







 本文作为计算机视觉学习笔记的第八部分,详细介绍了如何利用双目视觉技术进行三维坐标重构。通过假设左右图像点完美匹配,利用opencv的cvCalibrateCamera2()函数获取的焦距,结合像素物理尺寸和视差,应用几何原理进行三维坐标恢复。最终通过反投影矩阵实现透视投影的逆过程。此系列旨在帮助计算机视觉初学者理解双目视觉几何框架。
本文作为计算机视觉学习笔记的第八部分,详细介绍了如何利用双目视觉技术进行三维坐标重构。通过假设左右图像点完美匹配,利用opencv的cvCalibrateCamera2()函数获取的焦距,结合像素物理尺寸和视差,应用几何原理进行三维坐标恢复。最终通过反投影矩阵实现透视投影的逆过程。此系列旨在帮助计算机视觉初学者理解双目视觉几何框架。
八、走向三维
我们前面花了七篇博文做铺垫,我们所做的一切努力都是为了最后的这一击——立体成像。因为玉米的这个系列文章是对双目视觉几何框架的总结。此处跳过匹配,假设左右图像点的完美匹配的。只看在几何上,三维坐标是如何被还原的。相对来说,最后的这一步,比前面是要轻松许多的,因为我们前面已经做了大量的工作。这些工作使得最后的这一步,由不可能称为可能,由复杂变得简单,吧啦吧啦。好吧,闲话少说,让我们一起来见证这一时刻吧。
此处我们按opencv中cvcalibratecamera2()函数得到的焦距f进行三维坐标的求解。
请大家看下面示意图(莫怪,玉米的图一向画的丑):
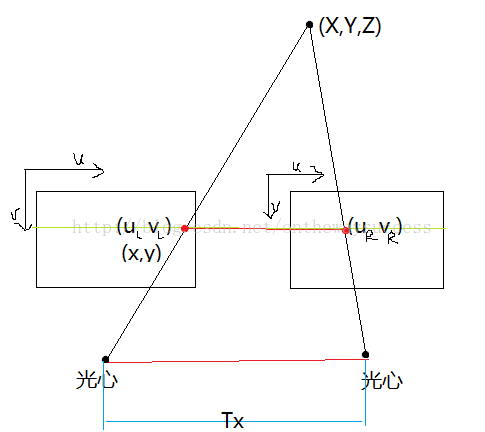
根据最简单的相似三角形关系,我们就可以求出,物点坐标(X,Y,Z)。
首先,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 573
573

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









