







文章目录
本文主要是讲解Apollo项目开发过程中用到的定位坐标,着重讲解GNSS坐标系统及其转化,本文参考 Apollo开发文档和网上 知行合一2018 的博文。
1.全球地理坐标系
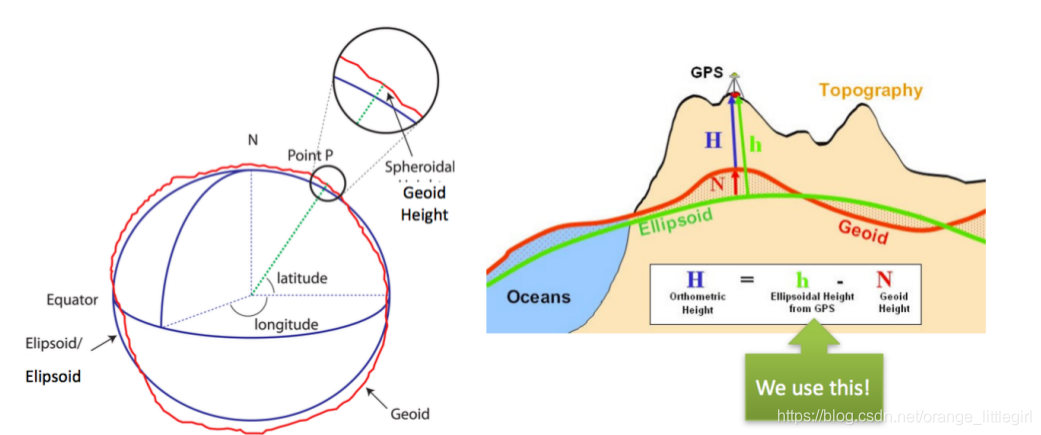
在Apollo项目中,我们使用一个全球地理坐标系统来表示高精地图(HD map)中的元素。全球地理坐标的常用选择
是纬度(latitude)、经度(longitude)和海拔(elevation)。全球地理坐标系普遍采用地理信息系统(Geographic Information System,GIS)中用到的WGS-84(the World Geodetic System dating from 1984)坐标系,世界大地测年系统自1984年起,作为表示经纬度的标准坐标系对象。通过使用这个标准的坐标参考系统,可以唯一地在地球表面标识任何点(除了北极):x坐标和点的y坐标,其中x对应经度,y对应纬度。WGS-84广泛应用于GIS服务中,如测绘、定位、导航等。的定义我们使用的全球地理坐标系如下图所示。海拔值定义为椭球面高度(the ellipsoidal height)。
2.局部坐标系—东-北-天坐标(ENU)
局部坐标系定义为:
- X轴:指向东边
- Y轴:指向北边
- Z轴:指向天顶
如下图所示:
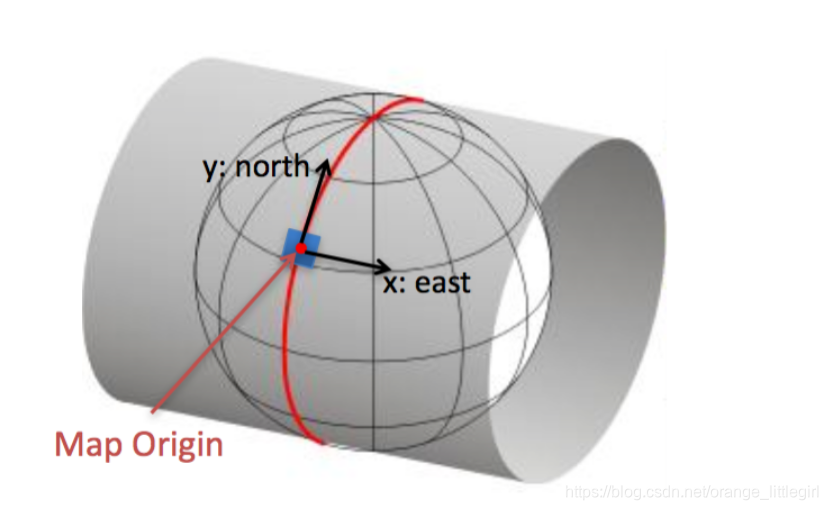
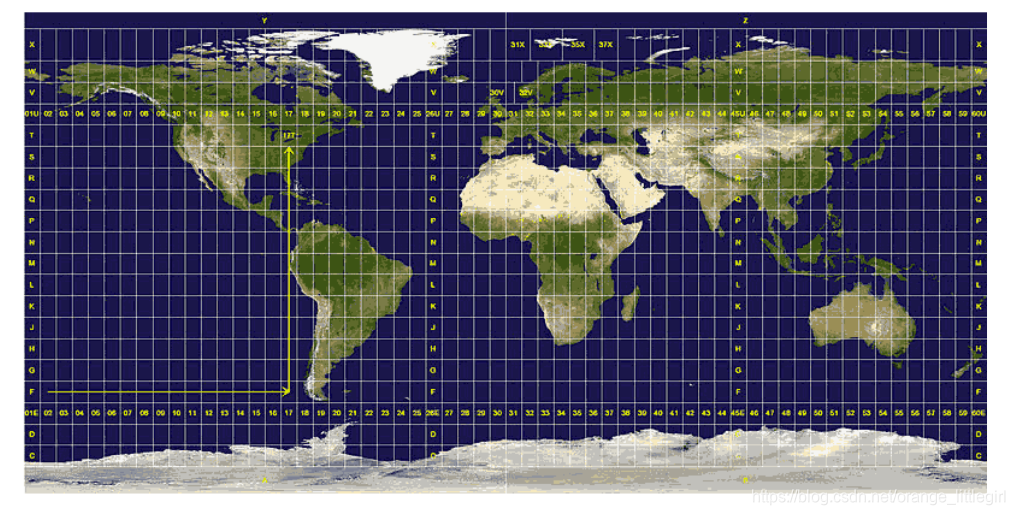
ENU局部坐标系采用三维直角坐标系来描述地球表面,实际应用较为困难,因此一般使用简化后的二维投影坐标系来描述。在众多二维投影坐标系中,统一横轴墨卡托(The Universal Transverse Mercator ,UTM)坐标系是一种应用较为广泛的一种。UTM 坐标系统使用基于网格的方法表示坐标,地球被划分为60个区域,每个区域都是经度为6度的区域,在每一区域内的横切墨卡托投影。阿波罗项目采用UTM坐标系作为模块中的局部框架,如定位、规划等。
参考细节:http://geokov.com/education/utm.aspx
https://en.wikipedia.org/wiki/Universal_Transverse_Mercator_coordinate_system
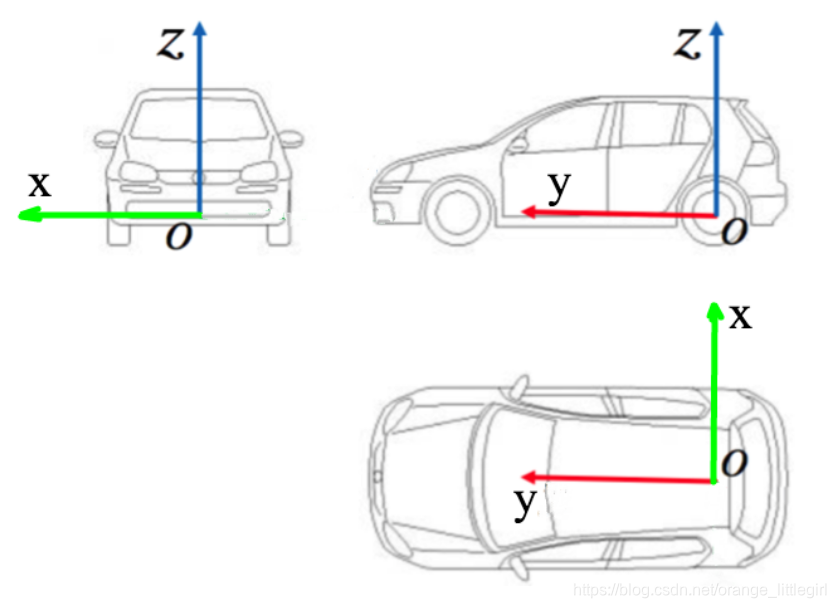
3.车辆坐标系—右-前-天坐标(RFU)
车辆坐标系定义如下:
- X轴:面向车辆前方,右手所指方向
- Y轴:车辆前进方向
- Z轴:与地面垂直,指向车顶方向
注意:车辆参考点为后轴中心。
如下图所示:
4.坐标系转化
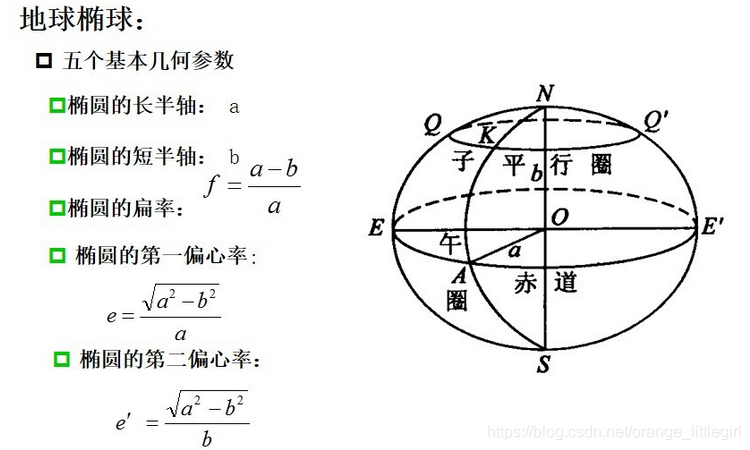
4.1椭球体下的大地坐标系基础
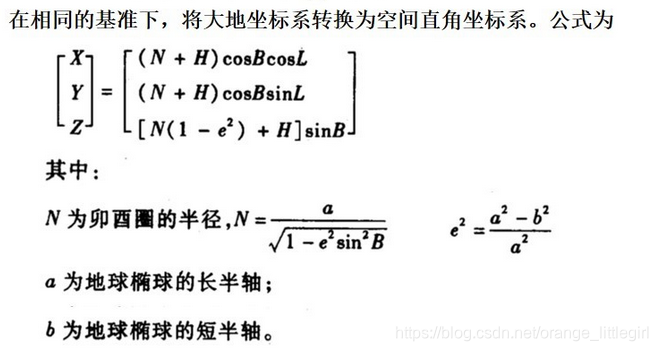
4.2大地坐标系转化为空间直角坐标系(BLH—>XYZ)
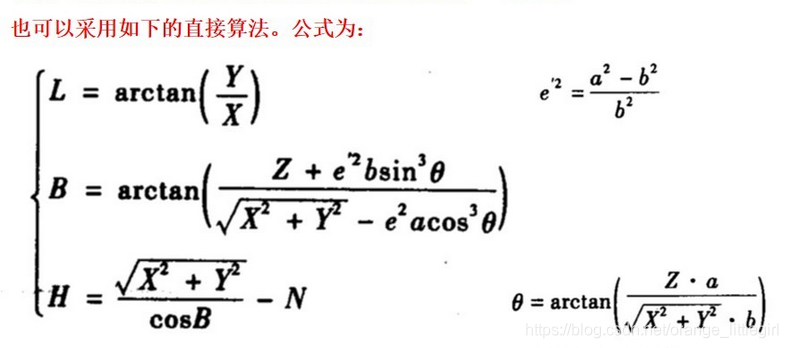
4.3空间直角坐标系转化为大地坐标系(XYZ—>BLH)
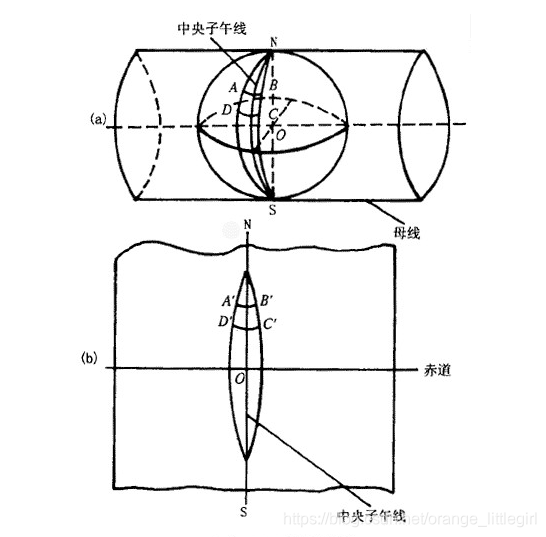
4.4高斯投影与UTW(墨卡托)投影
设想用一个椭圆柱横切于椭球面上投影带的中央子午线,按上述投影条件,将中央子午线两侧一定经差范围内的椭球面正形投影于椭圆柱面。将椭圆柱面沿过南北极的母线剪开展平,即为高斯投影平面。
高斯-克吕格投影在长度和面积上变形很小,中央经线无变形,自中央经线向投影带边缘,变形逐渐增加,变形最大之处在投影带内赤道的两端。由于其投影精度高,变形小,而且计算简便(各投影带坐标一致,只要算出一个带的数据,其他各带都能应用),因此在大比例尺地形图中应用,可以满足军事上各种需要,能在图上进行精确的量测计算。
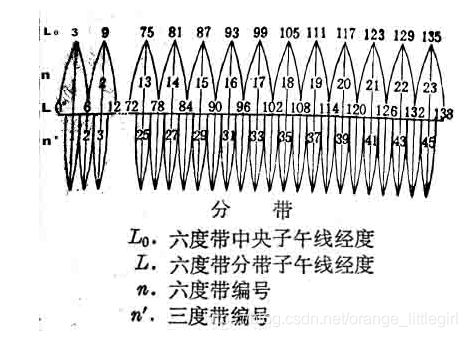
高斯-克吕格投影分带:按一定经差将地球椭球面划分成若干投影带,这是高斯投影中限制长度变形的最有效方法。分带时既要控制长度变形使其不大于测图误差,又要使带数不致过多以减少换带计算工作,据此原则将地球椭球面沿子午线划分成经差相等的瓜瓣形地带,以便分带投影。通常按经差6度或3度分为六度带或三度带。
注意:UTM投影与高斯投影的主要区别在南北格网线的比例系数上,高斯-克吕格投影的中央经线投影后保持长度不变,即比例系数为1,而UTM投影的比例系数为0.9996。UTM投影沿每一条南北格网线比例系数为常数,在东西方向则为变数,中心格网线的比例系数为0.9996,在南北纵行最宽部分的边缘上距离中心点大约 363公里,比例系数为 1.00158。
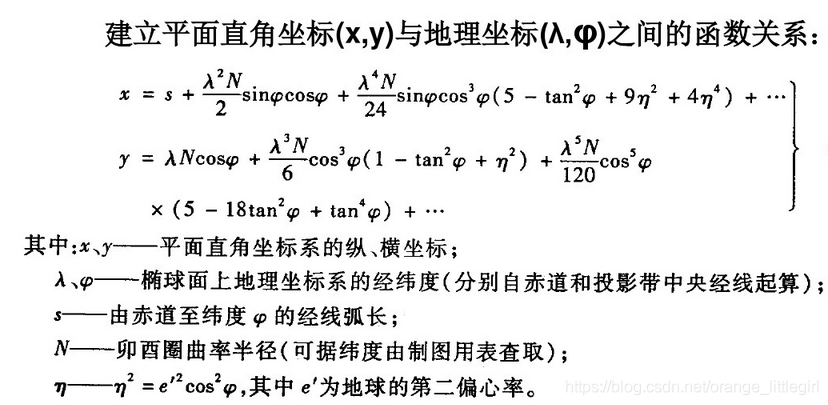
4.5高斯投影转换公式
其中地理坐标就是(B,L),平面直角坐标就是高斯-克吕格子的平面直角坐标
4.6高斯投影代码实战
注意这是从WGS84坐标系到高斯投影的转化,百度地图用的经纬度坐标并非是高斯WGS84,但是WGS84是世界通用的坐标系,经过测试其精确度还是可以的。
@author:cheng.jiang
#include "iostream"
#include "math.h"
using namespace std;
struct PingMian
{
double x;
double y;
double z;
};
struct WGS84
{
double longitude;//经度
double latitude;//纬度
double height;//高度
};
void GeodeticToCartesian(PingMian& pingmian, const WGS84& wgs84)
{
double b;//纬度度数
double L;//经度度数
double L0;//中央经线度数
double L1;//L - L0
double t;//tanB
double m;//ltanB
double N;//卯酉圈曲率半径
double q2;
double X;// 高斯平面纵坐标
double Y;// 高斯平面横坐标
double s;// 赤道至纬度B的经线弧长
double f; // 参考椭球体扁率
double e2;// 椭球第一偏心率
double a; // 参考椭球体长半轴
//
double a1;
double a2;
double a3;
double a4;
double b1;
double b2;
double b3;
double b4;
double c0;
double c1;
double c2;
double c3;
//
int Datum, prjno, zonewide;
double IPI;
//
Datum = 84;// 投影基准面类型:北京54基准面为54,西安80基准面为80,WGS84基准面为84
prjno = 0;// 投影带号
zonewide = 3;
IPI = 0.0174532925199433333333; // 3.1415926535898/180.0
b = wgs84.latitude; //纬度
L = wgs84.longitude;//经度
if (zonewide == 6)
{
prjno = trunc(L / zonewide) + 1;
L0 = prjno * zonewide - 3;
}
else
{
prjno = trunc((L - 1.5) / 3) + 1;
L0 = prjno * 3;
}
if (Datum == 54)
{
a = 6378245;
f = 1 / 298.3;
}
else if (Datum == 84)
{
a = 6378137;
f = 1 / 298.257223563;
}
//
L0 = L0 * IPI;
L = L * IPI;
b = b * IPI;
e2 = 2 * f - f * f; // (a*a-b*b)/(a*a);
L1 = L - L0;
t = tan(b);
m = L1 * cos(b);
N = a / sqrt(1 - e2 * sin(b) * sin(b));
q2 = e2 / (1 - e2) * cos(b) * cos(b);
a1 = 1 + 3 / 4 * e2 + 45 / 64 * e2 * e2 + 175 / 256 * e2 * e2 * e2 + 11025 /
16384 * e2 * e2 * e2 * e2 + 43659 / 65536 * e2 * e2 * e2 * e2 * e2;
a2 = 3 / 4 * e2 + 15 / 16 * e2 * e2 + 525 / 512 * e2 * e2 * e2 + 2205 /
2048 * e2 * e2 * e2 * e2 + 72765 / 65536 * e2 * e2 * e2 * e2 * e2;
a3 = 15 / 64 * e2 * e2 + 105 / 256 * e2 * e2 * e2 + 2205 / 4096 * e2 * e2 *
e2 * e2 + 10359 / 16384 * e2 * e2 * e2 * e2 * e2;
a4 = 35 / 512 * e2 * e2 * e2 + 315 / 2048 * e2 * e2 * e2 * e2 + 31185 /
13072 * e2 * e2 * e2 * e2 * e2;
b1 = a1 * a * (1 - e2);
b2 = -1 / 2 * a2 * a * (1 - e2);
b3 = 1 / 4 * a3 * a * (1 - e2);
b4 = -1 / 6 * a4 * a * (1 - e2);
c0 = b1;
c1 = 2 * b2 + 4 * b3 + 6 * b4;
c2 = -(8 * b3 + 32 * b4);
c3 = 32 * b4;
s = c0 * b + cos(b) * (c1 * sin(b) + c2 * sin(b) * sin(b) * sin(b) + c3 * sin
(b) * sin(b) * sin(b) * sin(b) * sin(b));
X = s + 1 / 2 * N * t * m * m + 1 / 24 * (5 - t * t + 9 * q2 + 4 * q2 * q2)
* N * t * m * m * m * m + 1 / 720 * (61 - 58 * t * t + t * t * t * t)
* N * t * m * m * m * m * m * m;
Y = N * m + 1 / 6 * (1 - t * t + q2) * N * m * m * m + 1 / 120 *
(5 - 18 * t * t + t * t * t * t - 14 * q2 - 58 * q2 * t * t)
* N * m * m * m * m * m;
Y = Y + 1000000 * prjno + 500000;
pingmian.x = X;
pingmian.y = Y;
pingmian.z = 0;
}
int main(void)
{
PingMian pingmian, pingmian2;
WGS84 wgs84, wgs84t;
wgs84.latitude = 39.924135;//纬度
wgs84.longitude = 116.40337;//经度
GeodeticToCartesian(pingmian, wgs84);
wgs84t.latitude = 40.000341;//纬度
wgs84t.longitude = 116.52899;//经度
GeodeticToCartesian(pingmian2, wgs84t);
printf("故宫博物院X = %f ; Y = %f;\r\n", pingmian.x, pingmian.y);
printf("北京工人体育场X = %f; Y = %f;\r\n", pingmian2.x, pingmian2.y);
system("pause");
return 0;
}
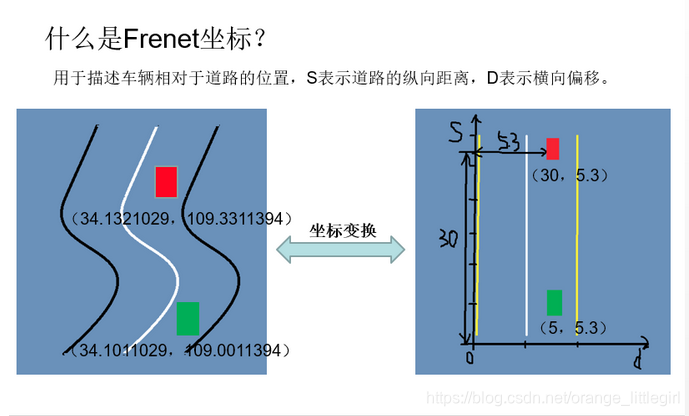
5.Frenet坐标
确定车和路之间的关系,我们通常将车辆的在大地坐标坐标转化为车辆和道路之间的frenet坐标。
在Frenet坐标系中,我们使用道路的中心线作为参考线,使用参考线的切线向量 t 和法线向量 n 建立一个坐标系,如下图的右图所示,这个坐标系即为Frenet坐标系,它以车辆自身为原点,坐标轴相互垂直,分为 s 方向(即沿着参考线的方向,通常被称为纵向,Longitudinal)和 d 方向(即参考线当前的法向,被称为横向,Lateral),相比于笛卡尔坐标系,Frenet坐标系明显地简化了问题,因为在公路行驶中,我们总是能够简单的找到道路的参考线(即道路的中心线),那么基于参考线的位置的表示就可以简单的使用纵向距离(即沿着道路方向的距离)和横向距离(即偏离参考线的距离)来描述,同样的,两个方向的速度(s˙ 和 d˙)的计算也相对简单。
本文不涉及规划和控制的知识,对Frenet有兴趣的同学参考以下链接:
AdamShan的博客


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









