






作者 群号 C语言交流中心 240137450 微信 15013593099
直方图均衡理论研究
我们先来看看原图的直方图

我们发现高亮区域的像素点很少,主要像素点集中在中低亮度区域
我们先设置一个阈值,也就是图中的那根粉色的线,
当某一亮度值的像素点的个数低于这个值时,我们认为这些像素点是无关紧要的。
灰度图的亮度值范围是0-255,若亮度值为1的像素点的个数低于阈值,我们可简单的把亮度为1的像素点的亮度
全设为0,同理,我们从高往低找,若亮度值为254的像素点的个数低于阈值,我们可以把这些像素点的亮度设为255
这样我们可以从小到大,从大到小分别找到两个亮度,它们的像素点的个数恰大于阈值
他们之间的区域,我们可以认为是有效区域,也就是蓝色框出来的区域
我们把这一区域扩展到0-255的区域去,可实现均衡化效果
编程实现为
cv::Mat Histogram::stretch1(const cv::Mat& image, int minValue) {
cv::MatND hist = getHistogram(image);
int imin =0;
for (; imin < histSize[0]; imin++) {
if (hist.at<float>(imin) > minValue) {
break;
}
}
int imax = histSize[0] -1;
for (; imax >=0; imax--) {
if (hist.at<float>(imax) > minValue) {
break;
}
}
cv::Mat lookup(cv::Size(1, 256), CV_8U);
for (int i =0; i <256; i++) {
if (i < imin) {
lookup.at<uchar>(i) =0;
} elseif (i > imax) {
lookup.at<uchar>(i) =255;
} else {
lookup.at<uchar>(i) = static_cast<uchar>(255.0* (i - imin)
/ (imax - imin) +0.5);}
}
cv::Mat result;
cv::LUT(image, lookup, result);
return result;
}对于cv::LUT函数,我之前就介绍过了

可以看出拉伸后的直方图和原直方图形状是一致的
再来看看另一种直方图均衡化的思路
理想的直方图均衡化效果是希望每个亮度的像素点的个数都相同
我们设原亮度为 i 的点均衡化后亮度为S(i),原亮度为 i 的点的个数为N(i)
其占总像素点的概率为p(i) = N(i) / SUM; SUM为像素点的总和
可以得到公式
S(0) = p(0)*255
S(1) = [p(0)+p(1)]*255
S(2) = [p(0)+p(1)+p(2)]*255
........
S(255) = [p(0)+p(1)+......+p(255)]*255 = 255
我们在原图中将亮度为 i 的像素点赋值为 S(i),就可以实现均衡化了
cv::Mat Histogram::stretch2(const cv::Mat& image) {
cv::MatND hist = getHistogram(image);
float scale[256];
float lookupF[256];
cv::Mat lookup(cv::Size(1, 256), CV_8U);
int pixNum = image.cols * image.rows;
for (int i =0; i <256; i++) {
scale[i] = hist.at<float>(i) / pixNum *255;
if (i ==0) {
lookupF[i] = scale[i];
} else {
lookupF[i] = lookupF[i -1] + scale[i];
}
}
for (int i =0; i <256; i++) {
lookup.at<uchar>(i) = static_cast<uchar>(lookupF[i]);
}
cv::Mat result;
cv::LUT(image, lookup, result);
return result;
}
cv::Mat Histogram::stretch3(const cv::Mat& image) {
cv::Mat result;
cv::equalizeHist(image, result);
return result;
}在这里,我们定义了两个函数,一个按照刚才的思路来实现
另一个是OpenCV2 提供的标准的均衡化函数
我们来看看效果

两种方法得到的效果和直方图的形状几乎一模一样
可见,标准的均衡化方法也是按此思路实现的
具体的源代码就不研究了
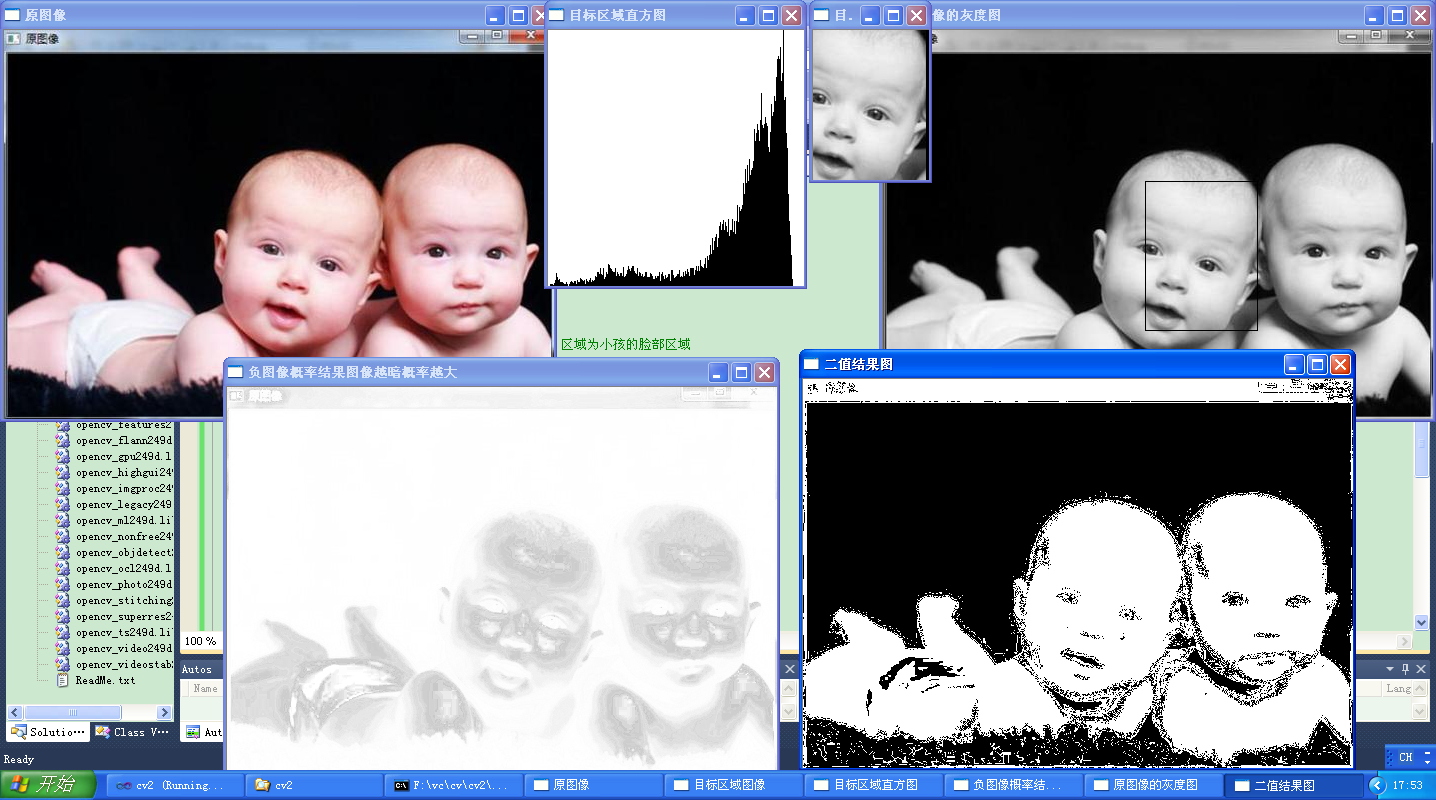
反投影直方图以检测待定的图像内容
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
#include "Histogram1D.h"
class ObjectFinder {
private:
float hranges[2];
const float* ranges[3];
int channels[3];
float threshold;
cv::MatND histogram;
cv::SparseMat shistogram;
public:
ObjectFinder() : threshold(0.1f){
ranges[0]= hranges;
ranges[1]= hranges;
ranges[2]= hranges;
}
// 设置阈值
void setThreshold(float t) {
threshold= t;
}
// 返回阈值
float getThreshold() {
return threshold;
}
// 设置目标直方图,进行归一化
void setHistogram(const cv::MatND& h) {
histogram= h;
cv::normalize(histogram,histogram,1.0);
}
// 查找属于目标直方图概率的像素
cv::Mat find(const cv::Mat& image) {
cv::Mat result;
hranges[0]= 0.0;
hranges[1]= 255.0;
channels[0]= 0;
channels[1]= 1;
channels[2]= 2;
cv::calcBackProject(&image,
1,
channels,
histogram,
result,
ranges,
255.0
);
// 通过阈值投影获得二值图像
if (threshold>0.0)
cv::threshold(result, result, 255*threshold, 255, cv::THRESH_BINARY);
return result;
}
};
int main()
{
//读取圆图像
cv::Mat initimage= cv::imread("f:\\img\\skin.jpg");
if (!initimage.data)
return 0;
//显示原图像
cv::namedWindow("原图像");
cv::imshow("原图像",initimage);
//读取灰度图像
cv::Mat image= cv::imread("f:\\img\\skin.jpg",0);
if (!image.data)
return 0;
//设置目标区域
cv::Mat imageROI;
imageROI= image(cv::Rect(262,151,113,150)); // 区域为小孩的脸部区域
//显示目标区域
cv::namedWindow("目标区域图像");
cv::imshow("目标区域图像",imageROI);
//计算目标区域直方图
Histogram1D h;
cv::MatND hist= h.getHistogram(imageROI);
cv::namedWindow("目标区域直方图");
cv::imshow("目标区域直方图",h.getHistogramImage(imageROI));
//创建检查类
ObjectFinder finder;
//将目标区域直方图传入检测类
finder.setHistogram(hist);
//初始化阈值
finder.setThreshold(-1.0f);
//进行反投影
cv::Mat result1;
result1= finder.find(image);
//创建负图像并显示概率结果
cv::Mat tmp;
result1.convertTo(tmp,CV_8U,-1.0,255.0);
cv::namedWindow("负图像概率结果图像越暗概率越大");
cv::imshow("负图像概率结果图像越暗概率越大",tmp);
//得到二值反投影图像
finder.setThreshold(0.01f);
result1= finder.find(image);
//在图像中绘制选中区域
cv::rectangle(image,cv::Rect(262,151,113,150),cv::Scalar(0,0,0));
//显示原图像
cv::namedWindow("原图像的灰度图");
cv::imshow("原图像的灰度图",image);
//二值结果图
cv::namedWindow("二值结果图");
cv::imshow("二值结果图",result1);
cv::waitKey();
return 0;
}Histogram1D.h
#if !defined HISTOGRAM
#define HISTOGRAM
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <iostream>
using namespace std;
using namespace cv;
class Histogram1D
{
private:
//直方图的点数
int histSize[1];
//直方图的范围
float hranges[2];
//指向该范围的指针
const float* ranges[1];
//通道
int channels[1];
public:
//构造函数
Histogram1D()
{
histSize[0] = 256;
hranges[0] = 0.0;
hranges[1] = 255.0;
ranges[0] = hranges;
channels[0] = 0;
}
Mat getHistogram(const Mat &image)
{
Mat hist;
//计算直方图函数
//参数为:源图像(序列)地址,输入图像的个数,通道数,掩码,输出结果,直方图维数,每一维的大小,每一维的取值范围
calcHist(&image,1,channels,Mat(),hist,1,histSize,ranges);
//这个函数虽然有很多参数,但是大多数时候,只会用于灰度图像或者彩色图像
//但是,允许通过指明一个多通道图像使用多幅图像
//第6个参数指明了直方图的维数
return hist;
}
Mat getHistogramImage(const Mat &image)
{
//首先计算直方图
Mat hist = getHistogram(image);
//获取最大值和最小值
double maxVal = 0;
double minVal = 0;
//minMaxLoc用来获得最大值和最小值,后面两个参数为最小值和最大值的位置,0代表不需要获取
minMaxLoc(hist,&minVal,&maxVal,0,0);
//展示直方图的画板:底色为白色
Mat histImg(histSize[0],histSize[0],CV_8U,Scalar(255));
//将最高点设为bin总数的90%
//int hpt = static_cast<int>(0.9*histSize[0]);
int hpt = static_cast<int>(histSize[0]);
//为每一个bin画一条线
for(int h = 0; h < histSize[0];h++)
{
float binVal = hist.at<float>(h);
int intensity = static_cast<int>(binVal*hpt/maxVal);
//int intensity = static_cast<int>(binVal);
line(histImg,Point(h,histSize[0]),Point(h,histSize[0]-intensity),Scalar::all(0));
}
return histImg;
}
Mat applyLookUp(const Mat& image,const Mat& lookup)
{
Mat result;
LUT(image,lookup,result);
return result;
}
Mat strech(const Mat &image,int minValue = 0)
{
//首先计算直方图
Mat hist = getHistogram(image);
//左边入口
int imin = 0;
for(;imin< histSize[0];imin++)
{
cout<<hist.at<float>(imin)<<endl;
if(hist.at<float>(imin) > minValue)
break;
}
//右边入口
int imax = histSize[0]-1;
for(;imax >= 0; imax--)
{
if(hist.at<float>(imax) > minValue)
break;
}
//创建查找表
int dim(256);
Mat lookup(1,&dim,CV_8U);
for(int i = 0; i < 256; i++)
{
if(i < imin)
{
lookup.at<uchar>(i) = 0;
}
else if(i > imax)
{
lookup.at<uchar>(i) = 255;
}
else
{
lookup.at<uchar>(i) = static_cast<uchar>(255.0*(i-imin)/(imax-imin)+0.5);
}
}
Mat result;
result = applyLookUp(image,lookup);
return result;
}
Mat equalize(const Mat &image)
{
Mat result;
equalizeHist(image,result);
return result;
}
};
#endif形状特征
#include "stdafx.h"
#include <cxcore.h>
#include <cv.h>
#include <highgui.h>
#include <math.h>
#include <iostream>
using namespace std;
#include <cv.h>
#include <cxcore.h>
#include <highgui.h>
#include <iostream>
using namespace std;
int main()
{
IplImage *src = cvLoadImage("c:\\img\\f.jpg",0);
IplImage *image = cvCreateImage(cvGetSize(src),8,3);
image = cvCloneImage(src);
cvNamedWindow("src",1);
cvNamedWindow("dst",1);
cvShowImage("src",src);
CvMemStorage *storage = cvCreateMemStorage(0);
CvSeq * seq = cvCreateSeq(CV_SEQ_ELTYPE_POINT, sizeof(CvSeq), sizeof(CvPoint), storage);
CvSeq * tempSeq = cvCreateSeq(CV_SEQ_ELTYPE_POINT, sizeof(CvSeq), sizeof(CvPoint), storage);
//新图,将轮廓绘制到dst
IplImage *dst = cvCreateImage(cvGetSize(src),8,3);
cvZero(dst);//赋值为0
double length,area;
//获取轮廓
int cnt = cvFindContours(src,storage,&seq);//返回轮廓的数目
cout<<"number of contours "<<cnt<<endl;
//计算边界序列的参数 长度 面积 矩形 最小矩形
//并输出每个边界的参数
CvRect rect;
CvBox2D box;
double axislong,axisShort;//长轴和短轴
double temp1= 0.0,temp2 = 0.0;
double Rectangle_degree;//矩形度
double long2short;//体态比
double x0,y0;
long sumX = 0 ,sumY = 0;
double sum =0.0;
int i,j,m,n;
unsigned char* ptr;
double UR;//区域重心到轮廓的平均距离
double PR;//区域重心到轮廓点的均方差
CvPoint * contourPoint;
int count = 0;
double CDegree;//圆形性
CvPoint *A,*B,*C;
double AB,BC,AC;
double cosA,sinA;
double tempR,inscribedR;
for (tempSeq = seq;tempSeq != NULL; tempSeq = tempSeq->h_next)
{
//tempSeq = seq->h_next;
length = cvArcLength(tempSeq);
area = cvContourArea(tempSeq);
cout<<"Length = "<<length<<endl;
cout<<"Area = "<<area<<endl;
cout<<"num of point "<<tempSeq->total<<endl;
//外接矩形
rect = cvBoundingRect(tempSeq,1);
//绘制轮廓和外接矩形
cvDrawContours(dst,tempSeq,CV_RGB(255,0,0),CV_RGB(255,0,0),0);
cvRectangleR(dst,rect,CV_RGB(0,255,0));
cvShowImage("dst",dst);
//cvWaitKey();
//绘制轮廓的最小外接圆
CvPoint2D32f center;//亚像素精度 因此需要使用浮点数
float radius;
cvMinEnclosingCircle(tempSeq,¢er,&radius);
cvCircle(dst,cvPointFrom32f(center),cvRound(radius),CV_RGB(100,100,100));
cvShowImage("dst",dst);
//cvWaitKey();
//寻找近似的拟合椭圆 可以使斜椭圆
CvBox2D ellipse = cvFitEllipse2(tempSeq);
cvEllipseBox(dst,ellipse,CV_RGB(255,255,0));
cvShowImage("dst",dst);
//cvWaitKey();
//绘制外接最小矩形
CvPoint2D32f pt[4];
box = cvMinAreaRect2(tempSeq,0);
cvBoxPoints(box,pt);
for(int i = 0;i<4;++i){
cvLine(dst,cvPointFrom32f(pt[i]),cvPointFrom32f(pt[((i+1)%4)?(i+1):0]),CV_RGB(0,0,255));
}
cvShowImage("dst",dst);
//cvWaitKey();
//下面开始分析图形的形状特征
//长轴 短轴
temp1 = sqrt(pow(pt[1].x -pt[0].x,2) + pow(pt[1].y -pt[0].y,2));
temp2 = sqrt(pow(pt[2].x -pt[1].x,2) + pow(pt[2].y -pt[1].y,2));
if (temp1 > temp2)
{
axislong = temp1;
axisShort=temp2;
}
else
{
axislong = temp2;
axisShort=temp1;
}
cout<<"long axis: "<<axislong<<endl;
cout<<"short axis: "<<axisShort<<endl;
//矩形度 轮廓面积和最小外接矩形面积(可以是斜矩形)之比
Rectangle_degree = (double)area/(axisShort*axislong);
cout<<"Rectangle degree :"<<Rectangle_degree<<endl;
//体态比or长宽比 最下外接矩形的长轴和短轴的比值
long2short = axislong/axisShort;
cout<<"ratio of long axis to short axis: "<<long2short<<endl;
//球状性 由于轮廓的内切圆暂时无法求出先搁置
//先求内切圆半径 枚举任意轮廓上的三个点,半径最小的就是内切圆的半径
//以下的最大内切圆半径求法有误 待改进
/*
for (int i = 0 ; i< tempSeq->total -2;i++)
{
for (int j= i+1; j<tempSeq->total-1;j++)
{
for (int m = j+1; m< tempSeq->total; m++)
{
//已知圆上三点,求半径
A = (CvPoint*)cvGetSeqElem(tempSeq ,i);
B = (CvPoint*)cvGetSeqElem(tempSeq ,j);
C = (CvPoint*)cvGetSeqElem(tempSeq,m);
AB = sqrt(pow((double)A->x - B->x,2)+ pow((double)A->y - B->y,2));
AC =sqrt(pow((double)A->x - C->x,2) + pow((double)A->y - C->y,2));
BC = sqrt(pow((double)B->x - C->x,2)+ pow((double)B->y - C->y,2));
cosA = ((B->x - A->x)*(C->x - A->x) + (B->y - A->y)*(C->y - A->y))/(AB*AC);
sinA = sqrt(1 - pow(cosA,2));
tempR = BC/(2*sinA);
if (m == 2)
{
inscribedR = tempR;
}
else
{
if (tempR < inscribedR)
{
inscribedR = tempR;
}
}
}
}
}
//输出最大内切圆半径
cout<<"radius of max inscribed circle "<<inscribedR<<endl;
*/
//圆形性 假设轮廓内是实心的
//球区域中心x0 y0
sumX = 0;
sumY = 0;
src = cvCloneImage(image);
for (int i = 0 ; i< src->height;i++)
{
for (int j = 0; j< src->width;j++)
{
ptr = (unsigned char *)src->imageData + i*src->widthStep + j;
if ((*ptr) > 128)
{
sumX += (long)j;
sumY += (long)i;
}
}
}
x0 = sumX/area;
y0 = sumY/area;
cout<<"center of gravity "<<x0<<" "<<y0<<endl;
//求区域到重心的平均距离
sum = 0;
count = 0;
for (m = 0 ; m< tempSeq->total;m++)
{
contourPoint = (CvPoint*)cvGetSeqElem(tempSeq,m);
sum += sqrt(pow(contourPoint->x - x0,2)+ pow(contourPoint->y - y0,2));
count++;
}
UR = sum/count;
cout<<"mean distance to center of gravity"<<UR<<endl;
//求区域重心到轮廓点的均方差
sum = 0;
for (m = 0 ; m< tempSeq->total;m++)
{
contourPoint = (CvPoint*)cvGetSeqElem(tempSeq,m);
temp1 = sqrt(pow(contourPoint->x - x0,2)+ pow(contourPoint->y - y0,2));
sum += pow(temp1 - UR,2);
}
PR = sum/count;
cout<<"mean square error of distance to center of gravity"<<PR<<endl;
//圆形性
CDegree= UR/PR;
cout<<"degree of circle "<<CDegree<<endl;
//中心距
cvWaitKey(0);
}
cvReleaseImage(&src);
cvReleaseImage(&dst);
cvReleaseMemStorage(&storage);
return 0;
}
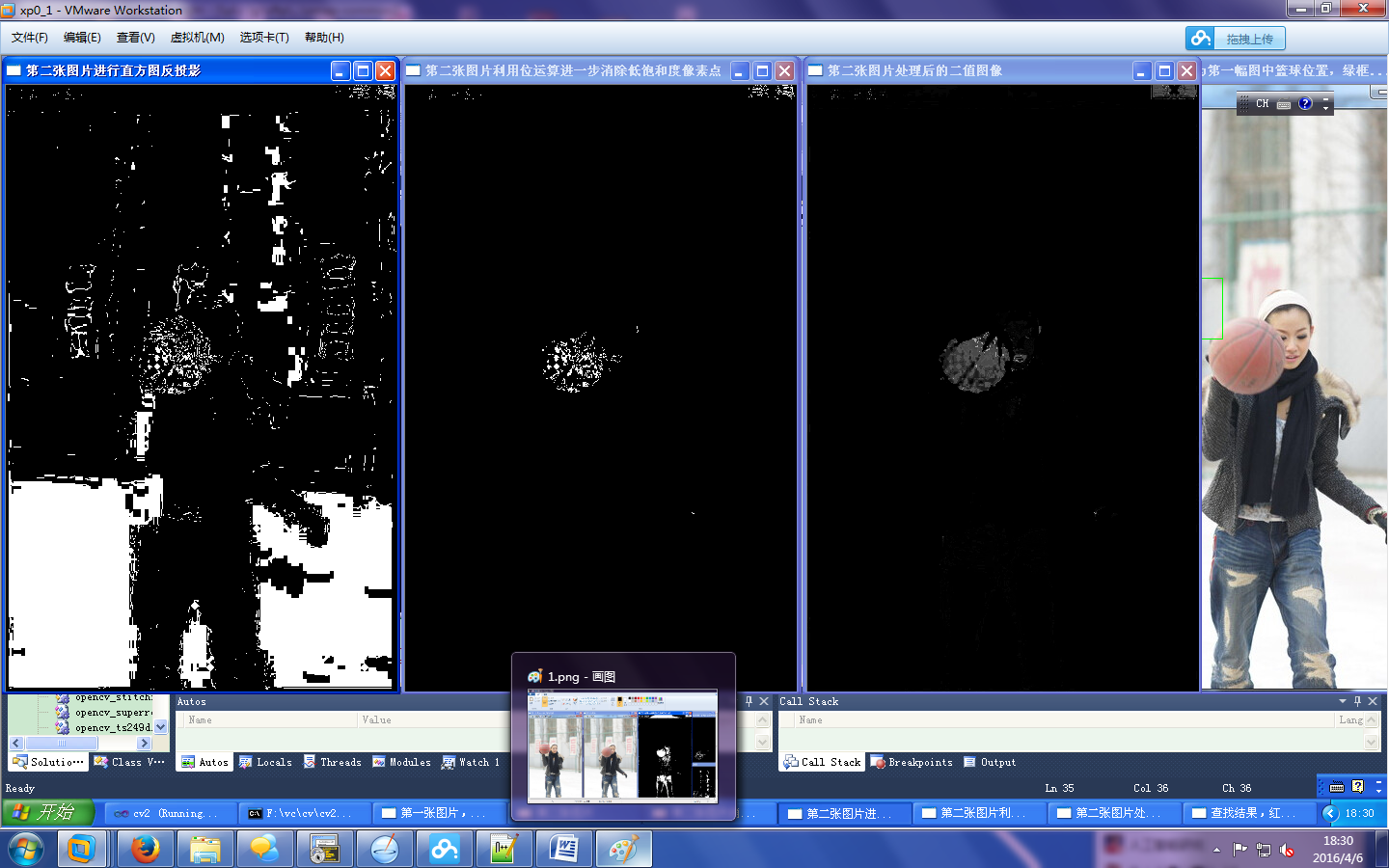
使用均值漂移算法查找物体

#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
#include "Histogram1D.h"
#include <iostream>
#include <vector>
#include "ContentFinder.h"
#include "colorhistogram.h"
int main()
{
//读取參考图像
cv::Mat image= cv::imread("f:\\img\\ball.jpg");
if (!image.data)
return 0;
//定义查找物体
cv::Mat imageROI= image(cv::Rect(85,200,64,64));
cv::rectangle(image, cv::Rect(85,200,64,64),cv::Scalar(0,0,255));
//显示參考图像
cv::namedWindow("第一张图片,标记篮球位置");
cv::imshow("第一张图片,标记篮球位置",image);
//获得色度直方图
ColorHistogram hc;
cv::MatND colorhist= hc.getHueHistogram(imageROI);
//读入目标图像
image= cv::imread("f:\\img\\ball2.jpg");
//显示目标图像
cv::namedWindow("第二张图片");
cv::imshow("第二张图片",image);
//将RGB图像图像转换为HSV图像
cv::Mat hsv;
cv::cvtColor(image, hsv, CV_BGR2HSV);
//分离图像通道
vector<cv::Mat> v;
cv::split(hsv,v);
//消除饱和度较低的像素点
int minSat=65;
cv::threshold(v[1],v[1],minSat,255,cv::THRESH_BINARY);
cv::namedWindow("第二张图片消除饱和度较低的像素点");
cv::imshow("第二张图片消除饱和度较低的像素点",v[1]);
//进行直方图反投影
ContentFinder finder;
finder.setHistogram(colorhist);
finder.setThreshold(0.3f);
int ch[1]={0};
cv::Mat result= finder.find(hsv,0.0f,180.0f,ch,1);
cv::namedWindow("第二张图片进行直方图反投影");
cv::imshow("第二张图片进行直方图反投影",result);
//利用位运算消除低饱和度像素
cv::bitwise_and(result,v[1],result);
cv::namedWindow("第二张图片利用位运算进一步消除低饱和度像素点");
cv::imshow("第二张图片利用位运算进一步消除低饱和度像素点",result);
// 得到反投影直方图概率图像
finder.setThreshold(-1.0f);
result= finder.find(hsv,0.0f,180.0f,ch,1);
cv::bitwise_and(result,v[1],result);
cv::namedWindow("第二张图片处理后的二值图像");
cv::imshow("第二张图片处理后的二值图像",result);
cv::Rect rect(85,200,64,64);
cv::rectangle(image, rect, cv::Scalar(0,0,255));
cv::TermCriteria criteria(cv::TermCriteria::MAX_ITER,10,0.01);
cout << "均值漂移迭代次数 = " << cv::meanShift(result,rect,criteria) << endl;
cv::rectangle(image, rect, cv::Scalar(0,255,0));
//展示结果图
cv::namedWindow("查找结果,红框为第一幅图中篮球位置,绿框为现位置");
cv::imshow("查找结果,红框为第一幅图中篮球位置,绿框为现位置",image);
cv::waitKey();
return 0;
} #if!defined CONTENTFINDER
#define CONTENTFINDER
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
using namespace cv;
class ContentFinder
{
private:
float hranges[2];
const float* ranges[3];
int channels[3];
float threshold;
Mat histogram;
public:
ContentFinder():threshold(-1.0f)
{
//所有通道的范围相同
ranges[0] = hranges;
ranges[1] = hranges;
ranges[2] = hranges;
}
//设置门限参数[0,1]
void setThreshold(float t)
{
threshold = t;
}
//获取门限参数
float getThreshold()
{
return threshold;
}
//设置参考的直方图
void setHistogram(const Mat& h)
{
histogram = h;
normalize(histogram,histogram,1.0);
}
//简单的利用反向投影直方图寻找
Mat find(const Mat& image)
{
Mat result;
hranges[0] = 0.0;
hranges[1] = 255.0;
channels[0] = 0;
channels[1] = 1;
channels[2] = 2;
calcBackProject(&image,1,channels,histogram,result,ranges,255.0);
if (threshold>0.0)
{
cv::threshold(result, result, 255*threshold, 255, cv::THRESH_BINARY);
}
return result;
}
//复杂的利用反向投影直方图,增加了一些参数
Mat find(const Mat &image,float minValue,float maxValue,int *channels,int dim)
{
Mat result;
hranges[0] = minValue;
hranges[1] = maxValue;
for(int i = 0;i < dim;i++)
{
this->channels[i] = channels[i];
}
calcBackProject(&image,1,channels,histogram,result,ranges,255.0);
if(threshold >0.0)
cv::threshold(result,result, 255*threshold,255,THRESH_BINARY);
return result;
}
};
#endif #if!defined COLORHISTOGRAM
#define COLORHISTOGRAM
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
using namespace cv;
class ColorHistogram
{
private:
int histSize[3];
float hranges[2];
const float* ranges[3];
int channels[3];
public:
//构造函数
ColorHistogram()
{
histSize[0]= histSize[1]= histSize[2]= 256;
hranges[0] = 0.0;
hranges[1] = 255.0;
ranges[0] = hranges;
ranges[1] = hranges;
ranges[2] = hranges;
channels[0] = 0;
channels[1] = 1;
channels[2] = 2;
}
//计算彩色图像直方图
Mat getHistogram(const Mat& image)
{
Mat hist;
//BGR直方图
hranges[0]= 0.0;
hranges[1]= 255.0;
channels[0]= 0;
channels[1]= 1;
channels[2]= 2;
//计算
calcHist(&image,1,channels,Mat(),hist,3,histSize,ranges);
return hist;
}
//计算颜色的直方图
Mat getHueHistogram(const Mat &image)
{
Mat hist;
Mat hue;
//转换到HSV空间
cvtColor(image,hue,CV_BGR2HSV);
//设置1维直方图使用的参数
hranges[0] = 0.0;
hranges[1] = 180.0;
channels[0] = 0;
//计算直方图
calcHist(&hue,1,channels,Mat(),hist,1,histSize,ranges);
return hist;
}
//减少颜色
Mat colorReduce(const Mat &image,int div = 64)
{
int n = static_cast<int>(log(static_cast<double>(div))/log(2.0));
uchar mask = 0xFF<<n;
Mat_<Vec3b>::const_iterator it = image.begin<Vec3b>();
Mat_<Vec3b>::const_iterator itend = image.end<Vec3b>();
//设置输出图像
Mat result(image.rows,image.cols,image.type());
Mat_<Vec3b>::iterator itr = result.begin<Vec3b>();
for(;it != itend;++it,++itr)
{
(*itr)[0] = ((*it)[0]&mask) + div/2;
(*itr)[1] = ((*it)[1]&mask) + div/2;
(*itr)[2] = ((*it)[2]&mask) + div/2;
}
return result;
}
};
#endif #if !defined HISTOGRAM
#define HISTOGRAM
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <iostream>
using namespace std;
using namespace cv;
class Histogram1D
{
private:
//直方图的点数
int histSize[1];
//直方图的范围
float hranges[2];
//指向该范围的指针
const float* ranges[1];
//通道
int channels[1];
public:
//构造函数
Histogram1D()
{
histSize[0] = 256;
hranges[0] = 0.0;
hranges[1] = 255.0;
ranges[0] = hranges;
channels[0] = 0;
}
Mat getHistogram(const Mat &image)
{
Mat hist;
//计算直方图函数
//参数为:源图像(序列)地址,输入图像的个数,通道数,掩码,输出结果,直方图维数,每一维的大小,每一维的取值范围
calcHist(&image,1,channels,Mat(),hist,1,histSize,ranges);
//这个函数虽然有很多参数,但是大多数时候,只会用于灰度图像或者彩色图像
//但是,允许通过指明一个多通道图像使用多幅图像
//第6个参数指明了直方图的维数
return hist;
}
Mat getHistogramImage(const Mat &image)
{
//首先计算直方图
Mat hist = getHistogram(image);
//获取最大值和最小值
double maxVal = 0;
double minVal = 0;
//minMaxLoc用来获得最大值和最小值,后面两个参数为最小值和最大值的位置,0代表不需要获取
minMaxLoc(hist,&minVal,&maxVal,0,0);
//展示直方图的画板:底色为白色
Mat histImg(histSize[0],histSize[0],CV_8U,Scalar(255));
//将最高点设为bin总数的90%
//int hpt = static_cast<int>(0.9*histSize[0]);
int hpt = static_cast<int>(histSize[0]);
//为每一个bin画一条线
for(int h = 0; h < histSize[0];h++)
{
float binVal = hist.at<float>(h);
int intensity = static_cast<int>(binVal*hpt/maxVal);
//int intensity = static_cast<int>(binVal);
line(histImg,Point(h,histSize[0]),Point(h,histSize[0]-intensity),Scalar::all(0));
}
return histImg;
}
Mat applyLookUp(const Mat& image,const Mat& lookup)
{
Mat result;
LUT(image,lookup,result);
return result;
}
Mat strech(const Mat &image,int minValue = 0)
{
//首先计算直方图
Mat hist = getHistogram(image);
//左边入口
int imin = 0;
for(;imin< histSize[0];imin++)
{
cout<<hist.at<float>(imin)<<endl;
if(hist.at<float>(imin) > minValue)
break;
}
//右边入口
int imax = histSize[0]-1;
for(;imax >= 0; imax--)
{
if(hist.at<float>(imax) > minValue)
break;
}
//创建查找表
int dim(256);
Mat lookup(1,&dim,CV_8U);
for(int i = 0; i < 256; i++)
{
if(i < imin)
{
lookup.at<uchar>(i) = 0;
}
else if(i > imax)
{
lookup.at<uchar>(i) = 255;
}
else
{
lookup.at<uchar>(i) = static_cast<uchar>(255.0*(i-imin)/(imax-imin)+0.5);
}
}
Mat result;
result = applyLookUp(image,lookup);
return result;
}
Mat equalize(const Mat &image)
{
Mat result;
equalizeHist(image,result);
return result;
}
};
#endif通过直方图比较检索相似图片
CompareHist(),是比较两个统计直方图的分布,总共有四个方法,被定义如下:
#define CV_COMP_CORREL 0
#define CV_COMP_CHISQR 1
#define CV_COMP_INTERSECT2
#define CV_COMP_BHATTACHARYYA3
而这些方法分别为相关系数,卡方,交集法以及在做常态分布比对的Bhattacharyya距离,这些方法都是用来做统计直方图的相似度比较的方法,而且,都是根据统计学的概念,这边就简单的拿来用灰阶统计直方图来比较,而这部份的比较方式,是由图形的色彩结构来着手,下面就简单的用三种情况来分析它们距离比较的方式
#include "opencv2/highgui/highgui.hpp"
#include "opencv/cv.hpp"
//画直方图用
int HistogramBins = 256;
float HistogramRange1[2]={0,255};
float *HistogramRange[1]={&HistogramRange1[0]};
/*
* imagefile1:
* imagefile2:
* method: could be CV_COMP_CHISQR, CV_COMP_BHATTACHARYYA, CV_COMP_CORREL, CV_COMP_INTERSECT
*/
int CompareHist(const char* imagefile1, const char* imagefile2)
{
IplImage *image1=cvLoadImage(imagefile1, 0);
IplImage *image2=cvLoadImage(imagefile2, 0);
CvHistogram *Histogram1 = cvCreateHist(1, &HistogramBins, CV_HIST_ARRAY,HistogramRange);
CvHistogram *Histogram2 = cvCreateHist(1, &HistogramBins, CV_HIST_ARRAY,HistogramRange);
cvCalcHist(&image1, Histogram1);
cvCalcHist(&image2, Histogram2);
cvNormalizeHist(Histogram1, 1);
cvNormalizeHist(Histogram2, 1);
// CV_COMP_CHISQR,CV_COMP_BHATTACHARYYA这两种都可以用来做直方图的比较,值越小,说明图形越相似
printf("CV_COMP_CHISQR : %.4f\n", cvCompareHist(Histogram1, Histogram2, CV_COMP_CHISQR));
printf("CV_COMP_BHATTACHARYYA : %.4f\n", cvCompareHist(Histogram1, Histogram2, CV_COMP_BHATTACHARYYA));
// CV_COMP_CORREL, CV_COMP_INTERSECT这两种直方图的比较,值越大,说明图形越相似
printf("CV_COMP_CORREL : %.4f\n", cvCompareHist(Histogram1, Histogram2, CV_COMP_CORREL));
printf("CV_COMP_INTERSECT : %.4f\n", cvCompareHist(Histogram1, Histogram2, CV_COMP_INTERSECT));
cvReleaseImage(&image1);
cvReleaseImage(&image2);
cvReleaseHist(&Histogram1);
cvReleaseHist(&Histogram2);
return 0;
}
int main(int argc, char* argv[])
{
CompareHist(argv[1], argv[2]);
//CompareHist("d:\\camera.jpg", "d:\\camera1.jpg");
system("pause");
return 0;
} 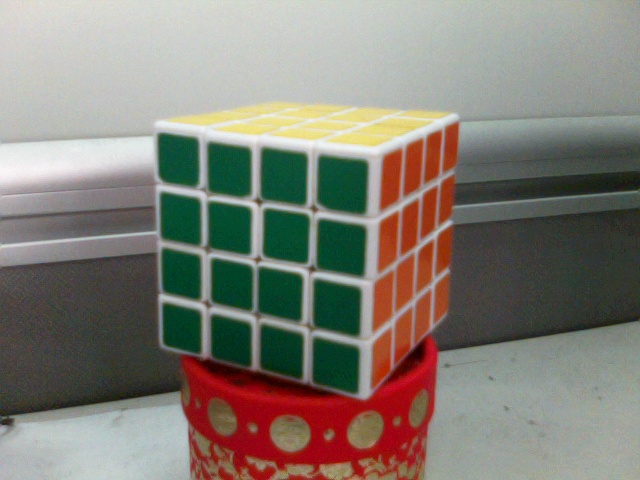
图1
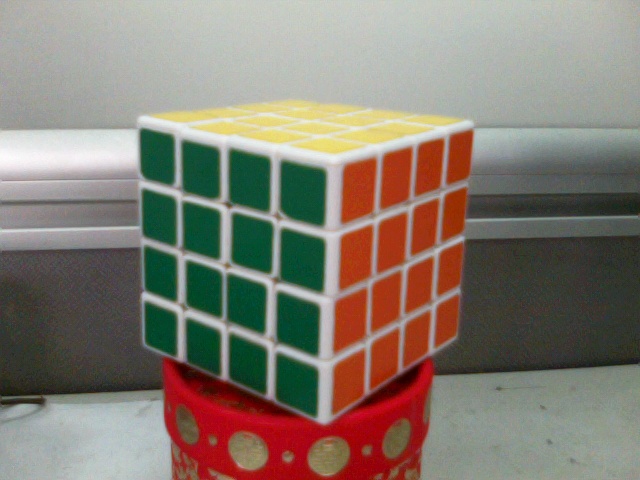
图2
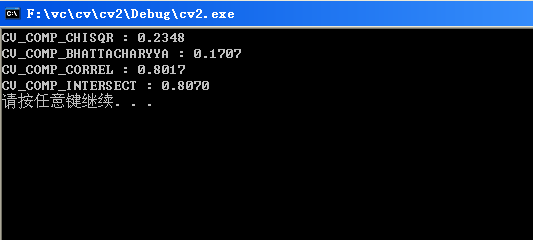
结果
亮度变换
#include "opencv\\cv.h"
#include "opencv\\highgui.h"
/*
src and dst are grayscale, 8-bit images;
Default input value:
[low, high] = [0,1]; X-Direction
[bottom, top] = [0,1]; Y-Direction
gamma ;
if adjust successfully, return 0, otherwise, return non-zero.
*/
int ImageAdjust(IplImage* src, IplImage* dst,
double low, double high, // X方向:low and high are the intensities of src
double bottom, double top, // Y方向:mapped to bottom and top of dst
double gamma )
{
if( low<0 && low>1 && high <0 && high>1&&
bottom<0 && bottom>1 && top<0 && top>1 && low>high)
return -1;
double low2 = low*255;
double high2 = high*255;
double bottom2 = bottom*255;
double top2 = top*255;
double err_in = high2 - low2;
double err_out = top2 - bottom2;
int x,y;
double val;
// intensity transform
for( y = 0; y < src->height; y++)
{
for (x = 0; x < src->width; x++)
{
val = ((uchar*)(src->imageData + src->widthStep*y))[x];
val = pow((val - low2)/err_in, gamma) * err_out + bottom2;
if(val>255) val=255; if(val<0) val=0; // Make sure src is in the range [low,high]
((uchar*)(dst->imageData + dst->widthStep*y))[x] = (uchar) val;
}
}
return 0;
}
int main( int argc, char** argv )
{
IplImage *src = 0, *dst = 0;
src=cvLoadImage("f:\\img\\c2.jpg", 0); // force to gray image
if(src==0)return 0;
cvNamedWindow( "src", 1 );
cvNamedWindow( "result", 1 );
// Image adjust
dst = cvCloneImage(src);
// 输入参数 [0,0.5] 和 [0.5,1], gamma=1
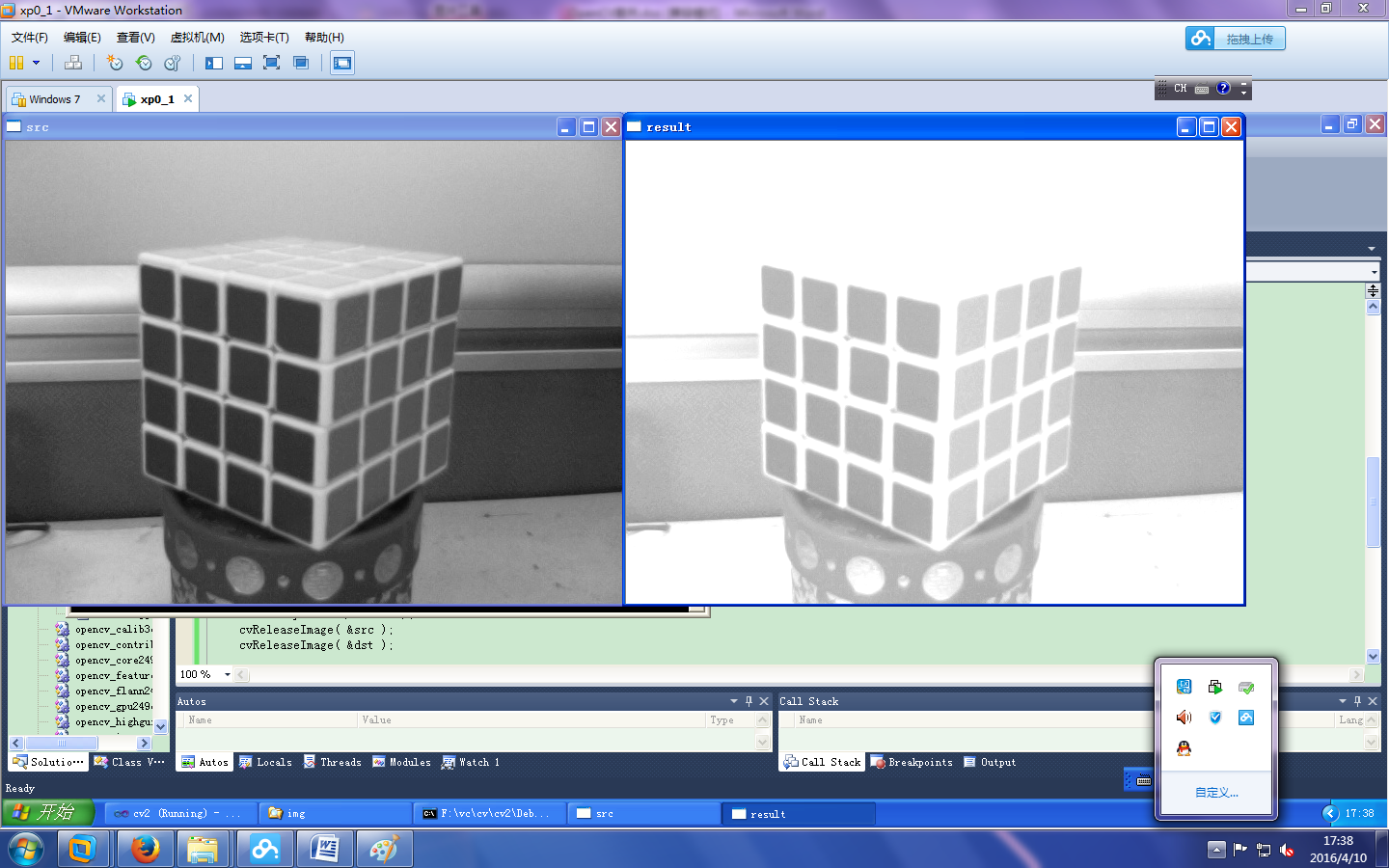
if( ImageAdjust( src, dst, 0, 0.5, 0.5, 1, 1)!=0) return -1;
cvShowImage( "src", src );
cvShowImage( "result", dst );
cvWaitKey(0);
cvDestroyWindow("src");
cvDestroyWindow("result");
cvReleaseImage( &src );
cvReleaseImage( &dst );
return 0;
}















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









