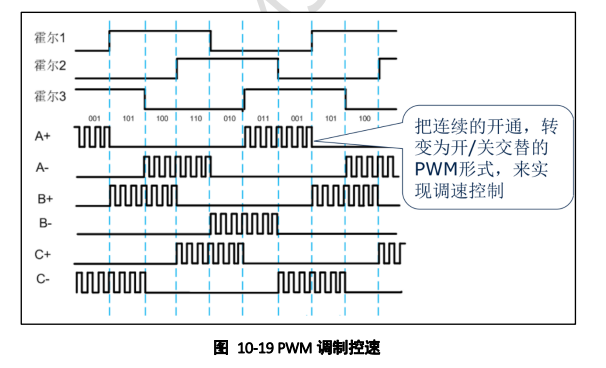
1.5 BLDC 方波速度控制
如果控制它的速度,类似之前讲过的直流减速电机控速方法,BLDC 电机控速也是用到脉冲宽度调制技术。
使用PWM控制直流无刷电机的策略包括PWM-ON、ON-PWM、H_PWM-L_ON、H_ON-L_PWM和H_PWM-L_PWM。 这 5 种控制策略,均是电机处于 120° 运行方式下进行的。如下图所示。
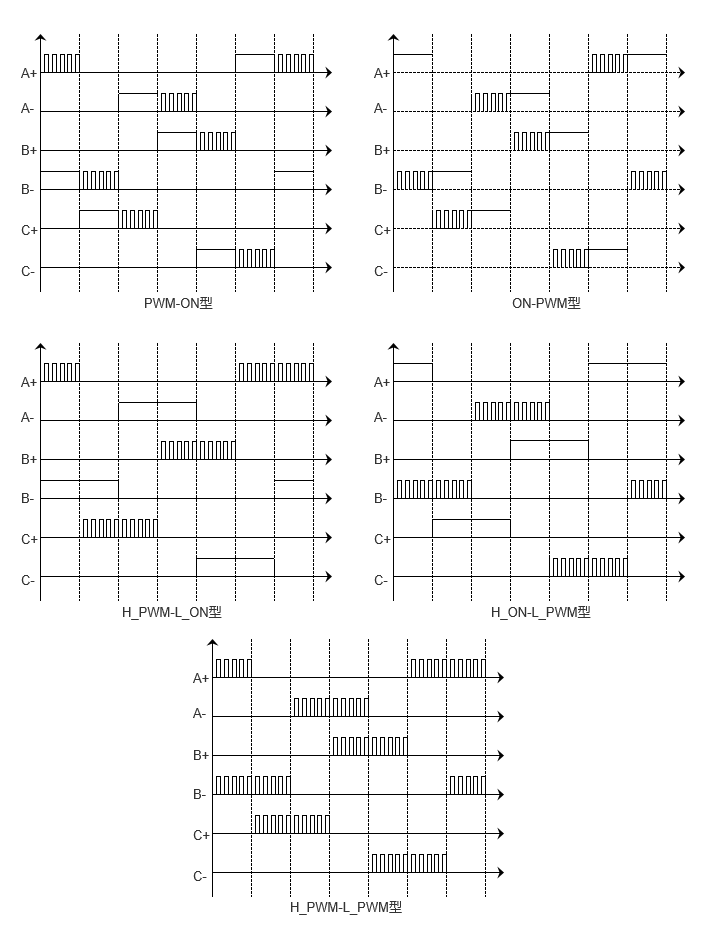
这5种调制方式为:
-
PWM-ON型:在120°导通区间,各开关管前60°采用PWM调制,后60°则恒通。
-
ON-PWM型:在120°导通区间,各开关管前60°恒通,后60°则采用PWM调制。
-
H_PWM-L_ON型:在120°导通区间,上桥臂开关管采用PWM调制,下桥臂恒通。
-
H_ON-L_PWM型:在120°导通区间,上桥臂开关管恒通,下桥臂采用PWM调制。
-
H_PWM-L_PWM型:在120°导通区间,上、下桥臂均采用PWM调制。
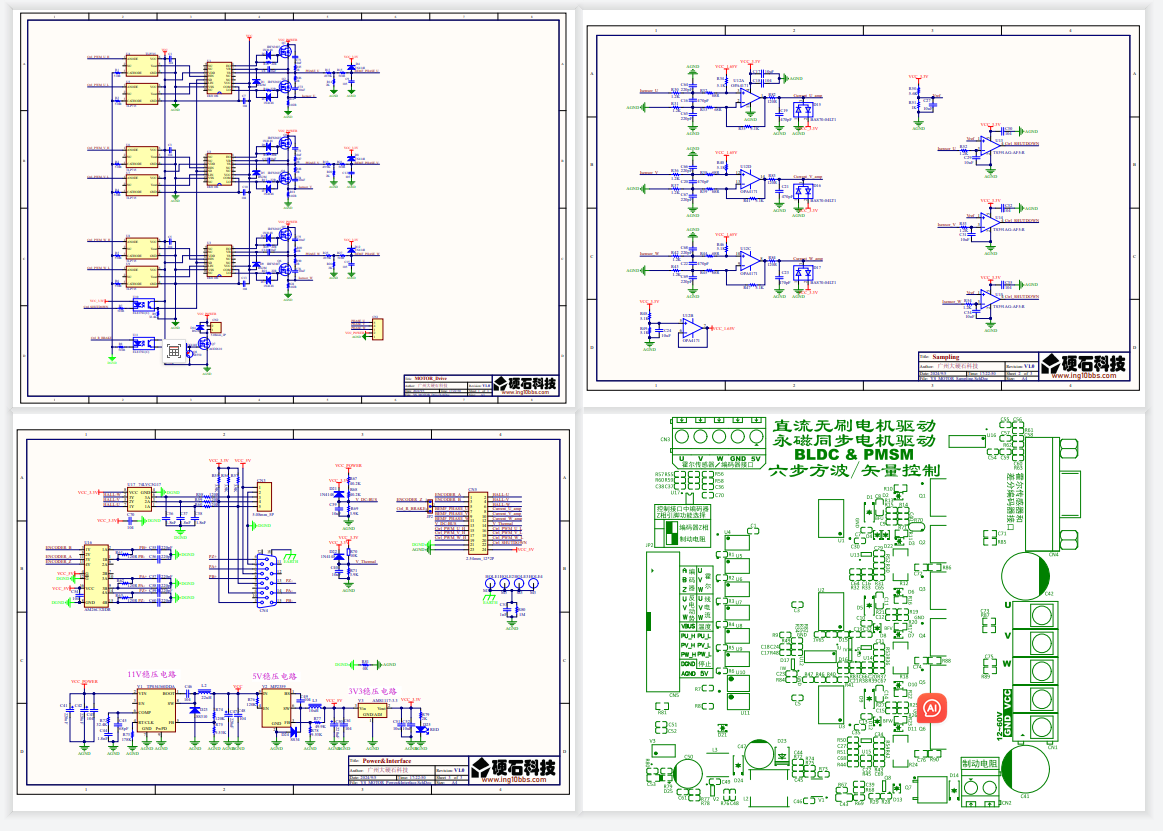
二、硬件设计
原理图一览
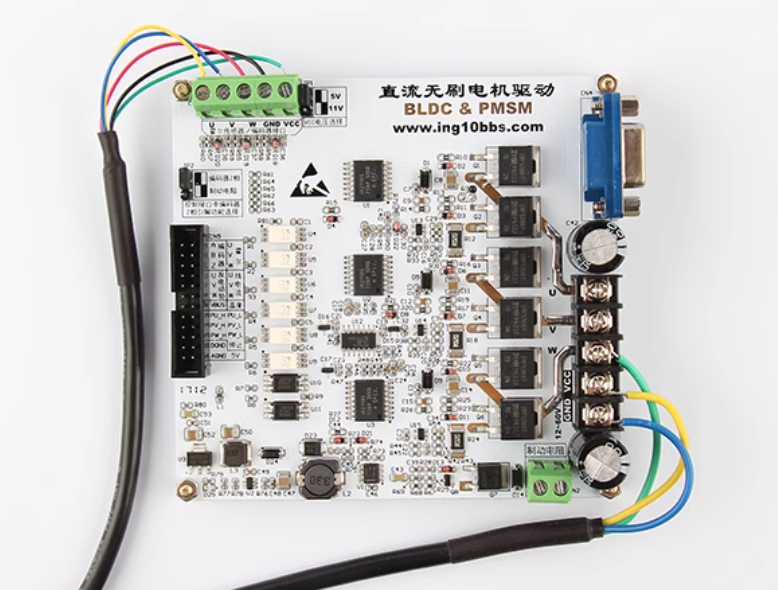
设备外观
2.1 MOS驱动电路
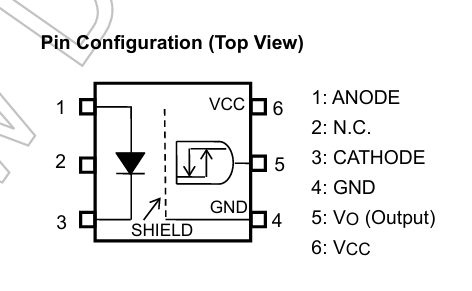
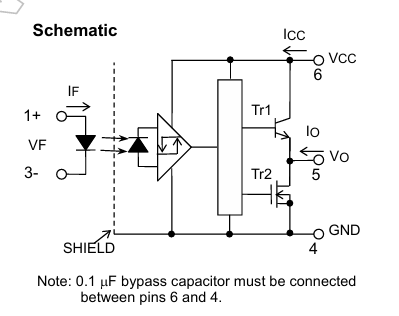
2.1.1 TLP715 光耦隔离芯片
pwm输出端前置光耦隔离,避免高压击穿单片机,原理大致如下。
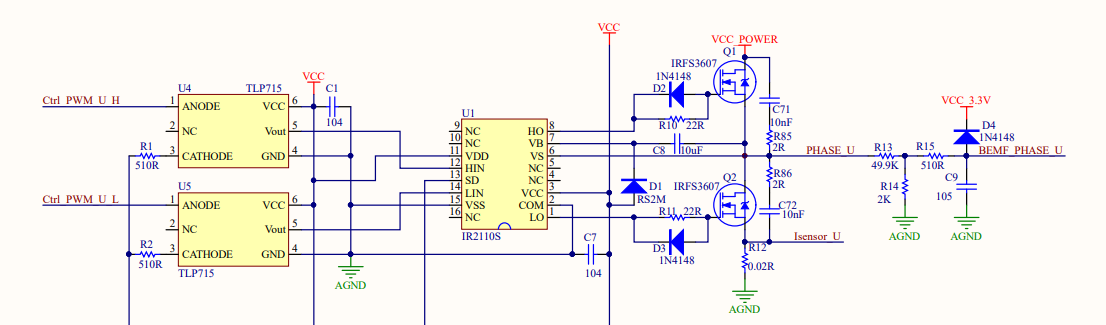
2.1.2 IR2110S mos管驱动
六个桥臂的驱动,我们驱动板选择的 MOS 管型号是:IRFS3607。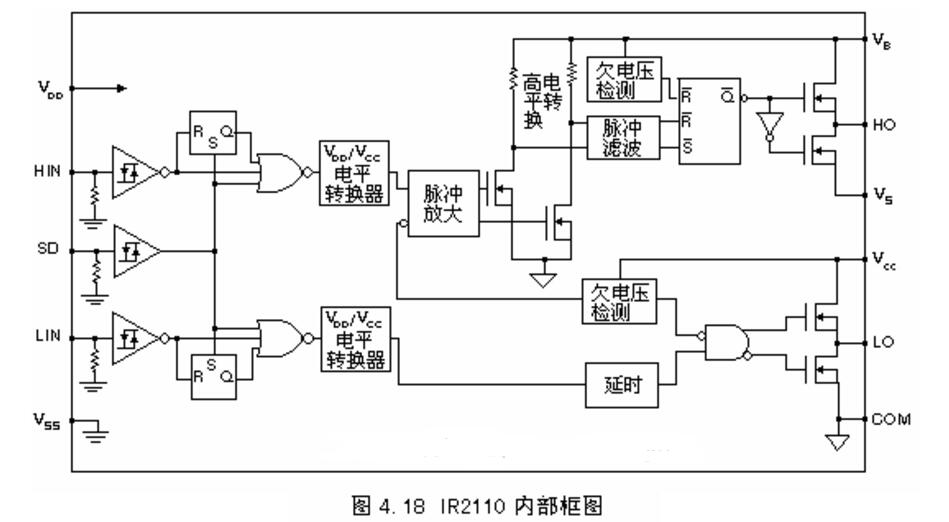
| LO(引脚1) | 低端输出 |
| COM(引脚2) | 公共端 |
| Vcc(引脚3) | 低端固定电源电压 |
| Nc(引脚4) | 空端 |
| Vs(引脚5) | 高端浮置电源偏移电压 |
| VB(引脚6) | 高端浮置电源电压 |
| HO(引脚7) | 高端输出 |
| Nc(引脚8) | 空端 |
| VDD(引脚9) | 逻辑电源电压 |
| HIN(引脚10) | 逻辑高端输入 |
| SD(引脚11) | 关断 |
| LIN(引脚12) | 逻辑低端输入 |
| Vss(引脚13) | 逻辑电路地电位端,其值可以为0V |
| Nc(引脚14) | 空端 |
IRFS3607 的 VGS(th)是4V(最大值)。我们为 IR2110S 设计的电源电压为 11V(VCC),IR2110S 的 低端驱动,即驱动 Q6 的 IRFS3607,很容易就实现 NMOS 管驱动条件。
对于 D2 和 D3 均是配合 R10 和 R11 快速卸掉能量,提高MOS驱动速度的。
C8 电容则是自举电路,为VB端提供超过 VCC_PROWER 的电压,提高驱动MOS的能力,因为 NMOS 管的导通基本条件就是 VGS 大于一定的阈值电压 VGS(th)。
自举电路就是升压电路,简单来说在该电路中, 自举电路的作用是使得 IR2110S 高端驱动,即 IR2110S 的第 8 引脚 HO 输出信号 可以满足大于 VGS(th) 。

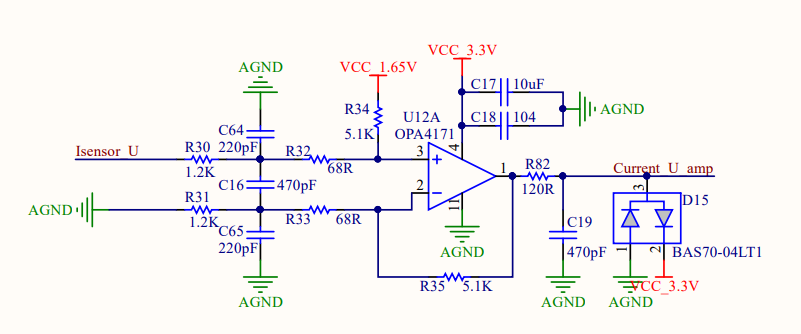
2.1.3 opa4171 采集电流电路
一个4.02放大倍数的运放,供无感采集使用。其中 R32 上携带了 1.65V 的偏置电压。C16电容供滤波使用等。
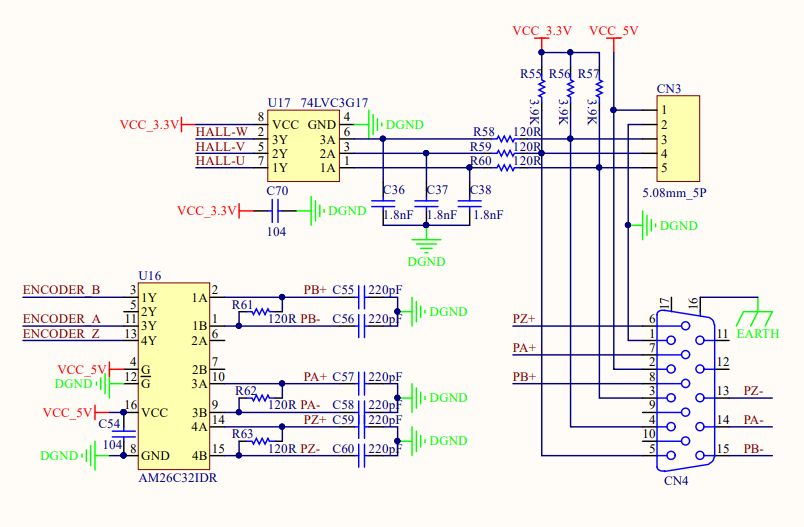
2.2 霍尔传感器接口电路
霍尔传感器接口电路就简单很多,这只做一些简单的上拉和滤波处理,很多情况下上拉电阻是必须的,这个一般电机厂家有特别的说明。为合适 STM32 开发板电平要求,采用 3.3V 的上拉。
其中霍尔信号经过 74LVC3G17 提供三个带施密特触发器输入的非反相缓冲器。该器件能够将缓慢变化的输入信号转换成清晰无抖动的输出信号。
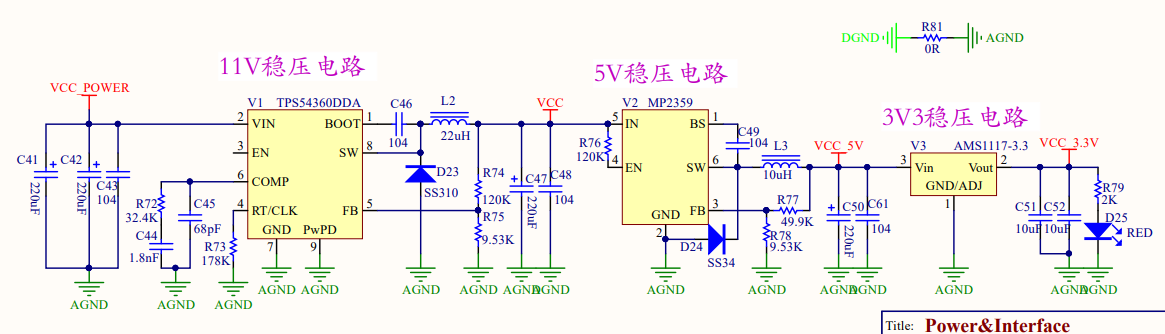
2.3 电压转化电路
这里用到 11V 和 5V 电源,我们这里有 3.3V 电源。11V 电源使用 DC-DC 芯片 TPS54360 得到,该芯片最大输入电压为 60V, 最大电流为 3.5A,这样使得我们驱动板可以兼容 12V、24V、36V、48V 和 60V 的 电机驱动,大大增加驱动板的应用范围。5V 电源由 LM2359 芯片得到,3.3V 使 用 AMS1117-3.3 得到。


















 1116
1116

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









