






使用MATLAB和Simulink的自动驾驶汽车建模acc cacc自适应巡航协同
YID:2830672685982202
一無所有`
在当今科技发展飞速的时代,自动驾驶汽车成为了人们关注的热门话题。随着人工智能和深度学习的不断发展,自动驾驶汽车的技术也越来越成熟。而在自动驾驶汽车的发展过程中,自适应巡航控制(Adaptive Cruise Control, ACC)和自适应巡航协同(Cooperative Adaptive Cruise Control, CACC)是两个非常重要的技术研究方向。
自适应巡航控制是一种基于车辆之间的通信和传感器技术的前沿巡航控制方式。通过使用车辆前方的传感器,ACC可以实时地感知前车的位置和速度,并通过自主控制系统调节车辆的速度,以保持与前车的安全距离。这种技术的出现,大大提高了驾驶的安全性,减少了驾驶员的疲劳程度,同时也降低了车辆之间的碰撞风险。在自适应巡航控制的基础上,自适应巡航协同进一步增加了车辆之间的通信和协作能力。通过车辆之间的实时通信和数据交换,CACC可以更加精确地控制车辆的速度和距离,实现车队之间的高效协同行驶。
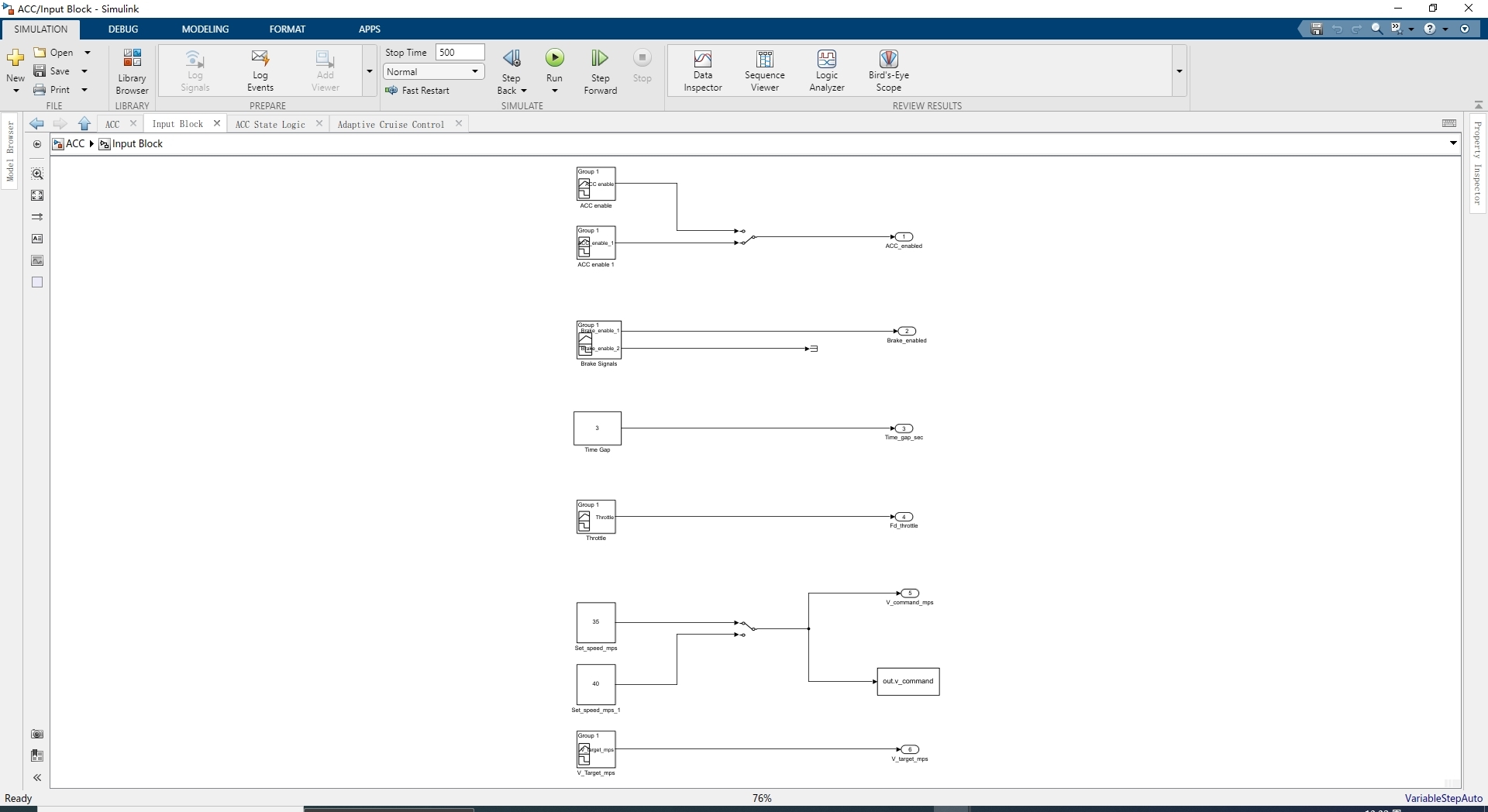
为了实现自适应巡航控制和自适应巡航协同,MATLAB和Simulink成为了众多工程师和研究人员的首选工具。MATLAB是一种高级计算机语言和交互式环境,可以用于数据分析和可视化、算法开发和实验、以及数值计算和模拟。而Simulink是MATLAB的一个扩展工具箱,专门用于进行动态系统建模和仿真。这两个工具的强大功能和灵活性,使得工程师们可以更加方便地进行自适应巡航控制和自适应巡航协同的建模和仿真。
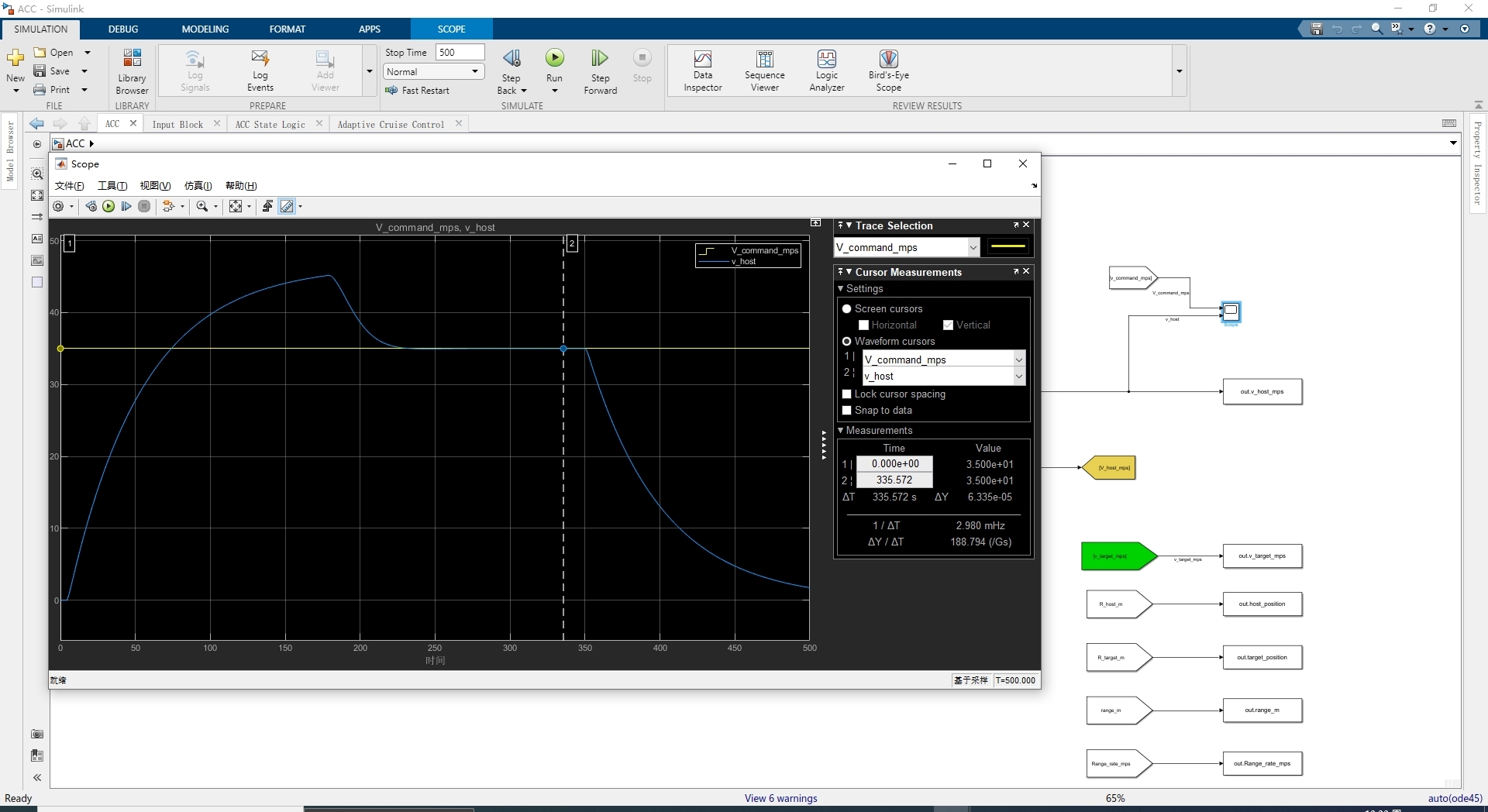
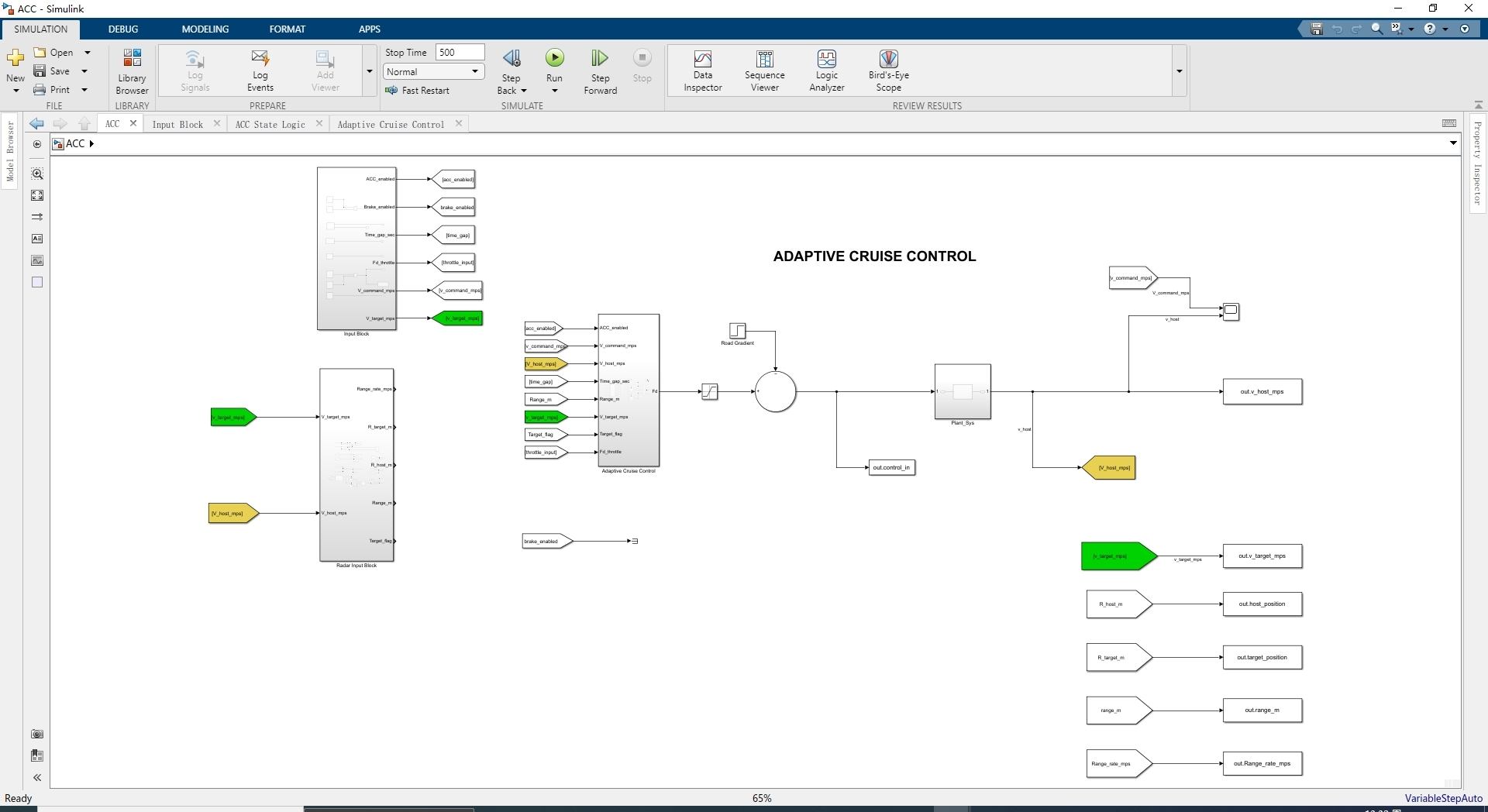
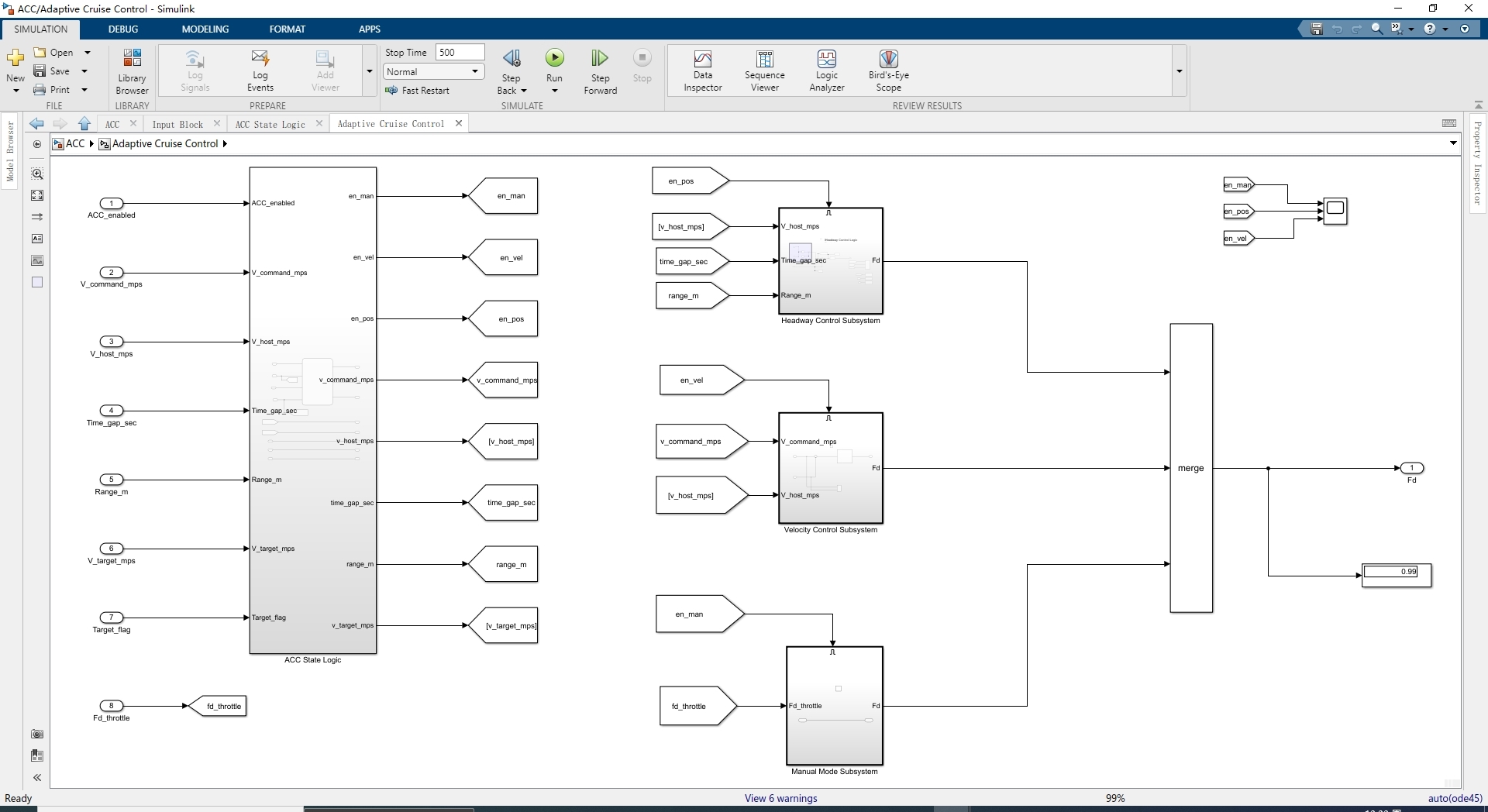
在使用MATLAB和Simulink进行自适应巡航控制和自适应巡航协同的建模过程中,首先需要对车辆和环境进行建模。通过定义车辆的动力学模型和环境的变化条件,可以使用MATLAB的函数和Simulink的图形界面进行建模。在建模过程中,可以使用MATLAB提供的工具进行数据处理和分析,提取出车辆和环境的关键特征。然后,可以使用Simulink进行仿真,验证建模的准确性和可行性。通过不断调整和优化模型的参数和算法,可以得到更加精准和稳定的控制策略。
在自适应巡航控制和自适应巡航协同的研究中,还需要考虑到实际道路环境的复杂性和不确定性。道路上的交通状况、车辆的变道和加减速等因素都会对自动驾驶汽车的控制产生影响。因此,需要在模型中引入实时的传感器数据和路况信息,以便更加真实地模拟车辆的行为和环境的变化。同时,还需要考虑到车辆之间的通信和协作机制,以确保车队的行驶安全和效率。通过使用MATLAB和Simulink提供的工具和函数,可以更好地模拟和分析这些复杂场景,为自适应巡航控制和自适应巡航协同提供科学依据和技术支持。
总之,使用MATLAB和Simulink进行自适应巡航控制和自适应巡航协同的建模和仿真,可以极大地提高自动驾驶汽车的控制精度和安全性。通过建立准确的车辆和环境模型,并考虑到复杂的道路条件和车辆之间的通信协作,可以有效地优化自动驾驶汽车的行驶策略,提高驾驶的舒适性和效率。随着科技的不断进步和应用的扩大,相信自适应巡航控制和自适应巡航协同技术将会在未来的智能交通系统中发挥越来越重要的作用。让我们共同期待自动驾驶汽车的美好未来!
相关的代码,程序地址如下:http://wekup.cn/672685982202.html
















 142
142

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









