






代码链接:【免费】使用Simulink代码生成工具对永磁同步电机进行无传感矢量控制(滑模观测器SMO)资源-CSDN文库
在对FOC无感控制中,最好的入门材料就是microchip的《AN1078 PMSM的无传感器磁场定向控制》资料,它不仅有详细的理论说明,而且还有C语言代码提供。本文在simulink平台搭建了基于低阶滑模观测器的仿真及代码生成模型。
首先感谢Simulink 自动代码生成电机控制:低阶滑模观测器仿真实现及生成代码在开发板上运行_滑模观测器simulink_卡洛斯伊的博客-CSDN博客作者提供的源代码,本文沿用了他的低通滤波器模型。
本文主要介绍以下位置和速度观测框图,其输入为电压输出控制信号、电流检测信号和控制使能信号,输出为速度和位置信号。

滑模观测器由以下结构组成,左侧为反电动势alfa、beta分量观测模块,右侧为转子角位置和速度计算模块。

反电动势观测模块采用microchip的变结构降阶观测器方法,滑模切换采用饱和函数,滑模输出量经过两段以电角速度为截至频率的自适应低通滤波器,分别反馈到电流观测器模型和角位置计算模型中。
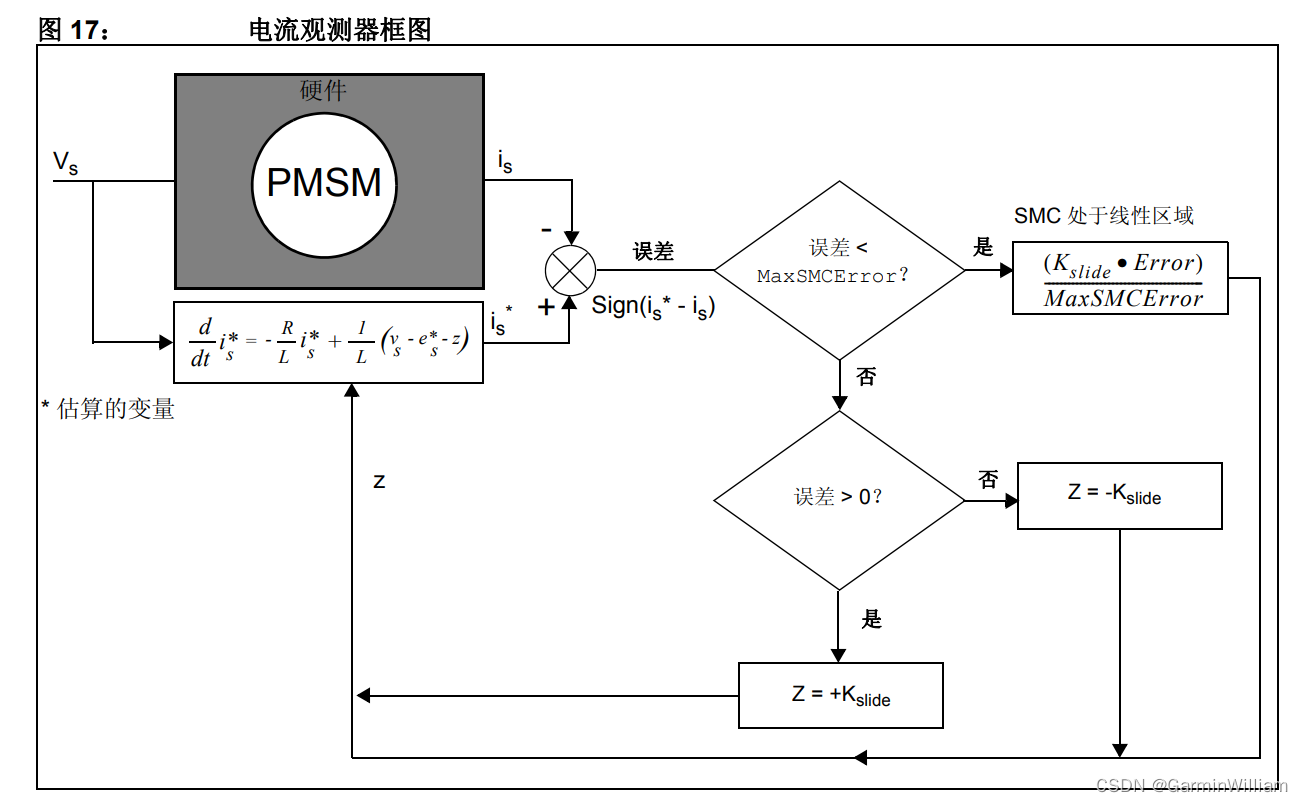
本案例中电流误差限制为±1.5A,电压放大值为5V/1.5A,在程序中进行标幺化处理写入框图中。
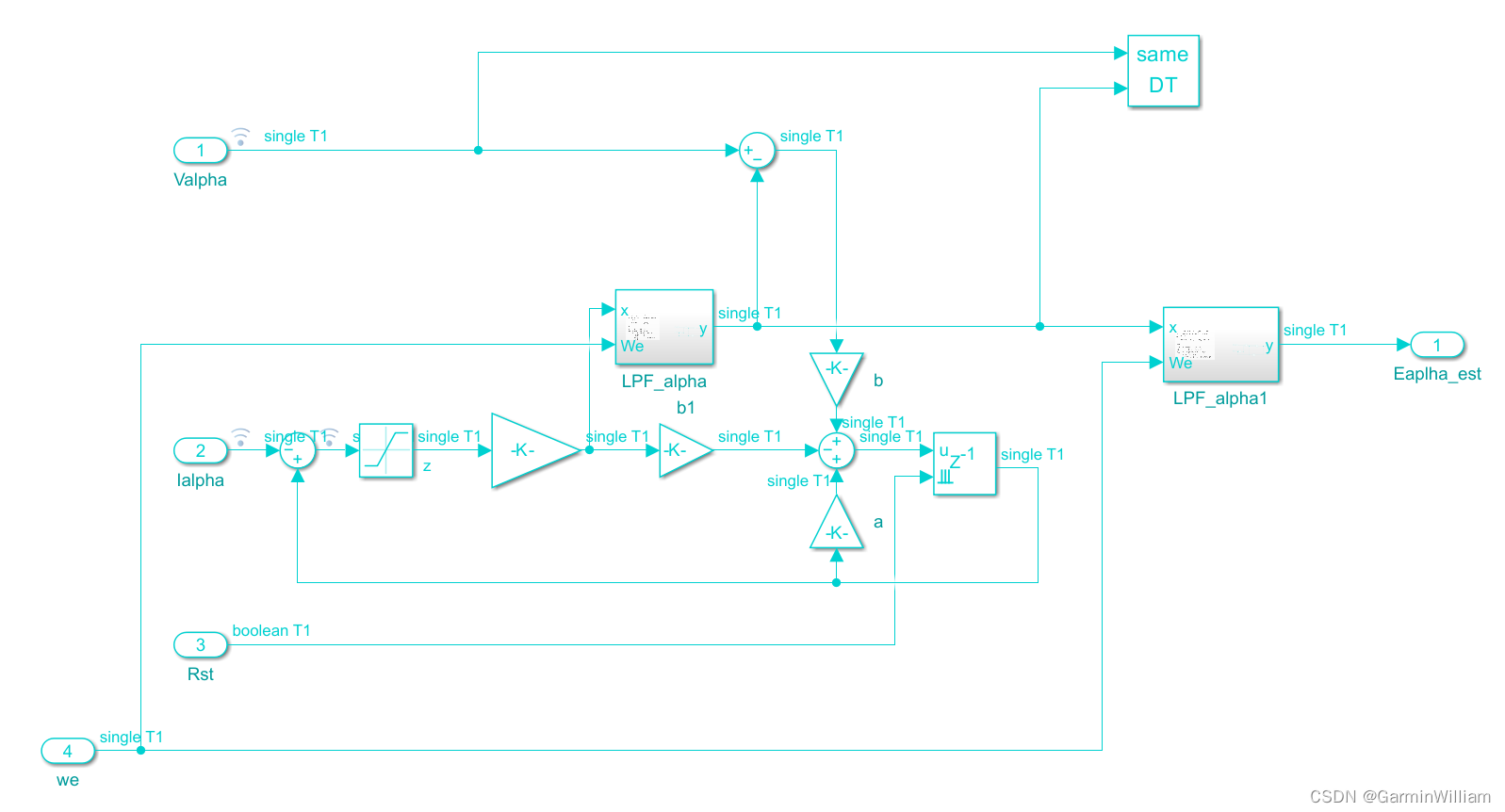
以下框图为角位置计算模块,由于反电动势观测器采用了两段滤波,截止频率都是电角频率,信号经过滤波后会产生延迟,延迟时长为π/4*2。

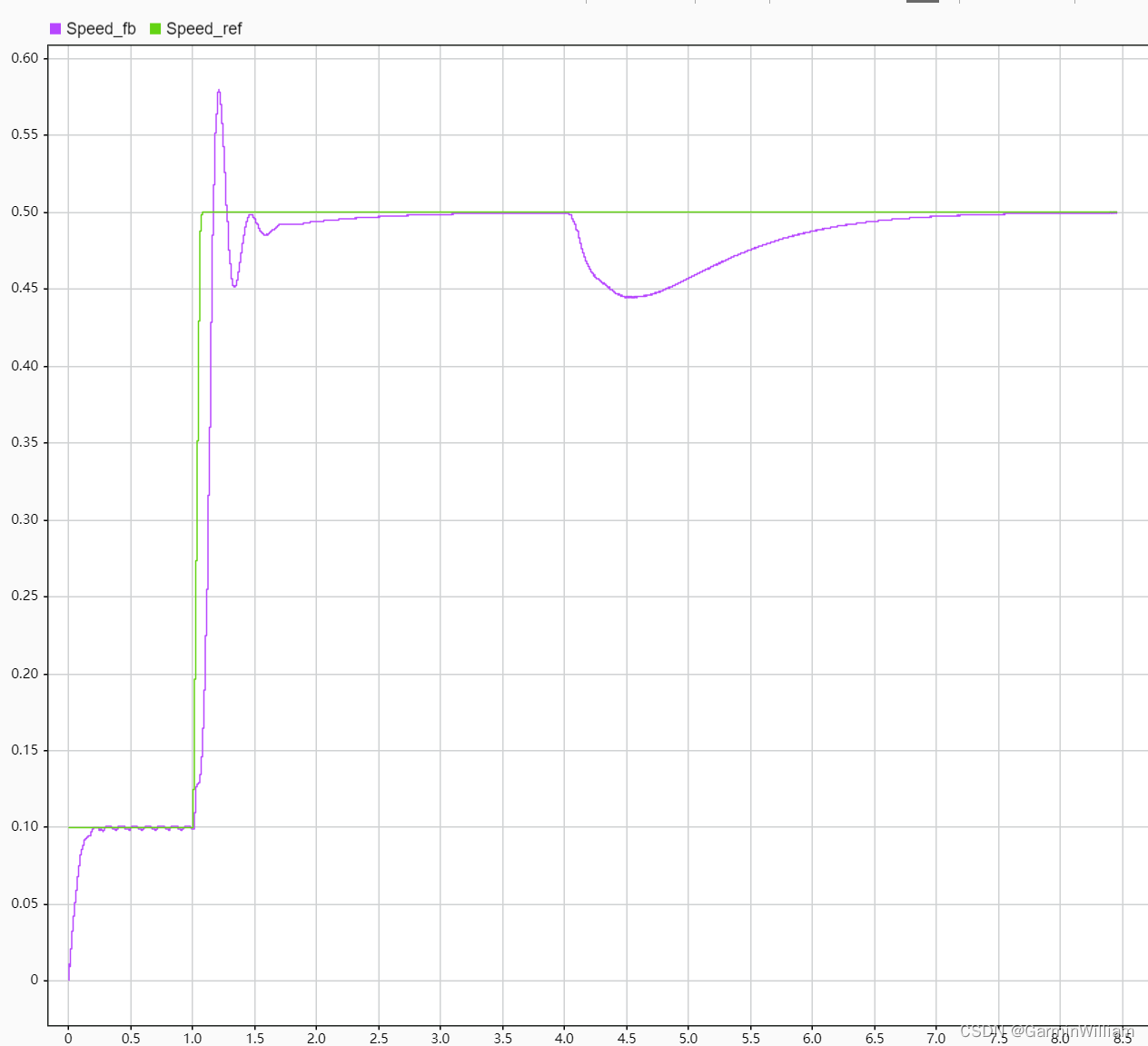
整体模型仿真后,速度反馈信号跟踪速度参考值响应效果良好。
















 528
528











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











