







一、配置过程
1、配置RCC、SYS、USART1、时钟84MHz
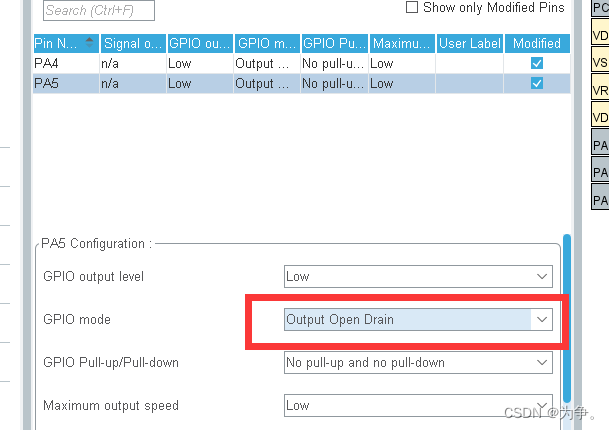
2、配置PA4、PA5为开漏输出模式
3、生成代码
二、代码移植
1、移植加入逐飞iic与mpu6050库
2、在main.h中添加宏定义
#define MPU6050_SCL_Pin GPIO_PIN_4
#define MPU6050_SCL_GPIO_Port GPIOA
#define MPU6050_SDA_Pin GPIO_PIN_5
#define MPU6050_SDA_GPIO_Port GPIOA3、在main.c中添加
#include "SEEKFREE_MPU6050.h"
mpu6050_init();
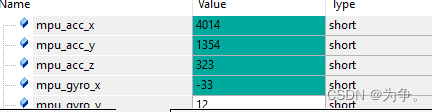
get_accdata(); //获取陀螺仪数据
get_gyro(); //获取加速度计数据3、debug















 6248
6248











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









