






OAKChina & 苏州泛科特机器人联合推出
OAK-D Series & 因子空间感知(Factor Perception Kit)VSLAM解决方案
01 Factor Perception Kit简介
Factor Perception Kit是一种真正基于深度学习技术的 VSLAM 方案,不同于许多厂商仅通过添加目标检测或语义分割模型来实现额外功能,我们直接在 SLAM 底层使用 HF-Net 模型,该模型同时进行局部特征点检测与描述以及全局描述(即图像嵌入技术)。模型输出的数据服务于 SLAM 的前端和后端,从而实现基于深度学习的特征点检测与追踪,前端的 VIO 可以更精准地工作,后端则利用全局描述进行视觉地点识别(VPR),即使在超大场景中也能实现快速回环检测和重定位问题
Factor Perception Kit 软件架构
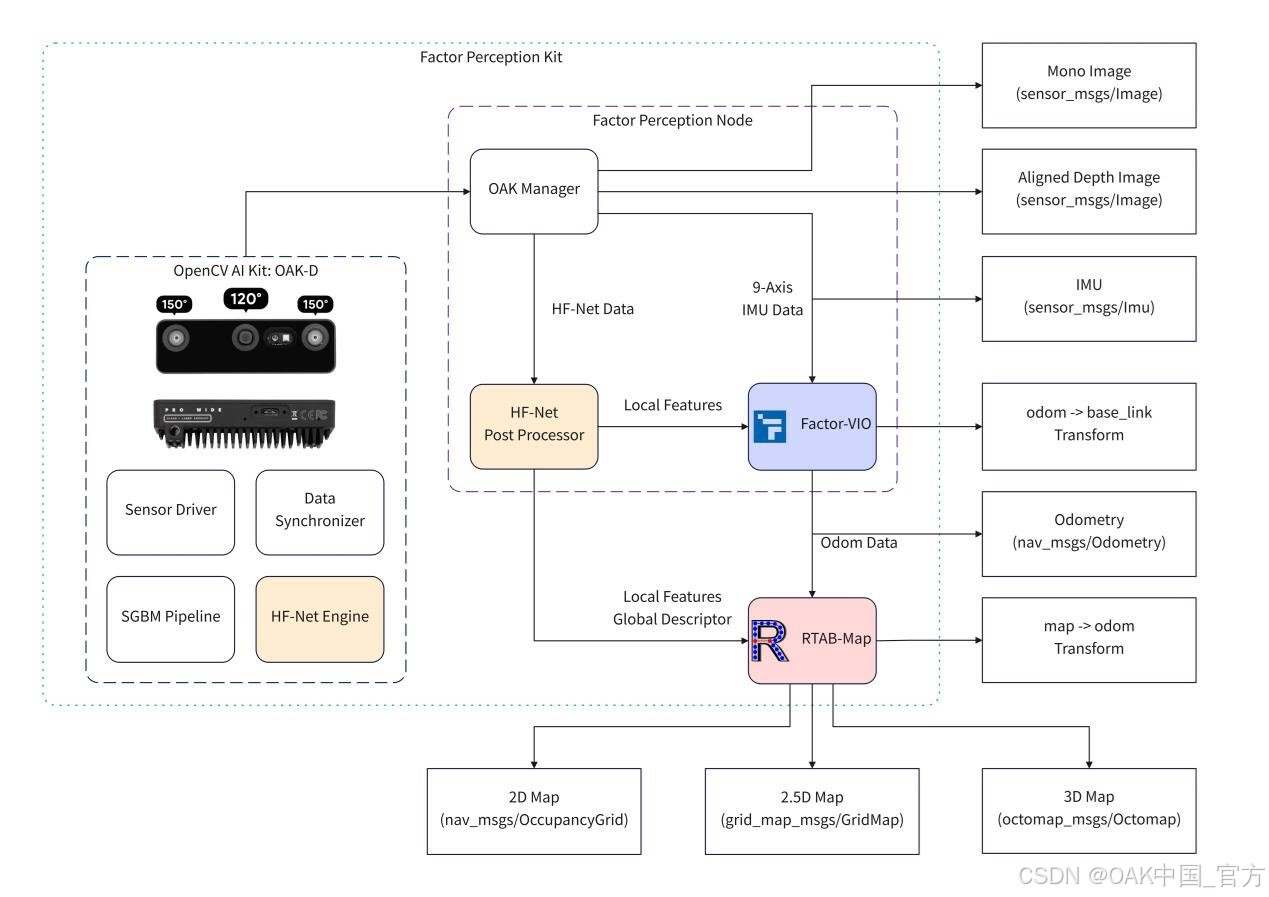
Factor Perception Kit硬件适配OAK-D系列相机,软件包含Factor Perception SDK 及License
OAK-D系列相机输出20 FPS的图像数据及200 Hz的9轴IMU数据。相机内置神经网络加速芯片,可让HF-Net达到20 Hz的推理性能。
Factor-VIO使用HF-Net输出的局部特征与9轴IMU数据,实现高精度和高鲁棒性的视觉惯导里程计。系统还能够生成不同维度的地图,包括2D Map、2.5D Map和3D Map,以适应不同的应用需求。此外,系统还涉及多种坐标转换,以确保数据的一致性和准确性。
02 Factor Perception Kit功能性能
功能详解:
Factor Perception Kit是一套基于深度学习的VIO和SLAM功能套件,适用于室内、室外、城市、野外,还是夜间或完全黑暗环境,均能稳定避障、定位和建图。
定位:根据传感器安装位置配置,自动输出机器人本体坐标系的6自由度位姿和速度,简化集成过程。
建图:提供2D、2.5D、3D地图,满足不同导航和避障需求,如AGV/AMR的2D地图,无人机的3D地图,以及人形机器人和机器狗的2.5D地图。
集成:遵循ROS规范,与GMapping、Cartographer等开源SLAM框架兼容,使用AMCL框架的客户可轻松切换至Factor Perception Kit。
前端闭源后端开源:前端与OAK相机深度整合,后端RTAB-Map开源,提供灵活性,用户可根据自己的应用需求进行定制。
性能详解:
毫米级别定位精度:利用深度学习技术,实现快速准确的回环检测和重定位,短期内精度可达毫米级。
厘米级建图精度:系统精度基本在厘米以内,通过多次建图优化和在线建图后离线优化可进一步提升到毫米级别精度。
高帧率定位数据:提供200Hz的高帧率输出,涵盖机器人本体坐标系的位置、姿态、线速度、角速度及其协方差,满足高速自动驾驶、AR/VR等应用需求。
高鲁棒性:基于深度学习的VIO方案具有天然高鲁棒性,能容忍短10秒内剧烈晃动和相机完全遮挡,对动态目标影响小。
无限制建图范围:硬盘空间足够,即可构建任意大小的地图,后端内存管理技术支持超大场景。
地图缩减技术:在大场景测试中,通过地图缩减技术,确保系统性能不受影响。
03 Factor Perception Kit 产品优势
简单易用
仅需OAK相机与Ubuntu/ROS主控,USB或PoE连接,一键安装,无需繁琐配置,享受即插即用的便捷。
快速上手
无需相机标定,直接解析出厂数据,实现多相机无缝切换,简化VSLAM部署。
无缝集成
遵循ROS规范,与GMapping、Cartographer等框架无缝对接,轻松切换,降低开发成本。
智能转换
自动处理坐标转换,支持动态相机安装,如机械臂,提供灵活的位姿和速度输出。
精准可靠
厘米级精度,适应多种环境,包括全黑条件,展现卓越鲁棒性。
广泛适用
无限制建图范围,支持室内外、城市、野外等场景,满足多样化需求。
丰富数据
提供200Hz高帧率定位数据,多种地图类型,避障数据,支持离线三维重建。
高级特性
隐私保护模式,Life-Long SLAM与分布式SLAM,单机多开,前端闭源后端开源,灵活配置,满足个性化需求。
购买渠道
即日起登录OAKChina 主页产品栏,即可点击对应链接跳转至官方店铺购买



















 5277
5277

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









