







 本文深入探讨了Snap轨迹规划中的corridor概念,如何构建和约束corridor以确保轨迹在允许的通道内。同时,文章讨论了时间分配的重要性,包括初始分配、可行性检查和corridor对时间分配的影响。通过对中间点的处理和归一化时间参数的使用,实现了更平滑的轨迹规划。
本文深入探讨了Snap轨迹规划中的corridor概念,如何构建和约束corridor以确保轨迹在允许的通道内。同时,文章讨论了时间分配的重要性,包括初始分配、可行性检查和corridor对时间分配的影响。通过对中间点的处理和归一化时间参数的使用,实现了更平滑的轨迹规划。
在上一篇文章中,我们得到的轨迹并不是很好,与路径差别有点大,我们期望规划出的轨迹跟路径大致重合,而且不希望有打结的现象,而且希望轨迹中的速度和加速度不超过最大限幅值。为了解决这些问题有两种思路:
- 思路一:把这些”期望“加入到优化问题中。
- 思路二:调整时间分配,来避免这些问题。
1.corridor
1.1 corridor是什么?
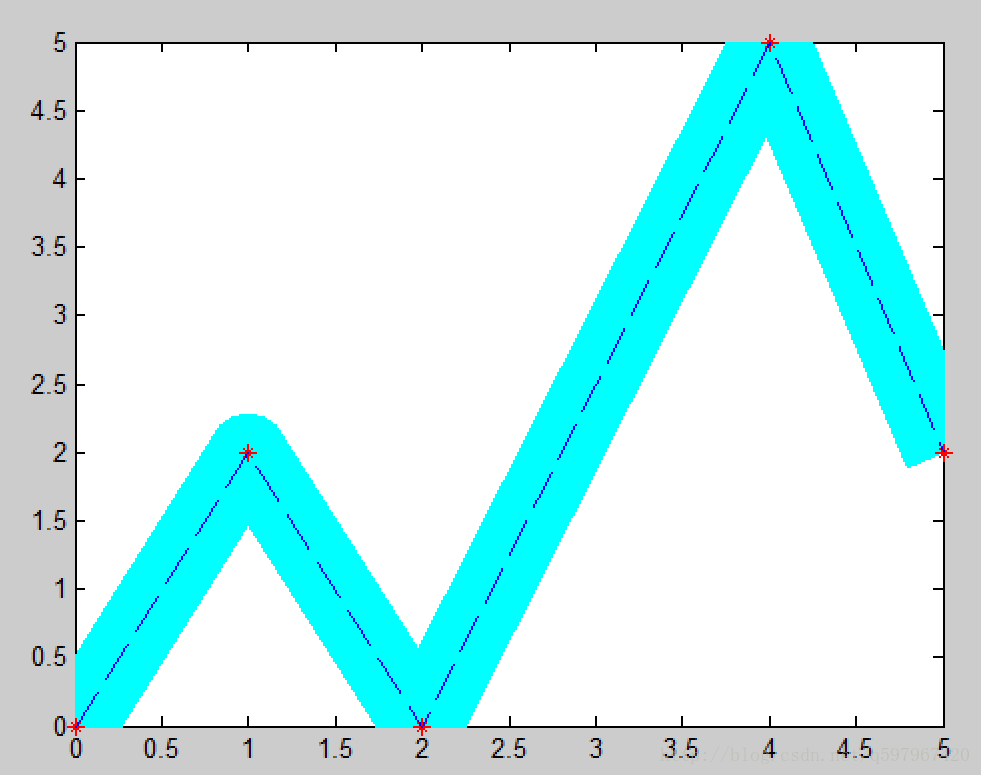
为了限制轨迹的形状,引入了corridor的概念,corridor可以理解为可行通道,如下图,规划出的轨迹必须在corridor内。直观的思路是:如果能把corridor当作约束加入到QP问题中,那么解得的轨迹自然就在corridor内了。
1.2 corridor约束怎么加?
很容易想到,把之前的等式约束 Ap=d 改成不等式约束 Ap≤d1 和 Ap≥d2 。然而,不管是等式约束还是不等式约束,都是针对一个特定的时刻,而实际希望的是对所有时刻 t∈[0,T] ,都需要在corridor中。
一个简单粗暴的思路:在路径上多采样一些中间点,每个中间点都加corridor约束。尽管这种方法理论上只能保证采样点在corridor中,但实际过程中,如果corridor大小和采样步长设置得合理,而且不Fix waypoints,能work的比较好。这里不fix 中间点的位置,是为了去掉中间点的强约束,尽量避免轨迹打结,实际中,我们也是不一样要求轨迹完全经过中间点,只要在那附近(corridor)内就行。
1.3 构造corridor不等式约束
为了方便构造,对于每一个采样点 pt ,我们施加一个矩形的corridor,即
xmin≤ptx≤xmax, ymin≤pty≤ymax
这里用矩形corridor是因为斜线corridor(平行四边形)不好构造,而且我们只需要大致在corridor里面就好,没有必要非弄一个严格的斜线corridor。对于每个采样点,设矩形corridor的边长为 2r ,增加两个位置不等式约束:
[1,ti,t2i,...,tni]p≤p(ti)+r[−1,−ti,−t2i,...,−t
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5万+
5万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









