







目录
一、电池的保养
- 过放:电压远低于 21.6V
- 过充:上限是 26.3V
- 电池长期保存电压: 23.1V
不要满电保存,满电保存对航模电池的放电能力会有很大的影响
二、仿真遥控器与真机遥控器之间的模式对应关系

- 仿真中的遥控器

仿真中控制模式包含四种,分别是INIT、RC_POS_CONTROL、COMMAND_CONTROL、LAND_CONTROL下图为无人机运行时的控制状态机图
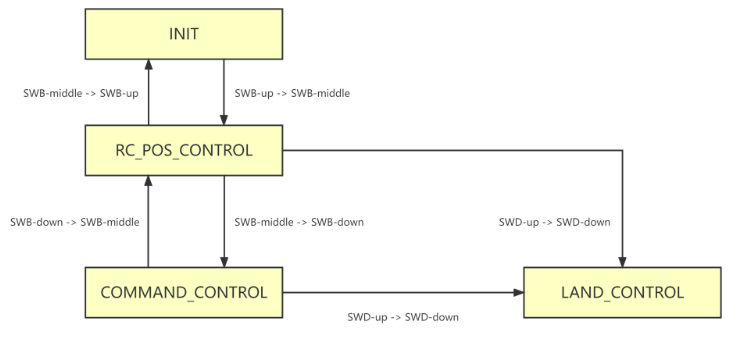
SWA/SWC/SWD档杆都属于触发型,而SWB档杆属于维持型
SWA档杆执行解上锁操作,触发解锁操作需要从上往下拨这个动作,而不是SWA档杆处于底部
SWB切换到某一模式,是因为档杆处于那个位置,而不是拨的动作。
- 仿真遥控器
SWB(Position) Channel 6 设置遥控器的时候,将通道6设置为position
- 真机遥控器
SWA (offboard模式)Channel 6
SWB 未设置
SWC (Stabilized --> Position --> Land) Channel 5
SWD (Return 返航模式) Channel 7















 478
478











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









