






基于Stanley算法轨迹跟随,横向控制,车道保持的CarSim与Simulink联合仿真模型
提供全套模型文件:
(1)Carsim参数配置文件cpar,导入即可运行
(2)simulink模型文件,模型见上图
(3)提供详细参考资料
ID:8912672692944049
多不多啦米
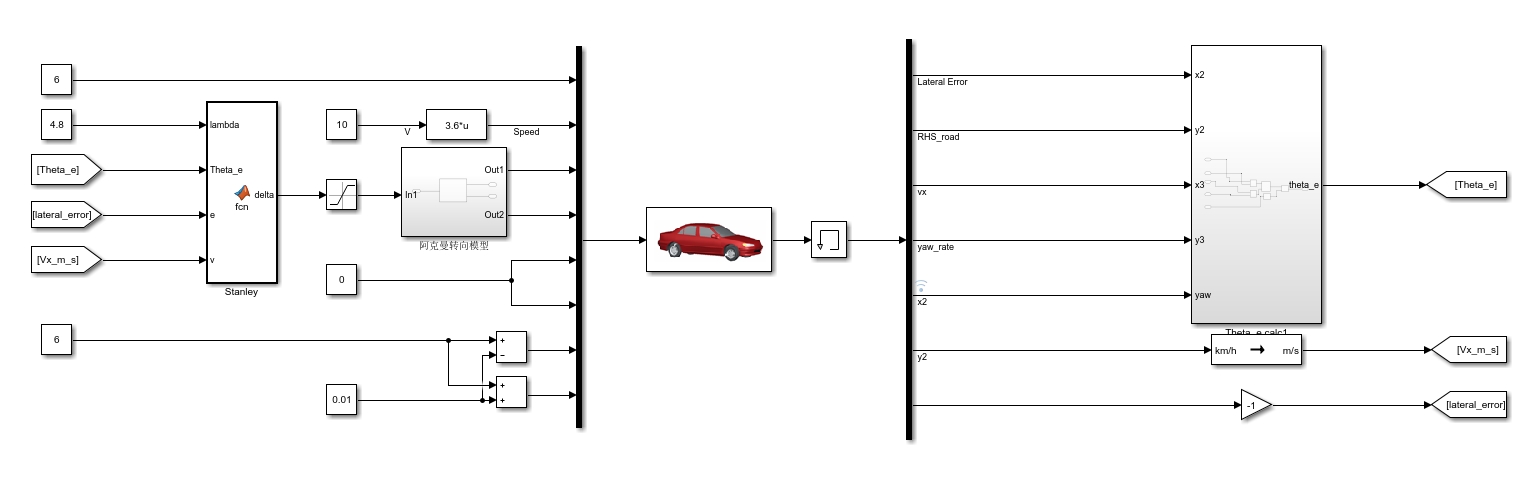


基于Stanley算法的轨迹跟随、横向控制和车道保持是自动驾驶领域中的重要研究方向之一。为了实现高效、精准的自动驾驶系统,我们提出了一个基于Stanley算法的CarSim与Simulink联合仿真模型。
在我们的模型中,我们首先配置了Carsim参数文件cpar,通过导入这个参数文件,即可快速运行模拟。接下来,我们提供了一个详细的Simulink模型文件,该模型文件基于Carsim的参数配置,通过Simulink的强大功能实现了Stanley算法的轨迹跟随、横向控制和车道保持。该模型能够对车辆的轨迹进行实时控制,保持在指定的车道中,并根据实时道路状况进行调整,以确保车辆的安全性和稳定性。
我们的联合仿真模型在Carsim和Simulink之间建立了紧密的联系,在保证模型的高效运行的同时,还能够准确地模拟车辆在不同场景下的行驶情况。通过该模型,我们能够对自动驾驶系统进行全面的测试和验证,从而提高自动驾驶系统的性能和可靠性。
为了帮助读者更好地理解和应用该模型,我们还提供了详细的参考资料。这些参考资料包括了模型的原理解析、参数配置方法和调试技巧等内容,读者可以根据这些资料深入了解模型的细节,并根据自己的需求进行相应的修改和扩展。
总结起来,我们的基于Stanley算法的CarSim与Simulink联合仿真模型是一个功能强大、易于使用的工具,能够帮助研究人员和工程师快速设计和验证自动驾驶系统。通过该模型,我们能够更好地理解和应用Stanley算法,提高自动驾驶系统的性能和可靠性,推动自动驾驶技术的发展。
希望通过我们的模型和参考资料,能够为自动驾驶领域的研究和开发工作提供一定的帮助,促进自动驾驶技术的进一步发展。
相关的代码,程序地址如下:http://wekup.cn/672692944049.html
















 470
470

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









