







Guo, Y., Wang, H., Hu, Q., Liu, H., Liu, L., & Bennamoun, M. (2021). Deep Learning for 3D Point Clouds: A Survey. IEEE Transactions on Pattern Analysis and Machine Intelligence, 43(12), 4338–4364. https://doi.org/10.1109/TPAMI.2020.3005434
摘要:
点云学习近年来受到越来越多关注,因其在计算机视觉、自动驾驶和机器人等多个领域的广泛应用。作为人工智能中的主导技术,深度学习已成功应用于解决各种二维视觉问题。然而,由于深度神经网络处理点云面临的独特挑战,点云上的深度学习仍处于起步阶段。近期,点云上的深度学习甚至呈现蓬勃发展的趋势,涌现出许多方法来解决该领域中的不同问题。为了激发未来的研究,本文全面回顾了点云深度学习方法的最新进展。它涵盖了三个主要任务,包括3D形状分类、3D物体检测和跟踪,以及3D点云分割。文章还在几个公开可用的数据集上呈现了比较结果,同时提供了深刻的观察和启发性的未来研究方向。
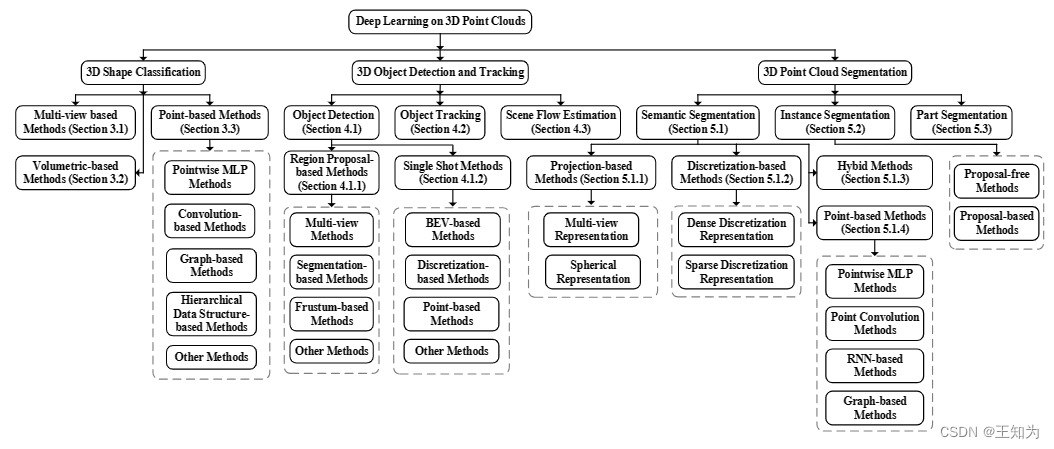
图1 3D点云深度学习方法的分类体系
表1 数据集
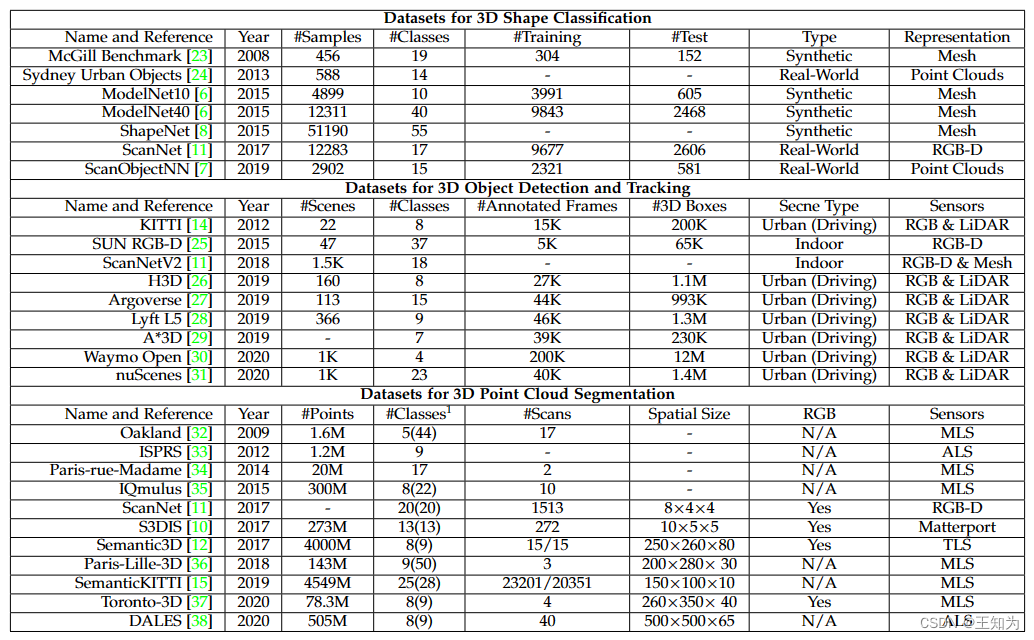
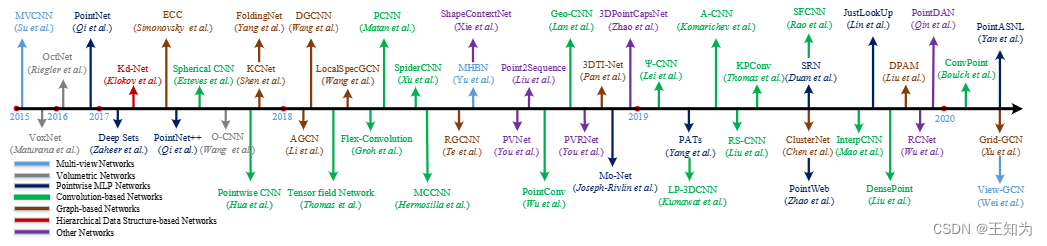
图2 基于深度学习的3D形状分类方法的时序概述
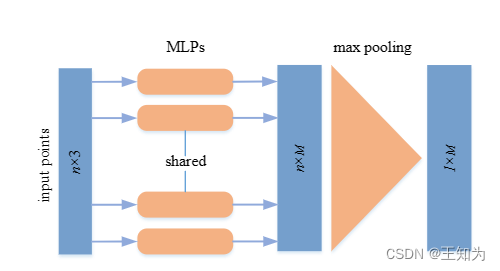
图3 PointNet的轻量级架构。其中,n表示输入点的数量,M表示每个点学到的特征的维度。
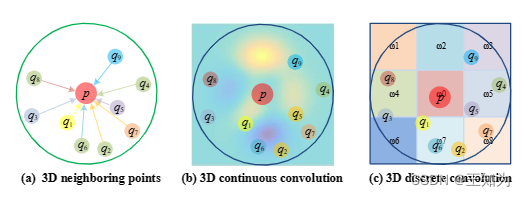
图4 对点的局部邻域进行连续和离散卷积的示意图。 (a) 表示以点p为中心的局部邻域qi; (b) 和 © 分别表示3D连续和离散卷积。
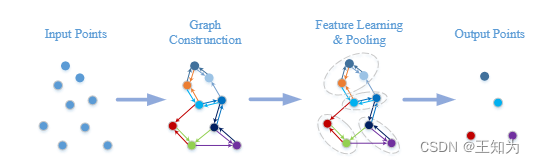
图5 基于图的网络的示意图。
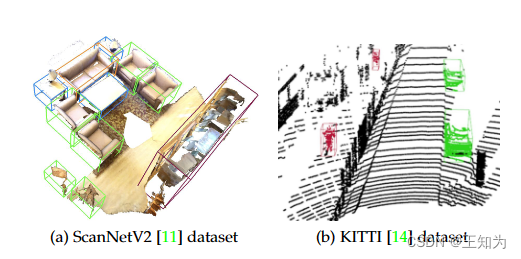 图6 3D物体检测的示意图。其中,(a) 和 (b) 分别源自 [124] 和 [125]。
图6 3D物体检测的示意图。其中,(a) 和 (b) 分别源自 [124] 和 [125]。
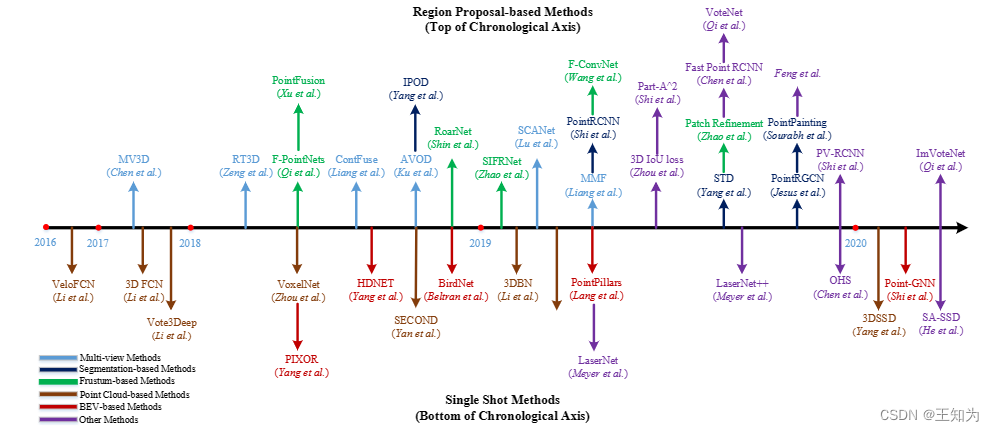
图7 基于深度学习的3D物体检测方法的时序概述。
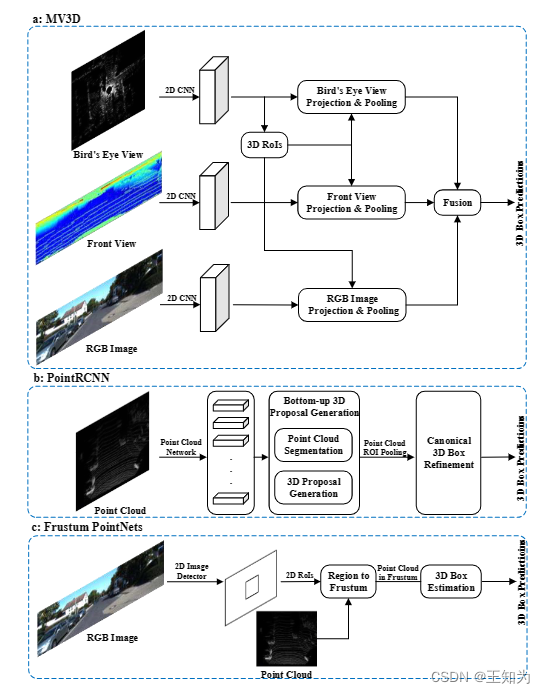
图8 三类基于区域提议的3D物体检测方法的典型网络。从上到下分别是:(a) 基于多视图的方法,(b) 基于分割的方法,以及 © 基于截锥体的方法。
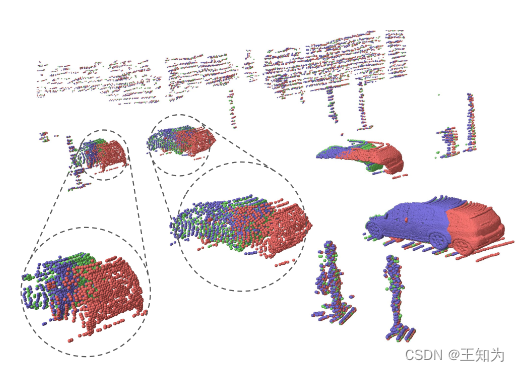
图9 两个KITTI点云之间的3D场景流,最初在[175]中展示。点云X、Y和X的平移点云分别用红色、绿色和蓝色突出显示。
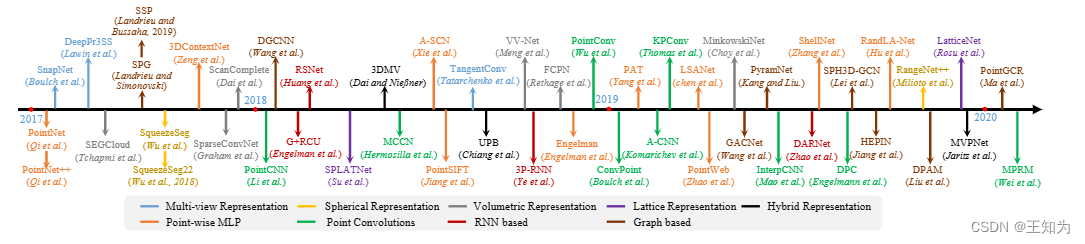
图10 基于深度学习的3D语义分割方法的时序概述。
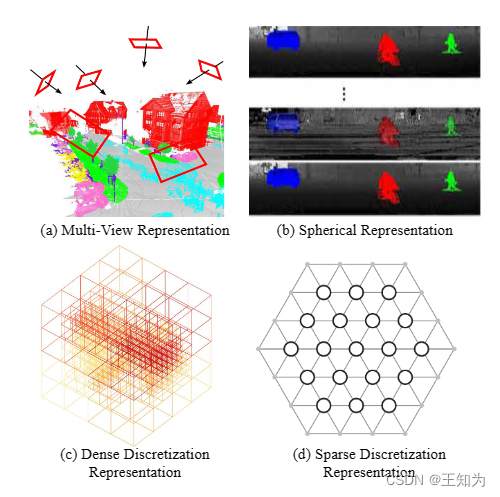
图11 中间表示的示意图。其中,(a) 和 (b) 分别源自 [182] 和 [183]。
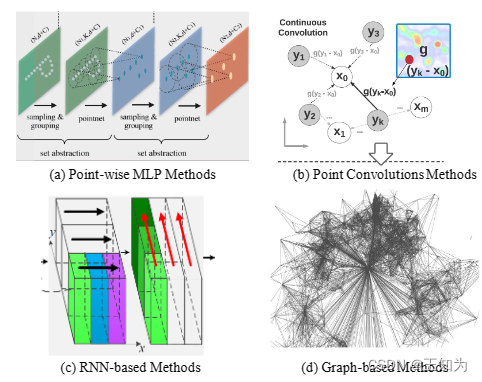
图12:基于点的方法的示意图。其中,(a)-(d) 分别源自[54]、[201]、[202]、[203]。
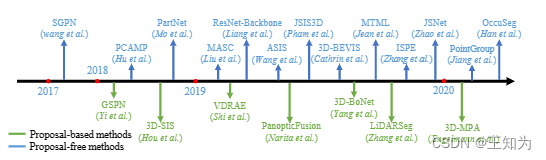
图13:基于深度学习的3D实例分割方法的时序概述。
















 1573
1573











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











