







2018年的
第一部分,前言
这篇文章本身,我看作者,应该不是专心 搞 单目深度测距 MDE 的, 而是在做 VO :visual odemetry, 视觉测程;
只是吧 mde 加入 到了他的 vo 任务里面,提出一个新的名词:DVSO: deep virtual stereo odemetry
据他说,本文提出的 这个方法,相比 之前的 立体 vo 方法,那些 传统的,可以 克服 一些缺点,比如 scale drift
第二部分,半监督的 MDE
2.1 网络架构
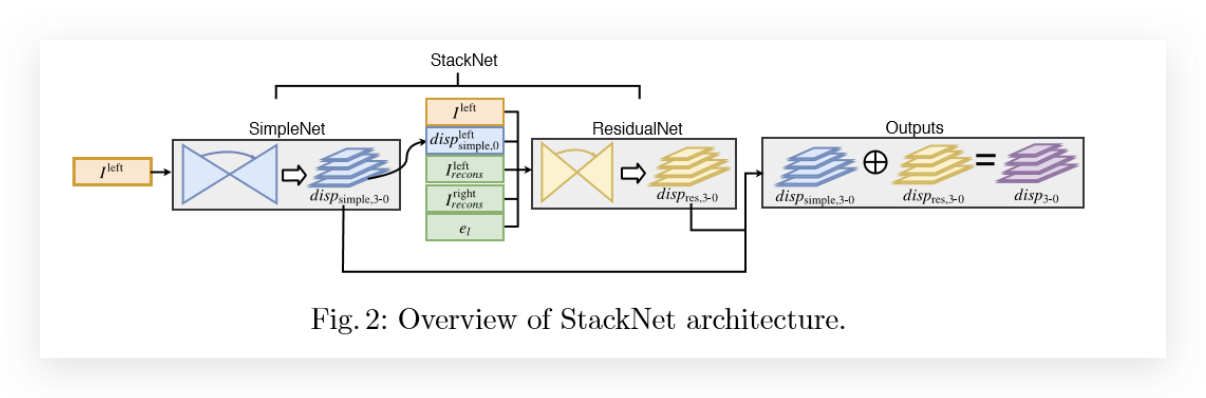
由两部分组成,第一个 叫做 simplenet 它的输出 ,打到 第二个 ,叫做 residual
net 的网络,输出 有 4个级别的清晰度/解析度。
2.2 loss 函数
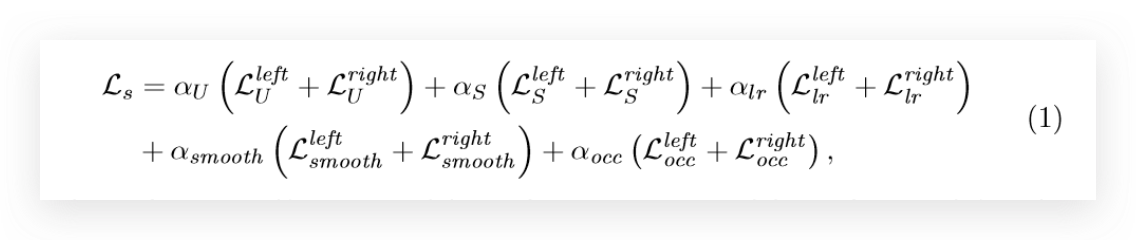
也是 由多个部分组成的,
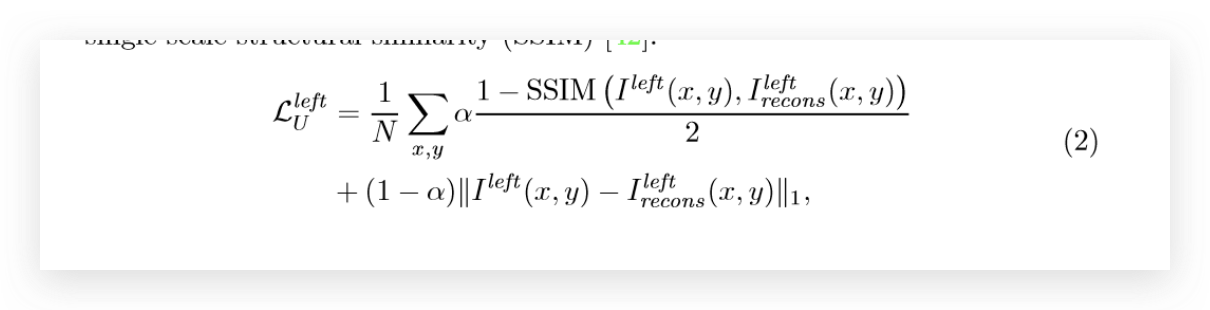
自监督loss, 里面 还是 有 熟悉 的 SSIM
有监督 loss

左右一致性的loss

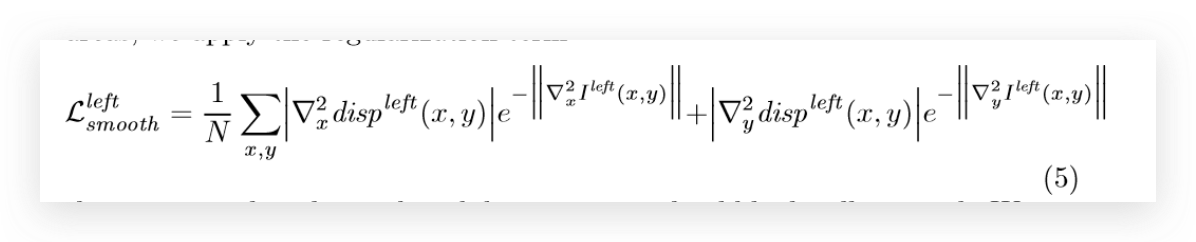
视差图 的 平滑 loss
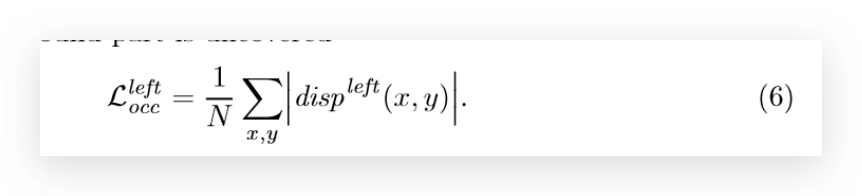
最后一个是:阻挡的正则项
立体算法里面,一定会遇到的问题,就是 左右 图 的遮挡 的不一致性;本文用了 一个 regularization
第三部分:说一说 深度虚拟立体测程
Deep Virtual Stereo Odometry (DVSO)
现在 我不关心,也看不懂
第四部分: 实验
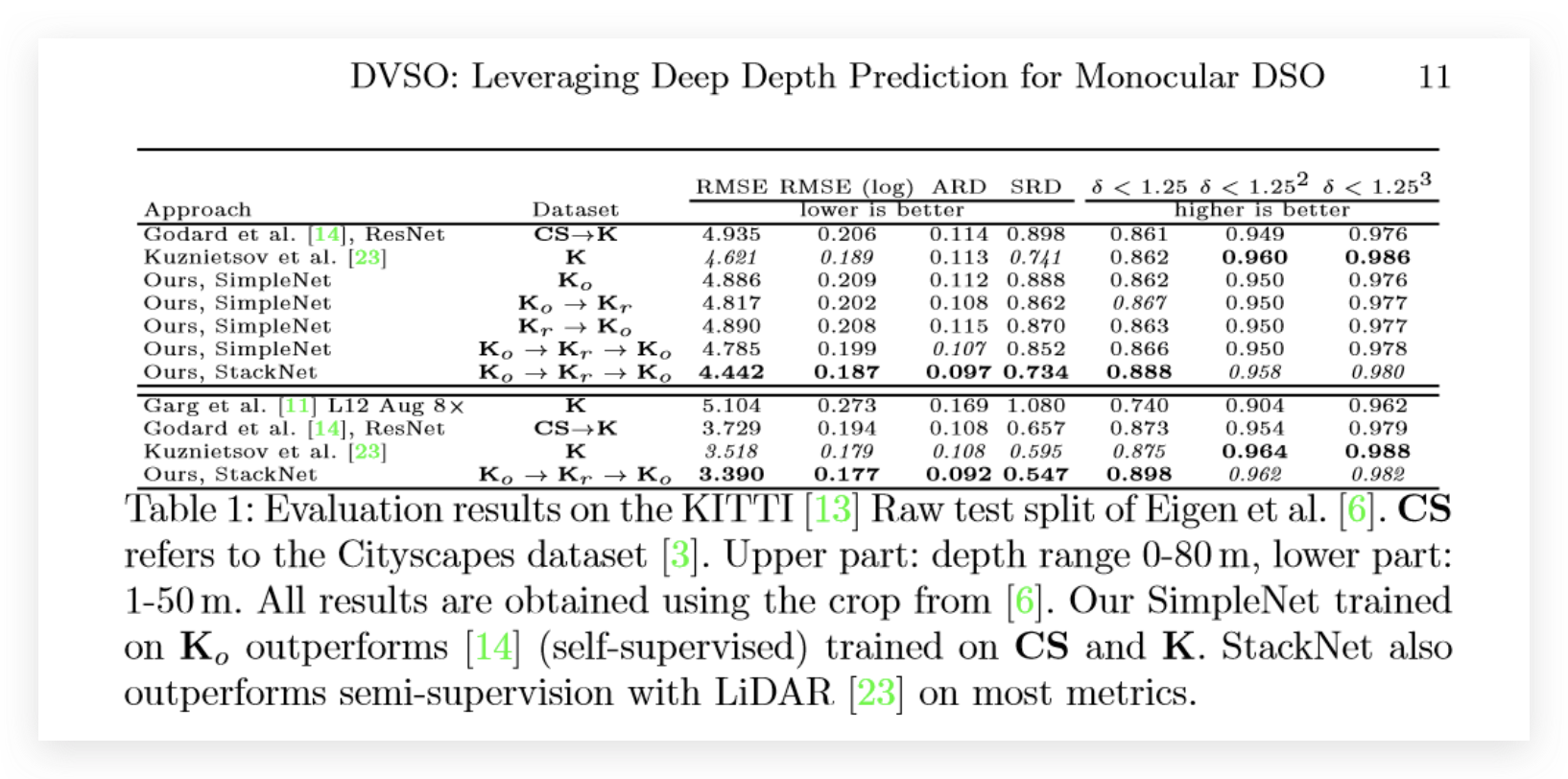
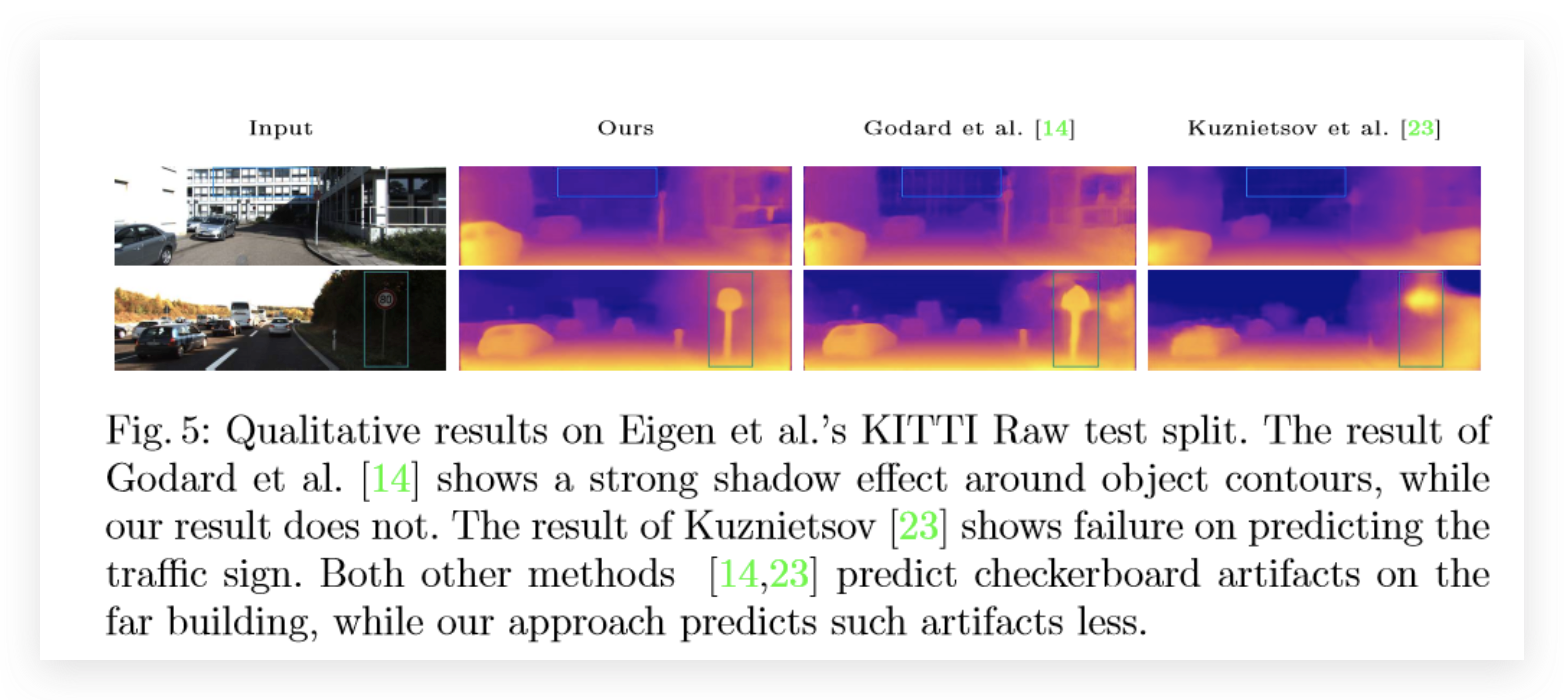
4.1 MDE 的实验结果
4.2 MVO 的实验结果
monocular visual odometry
虽然不关心,还是贴上来吧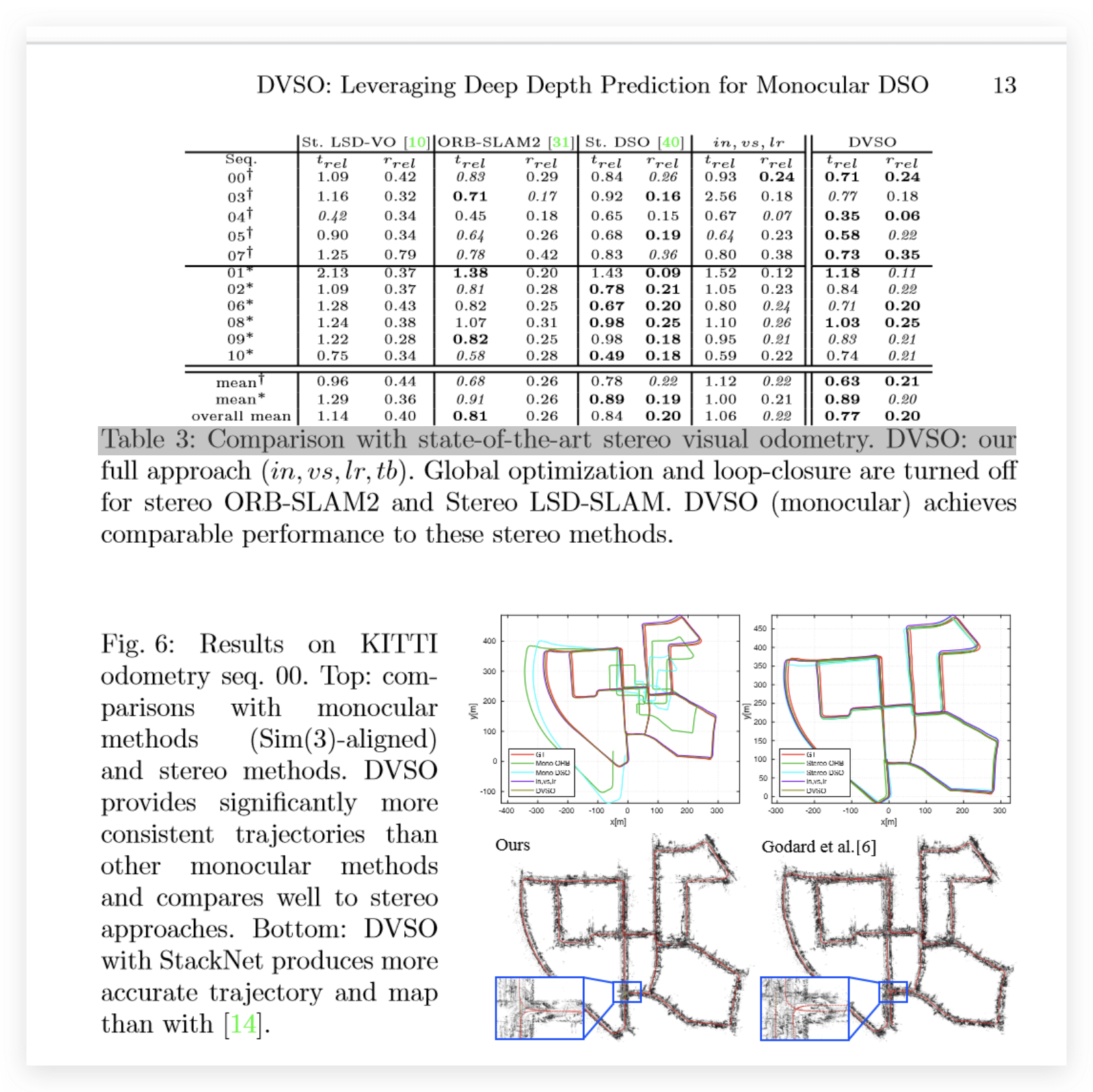
文章位置
https://www.jianguoyun.com/#/sandbox/dc043d/54d0d6ab9463fe2d/%2F1_forAllKnowLedge%2F%E5%8D%95%E7%9B%AE%E6%B5%8B%E8%B7%9D%E8%AE%BA%E6%96%87%E9%9B%86/?previewingFileName=Deep_Virtual_Stereo_ECCV_2018_paper.pdf















 2493
2493











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









