







Prometheus仿真切换为实机的修改注意事项:
在遥控器中:
1.遥控器在使用时,要先进行解开图形化的锁,解锁并进入之后,进入系统,然后进入摇杆模式,摇杆模式中的模式1为实机飞行,而模式2为仿真飞行。
2.如果要在gazebo仿真里面进行遥控器的控制,最好还是抠出一节电池,不扣除一个容易让电脑黑屏。
在QGC中:
1.遥控器的SWB的第一个是高度模式(可用遥控器进行控制无人机进行降落)。
2.第二个是定点模式(只有先进入这个模式,才能进入offboard模式,具体:将SWB档杆拨到中间位置时,无人机解锁后会直接进入RC_POS_CONTROL,而直接拨到底部位置时,无人机解锁后无法进入COMMAND_CONTROL,因为需要先进入RC_POS_CONTROL才能切入到COMMAND_CONTROL模式)。
3.第三个是offboard模式(该模式下时,是代码进行控制)。
在接口方面:
1.需要修改定位源,
因为px4版本的问题需要修改为3的模式就可以进行运行了。
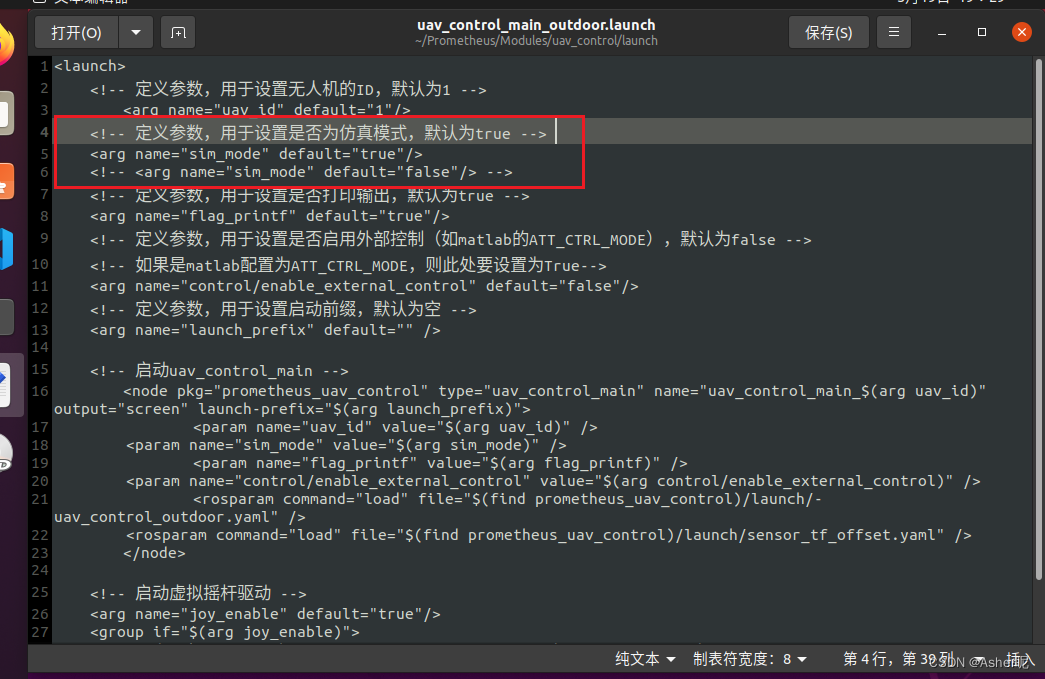
2.修改仿真为实机器
还有起飞降落的shell脚本

















 753
753

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









