






使用MATLAB和Simulink的自动驾驶汽车建模acc cacc自适应巡航协同
YID:2830672685982202
一無所有`
MATLAB与Simulink:自动驾驶汽车的ACC与CACC自适应巡航协同建模实践
摘要:
本文将通过MATLAB和Simulink,详细介绍自动驾驶汽车的自适应巡航(ACC)及协同自适应巡航(CACC)的建模过程。我们将从设计、模型构建、仿真实验等方面展开讨论,以期为自动驾驶技术的研究与应用提供有价值的参考。
一、引言
随着人工智能和物联网技术的飞速发展,自动驾驶汽车逐渐成为汽车产业的重要研究方向。其中,自适应巡航(ACC)和协同自适应巡航(CACC)作为自动驾驶的关键技术,对于提升道路交通安全、减少交通拥堵具有重要意义。本文将通过MATLAB和Simulink,展示这两种技术的建模过程。
二、设计
- 自适应巡航(ACC)设计
自适应巡航是一种智能化的车辆控制,能够根据前方车辆的距离和相对速度自动调整本车速度,保持安全距离。在MATLAB中,我们可以使用控制算法对车辆速度进行实时调整,以实现自适应巡航。
- 协同自适应巡航(CACC)设计
协同自适应巡航则是在自适应巡航的基础上,通过车联网技术实现车辆之间的信息共享和协同控制。在Simulink中,我们可以构建一个包含多辆车的网络化,通过信息交流和协同控制实现整体效率的提升。
三、模型构建
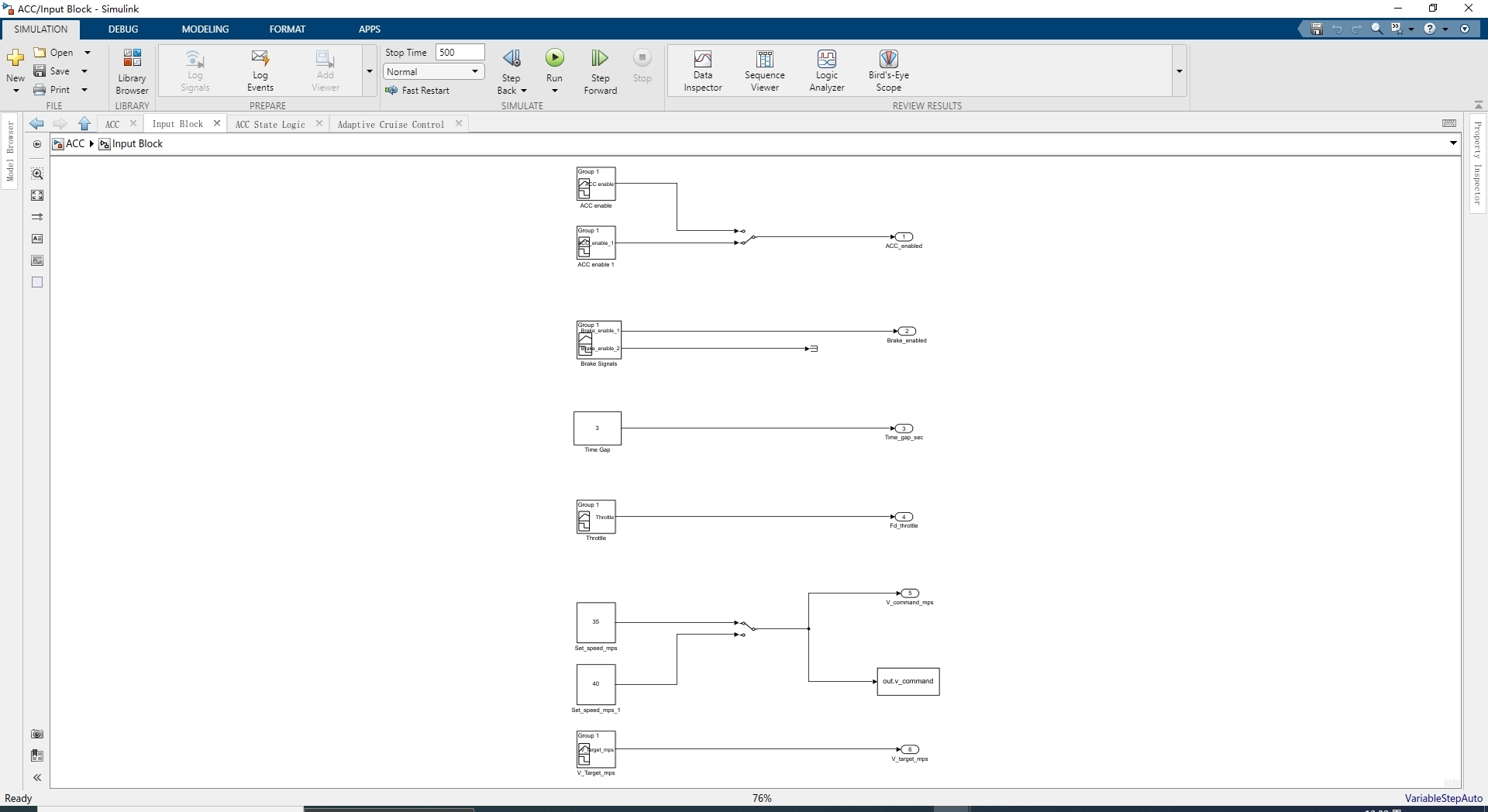
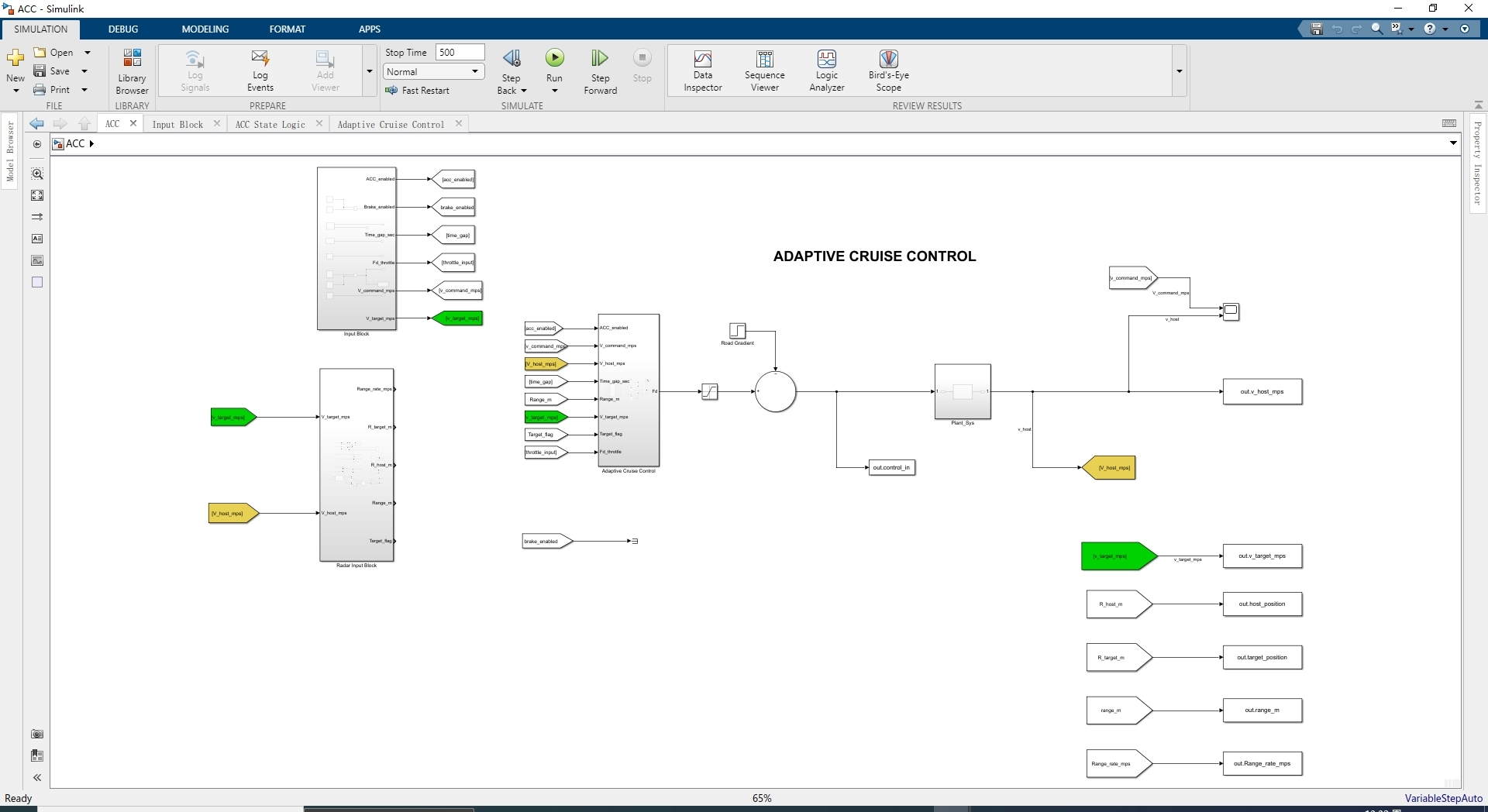
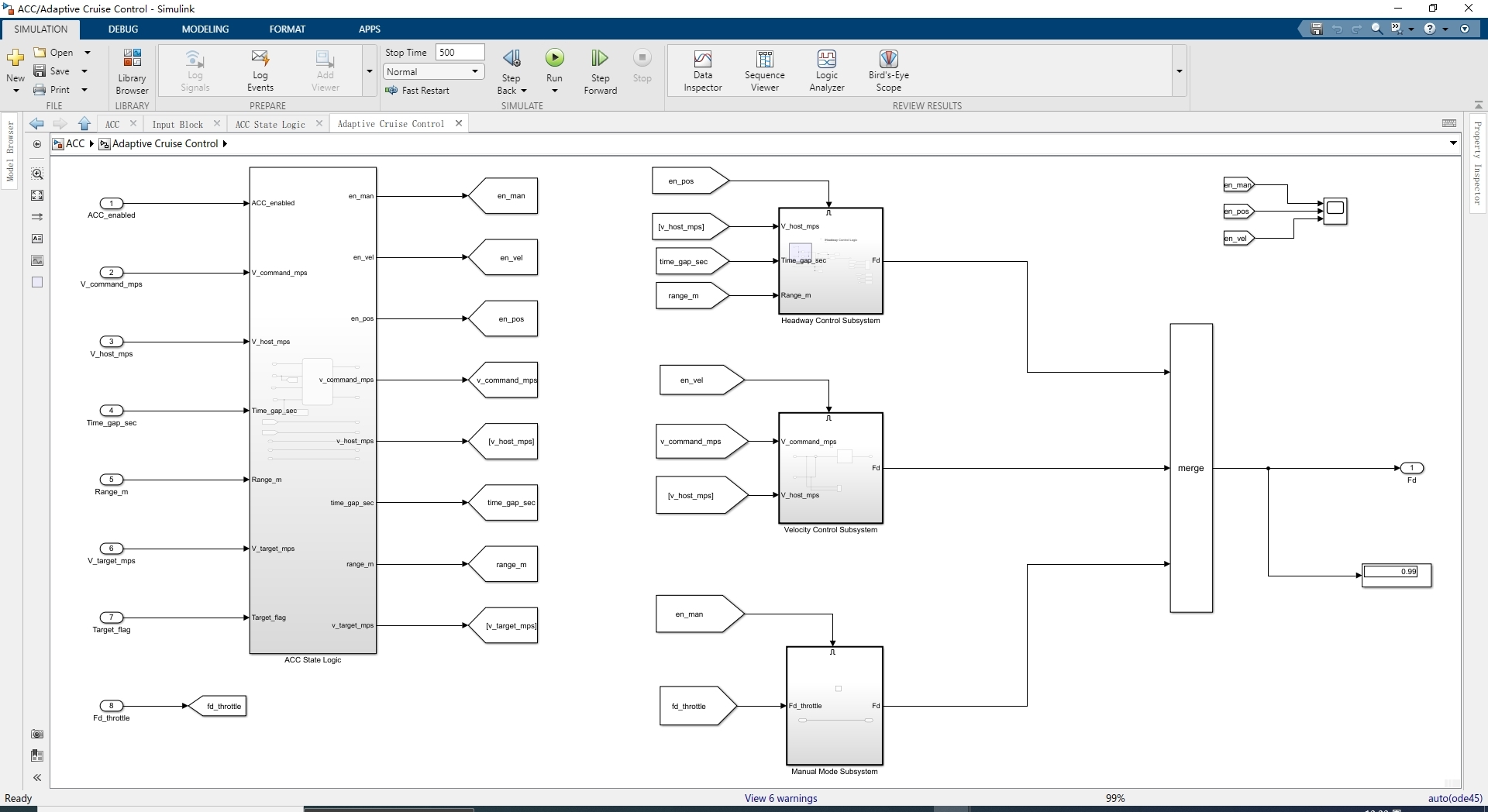
在MATLAB中,我们可以使用Simulink模块构建自动驾驶汽车的模型。首先,需要建立车辆的动态模型,包括车辆的行驶状态、控制输入等。然后,根据自适应巡航和协同自适应巡航的需求,构建相应的控制算法模型。这些模型包括传感器数据采集、控制策略制定、执行器输出等部分。
四、仿真实验
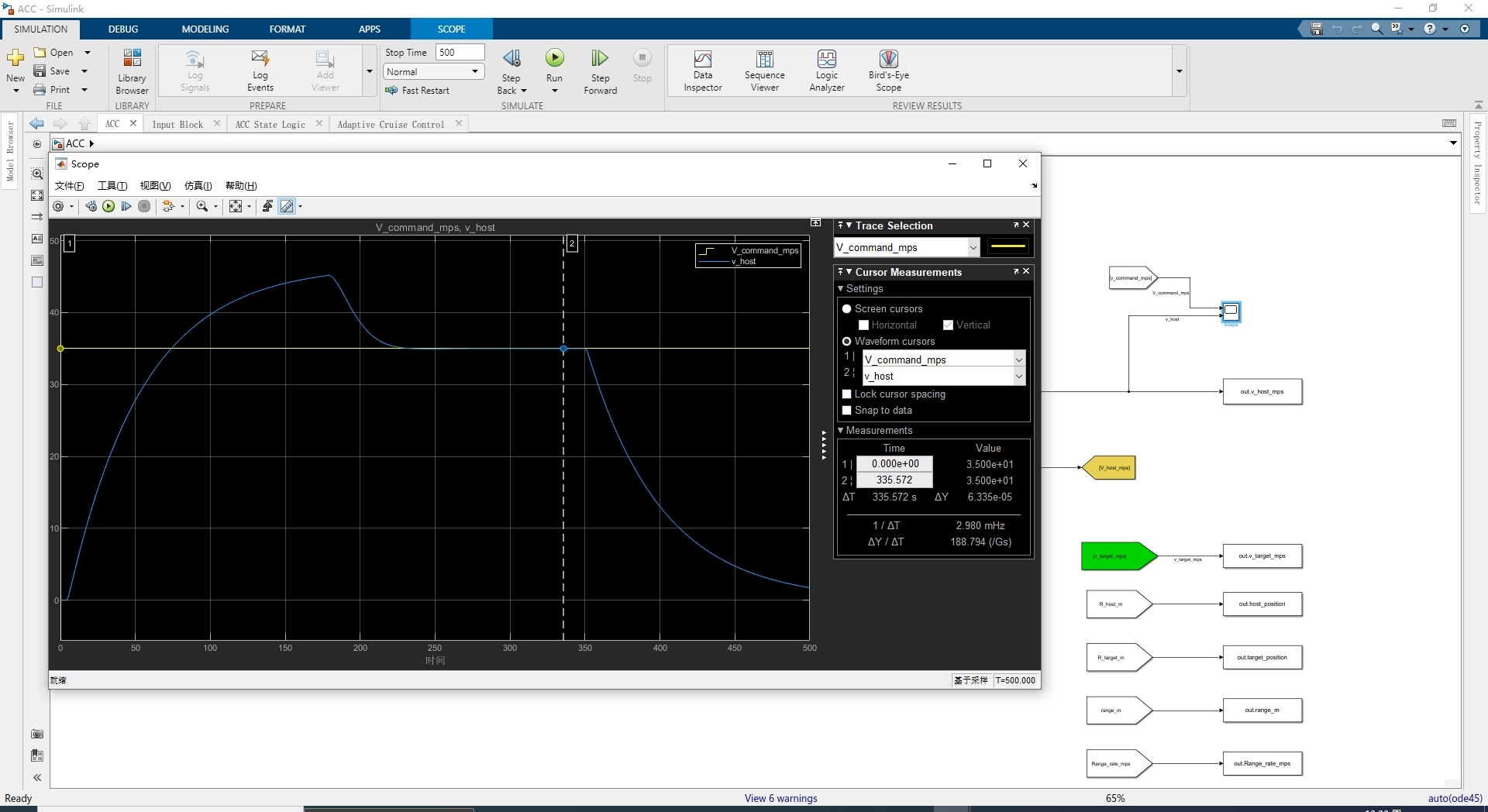
在Simulink中,我们可以进行仿真实验以验证模型的正确性和性能。通过设置不同的道路场景、交通状况和车辆状态,我们可以观察和分析车辆在不同情况下的行驶表现。同时,我们还可以通过调整控制算法的参数,优化车辆的行驶性能。
五、示例代码与实现
以下是使用MATLAB和Simulink进行自动驾驶汽车建模的示例代码片段:
% 定义车辆动态模型参数
vehicle_params = ...; % 包含车辆质量、阻尼系数等参数的结构体
% 创建车辆动态模型模块
vehicle_model = Simulink.createModel('VehicleDynamicModel', vehicle_params);
% 定义自适应巡航控制算法逻辑
acc_controller = ...; % 包含控制逻辑的函数或脚本
% 在Simulink中构建完整的自动驾驶汽车模型
% 包括传感器模块、控制算法模块等...
六、结论与展望
本文通过MATLAB和Simulink,详细介绍了自动驾驶汽车的自适应巡航和协同自适应巡航的建模过程。通过设计、模型构建和仿真实验等步骤,我们能够更好地理解和分析自动驾驶技术的性能和潜力。未来,随着技术的不断进步和应用场景的拓展,自动驾驶汽车将在道路交通安全、交通效率等方面发挥更加重要的作用。
七、结束语(或随笔)
在这个快速发展的时代,自动驾驶技术正逐渐改变我们的生活方式。通过使用MATLAB和Simulink等工具,我们可以更加深入地研究和实践这一领域的技术创新。希望本文能够为相关研究者和开发者提供一些有价值的参考和启示。让我们共同期待自动驾驶技术的美好未来!
后有深度解读: https://pan.baidu.com/s/1VnkMOVJIKq-xwb35V63XUA?pwd=r3rf
















 1841
1841

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









