







【本学期选修国科大计算机视觉课程,本人方向也是cv,因此想通过博客方式记录课程中比较重要的点,巩固并且进行一些扩展学习】
【从本章节开始由申抒含老师为我们讲述相关知识】
【本章节内容针对相机模型和多视几何进行讲解】
接下来我们将主要针对以下内容进行介绍:
小孔相机成像模型
基本矩阵F,如8点法等
一. 计算机视觉发展历史
从Marr最开始的图像处理到Hinton提出深度学习,甚至延续到现在,也就40年的时间,也就意味着计算机视觉此时只是处于一种前期发展,更需要人们去投入心思发现其奇妙之处。
特征提取是针对点线面进行分析,提取所需特征值。
2.5维深度图是指可见区域,如一堆方块放置在一边,你只能看到正面对着的那一块。
子空间学习大意是指通过投影,实现高维特征向低维空间的映射,是一种经典的降维思想。绝大多数的维数约简(降维,投影)算法都算是子空间学习,如PCA、LDA、LPP、LLE等;
在Poggio时期,流行寻找更加好的空间分类器。
深度学习这边就不多加介绍,包括VGG,Imception等,后期有机会会对其模块进行介绍。
 现计算机视觉使用范围很广,同样也意味着我们方向的多样性,但是主要还是针对三维图像的复原,包括三维城市,三维动作捕捉等
现计算机视觉使用范围很广,同样也意味着我们方向的多样性,但是主要还是针对三维图像的复原,包括三维城市,三维动作捕捉等

二. 射影空间
我们这边通过一个图进行学习。
x为投影呈现的二维,X为射影投影之后的,真实呈现的三维模型。


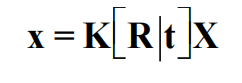
最后我们用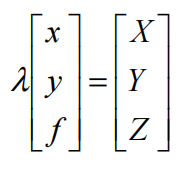 来表示3D空间点和2D图像点
来表示3D空间点和2D图像点
但是问题来了,如果存在一个无限远的点,我们应该如何表示?
• 在一条直线上只有唯一一个无穷远点
• 在一个平面上,所有的无穷远点组成一条直线,称为该平面的无穷远直线

【非齐次到齐次】

【齐次到非齐次】
其中:
三.相机模型


三维计算机视觉坐标系: 1. 世界坐标系、2. 相机坐标系


 相机模型——内参数矩阵
相机模型——内参数矩阵

p是指光轴穿过图像的中心位置!

四. 多视几何
单幅图像的投影方程:
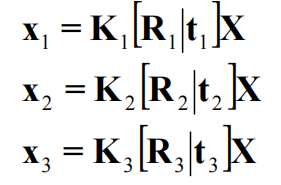
多幅图像的投影方程:

Fundamental matrix(基础矩阵)

图像对应点间的极几何约束关系可以表达为:![]()

八点法,顾名思义就是寻找八个点进行观测。


注意:当空间点位于空间同一平面时,产生退化情况,无法求解
Essential matrix(本质矩阵)

寻找最小配置解的意义:

【推荐书籍】
【本章节没有讲其他特别高深的问题,因为省略了一些数学推导原理,仅作为大致了解内容,不足之处,敬请谅解】















 154
154











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









