






 本文提出一种自适应二分时变控制策略,针对有向图环境下的多智能体编队问题,通过理论分析确保收敛性和稳定性,并通过仿真实验验证其有效性。研究了多智能体系统中的编队控制挑战和动态环境适应性。
本文提出一种自适应二分时变控制策略,针对有向图环境下的多智能体编队问题,通过理论分析确保收敛性和稳定性,并通过仿真实验验证其有效性。研究了多智能体系统中的编队控制挑战和动态环境适应性。
有向图下多智能体自适应二分时变编队控制;多智能体编队;自适应二分时变;有向图(有参考文献)
有向图下多智能体自适应二分时变编队控制
摘要:多智能体系统中的编队控制一直是一个备受关注的研究领域。本文针对有向图下多智能体系统的编队控制问题,提出了一种自适应二分时变的控制策略。通过对编队目标的分析,我们设计了合适的控制器来实现编队的形成和维持。本文通过理论分析,证明了所提出的控制策略在有向图的情况下能够保证编队的收敛性和稳定性。最后,通过仿真实验验证了该控制策略的有效性。
关键词:多智能体编队、自适应二分时变、有向图、控制策略、收敛性、稳定性
1. 引言
多智能体编队控制是指利用协作控制策略,使得多个智能体能够按照一定的形态和规则进行编队,实现一定的任务目标。编队控制在许多领域有广泛的应用,如机器人编队、车辆编队等。在实际应用中,多智能体编队控制面临着许多挑战,如通信拓扑的变化、智能体的动力学特性不同等。
2. 相关工作
多智能体编队控制的相关研究已经取得了一定的进展。早期的研究主要集中在静态拓扑结构下的编队控制,如基于图论的方法。然而,实际环境中多智能体系统的拓扑结构通常是动态变化的,这就需要使用动态控制策略来处理。近年来,一些研究者提出了自适应控制方法,使得编队能够适应拓扑变化。
3. 问题定义
在本文中,我们考虑了有向图下的多智能体编队控制问题。给定一个有向图,图中的每个节点代表一个智能体,节点之间的有向边表示智能体之间的通信关系。我们的目标是设计一个自适应的控制策略,使得多个智能体能够按照一定的编队形式进行运动。
4. 自适应二分时变编队控制策略
为了实现多智能体的编队控制,我们设计了一种自适应二分时变的控制策略。具体来说,我们首先确定了编队目标,即每个智能体在编队中所应具有的位置和速度要求。然后,我们设计了相应的控制器,根据每个智能体的状态及编队目标,计算出控制输入。控制输入包括位置控制和速度控制两部分,分别用于控制智能体的位置和速度。
5. 控制器设计
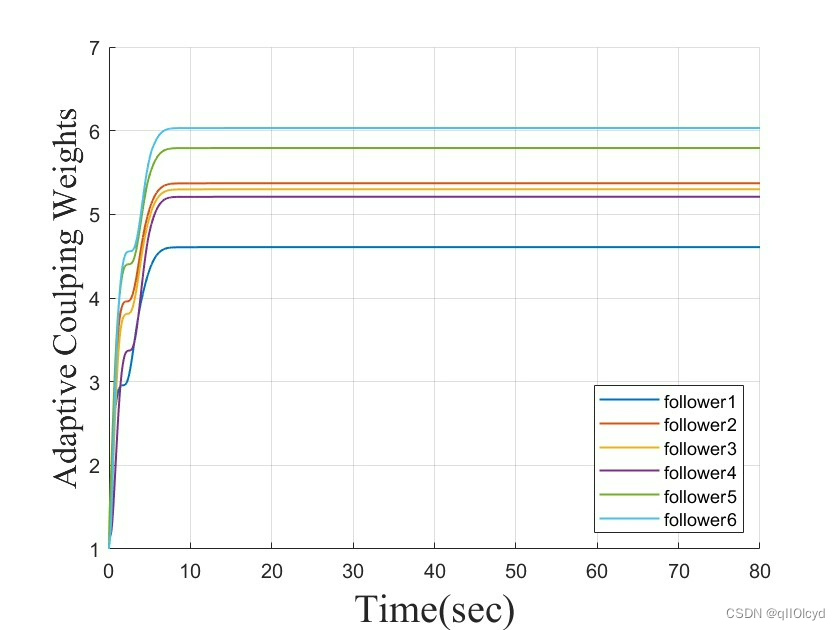
在设计控制器时,我们考虑了编队目标及智能体之间的通信关系。我们将每个智能体的位置和速度误差作为控制输入的反馈量,利用自适应控制方法实现参数的自适应调节。通过对控制器的设计和参数的调节,我们能够使得智能体按照预定的编队目标进行运动。
6. 稳定性分析
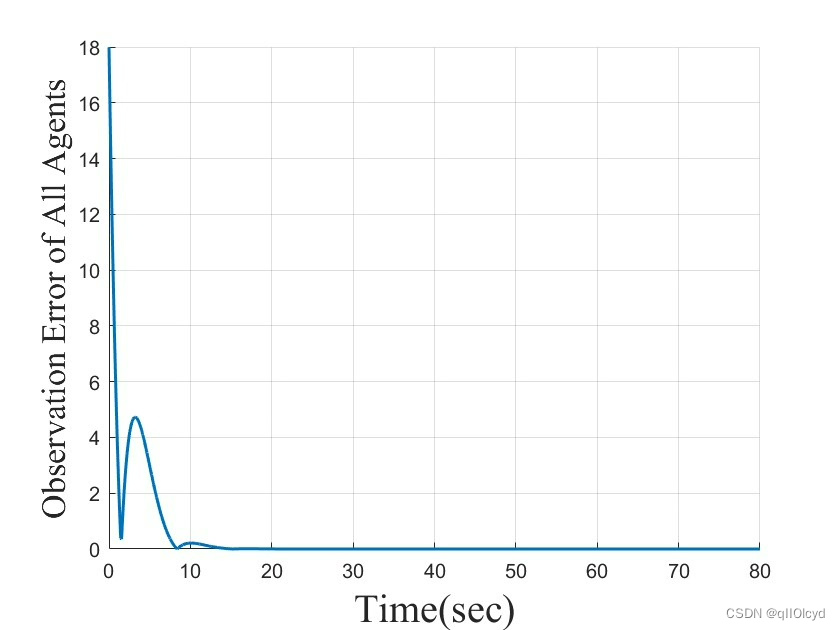
为了验证所提出的控制策略的有效性,我们进行了稳定性分析。通过 Lyapunov 稳定性理论,我们证明了在有向图的情况下,所提出的控制策略能够保证编队的收敛性和稳定性。仿真结果也验证了所提出的控制策略的有效性。
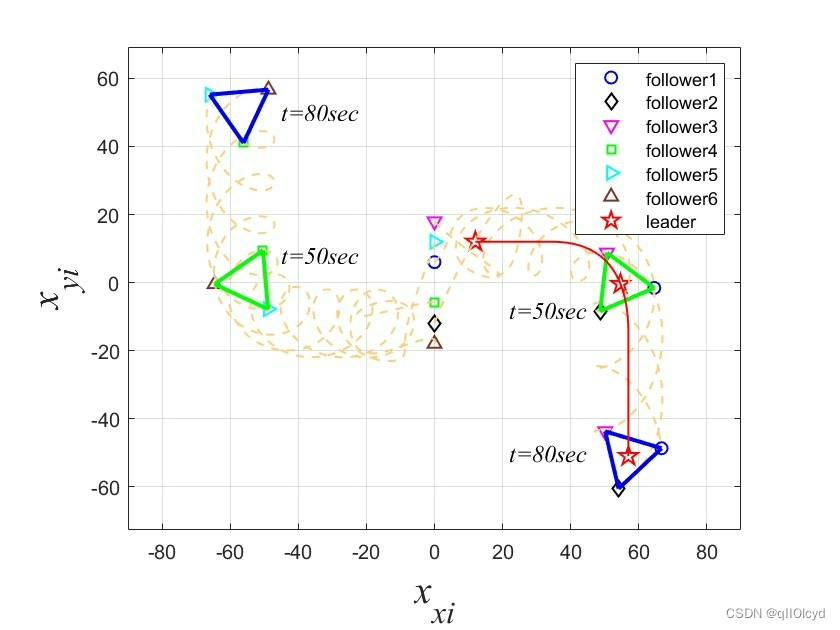
7. 仿真实验
为了验证所提出的控制策略的有效性,我们进行了仿真实验。在实验中,我们使用了一定数量的智能体以及有向图的拓扑结构。通过对控制器的调节和参数的优化,我们使得编队能够按照预定的目标形成和保持。
8. 结论
本文提出了一种自适应二分时变的控制策略,用于解决有向图下的多智能体编队控制问题。通过理论分析和仿真实验,我们验证了所提出的控制策略的有效性。未来的工作可以考虑将该控制策略应用到实际的多智能体系统中,并进一步优化参数和算法,以适应更复杂的情况。
相关代码,程序地址:http://imgcs.cn/lanzoun/717991502907.html















 325
325











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









