






0开始配置Cartographer
配置教程
配置使用的是小鱼的一键安装:
wget http://fishros.com/install -O fishros && . fishros
一键安装:ROS(支持ROS和ROS2,树莓派Jetson)和一键安装:cartographer和一键配置:rosdep(小鱼的rosdepc,又快又好用)
然后使用这条命令:
cd ~/cartographer_ws
rosdep install --from-paths src --ignore-src --rosdistro=noetic -r -y
然后编译:
catkin_make_isolated --install --use-ninja
日期:12-19
硬件:激光雷达+IMU
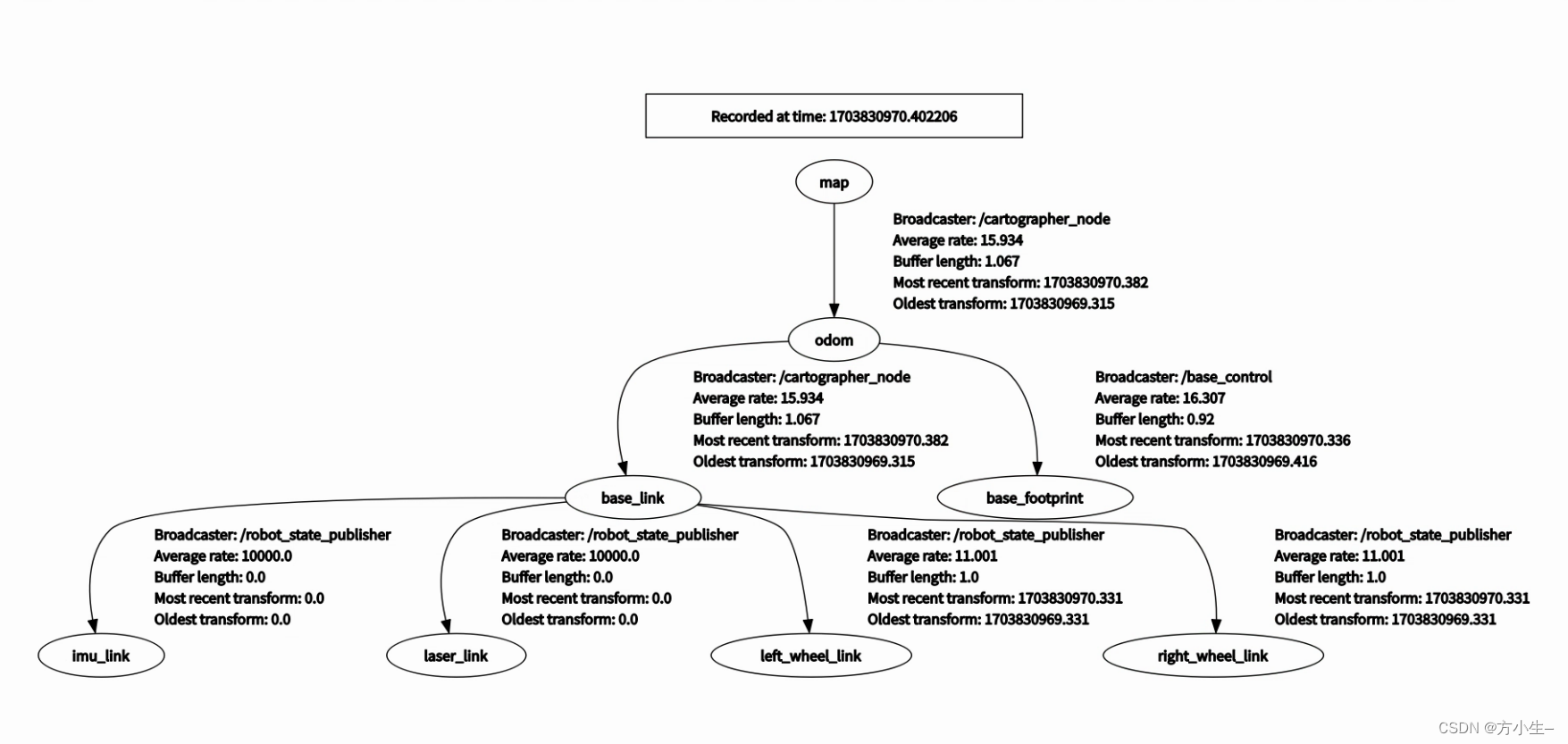
小车的tf变换:
建图配置
lua文件配置:my_robot.lua
include "map_builder.lua"
include "trajectory_builder.lua"
options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map",
tracking_frame = "imu_link",
published_frame = "base_link",
odom_frame = "odom",
provide_odom_frame = true,
publish_frame_projected_to_2d = true,
use_pose_extrapolator = false,
use_odometry = false,
use_nav_sat = false,
use_landmarks = false,
num_laser_scans = 1,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 10,
num_point_clouds = 0,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 1.,
odometry_sampling_ratio = 1.,
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1.,
landmarks_sampling_ratio = 1.,
}
MAP_BUILDER.use_trajectory_builder_2d = true
TRAJECTORY_BUILDER_2D.num_accumulated_range_data = 10
return options
launch配置:my_robot_map.launch
<launch>
<!-- <param name="robot_description"
textfile="$(find cartographer_ros)/urdf/my_robot_2d.urdf" />
<node name="robot_state_publisher" pkg="robot_state_publisher"
type="robot_state_publisher" /> -->
<node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory $(find cartographer_ros)/configuration_files
-configuration_basename my_robot.lua"
output="screen">
<remap from="scan" to="scan" />
<remap from="imu" to="imu" />
<!-- <remap from="odom" to="odom" /> -->
</node>
<node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"
type="cartographer_occupancy_grid_node" args="-resolution 0.05" />
<node name="rviz" pkg="rviz" type="rviz" required="true"
args="-d $(find cartographer_ros)/configuration_files/demo_2d.rviz" />
</launch>
源码修改
文件路径:/home/hgrobot/cartographer_ws/src/cartographer_ros/cartographer_ros/cartographer_ros/occupancy_grid_node_main.cc
建图需要取消注释
// 注释不发送地图
// occupancy_grid_publisher_.publish(*msg_ptr);
重新编译
catkin_make_isolated --install --use-ninja
source环境
catkin_make_isolated --install --use-ninja
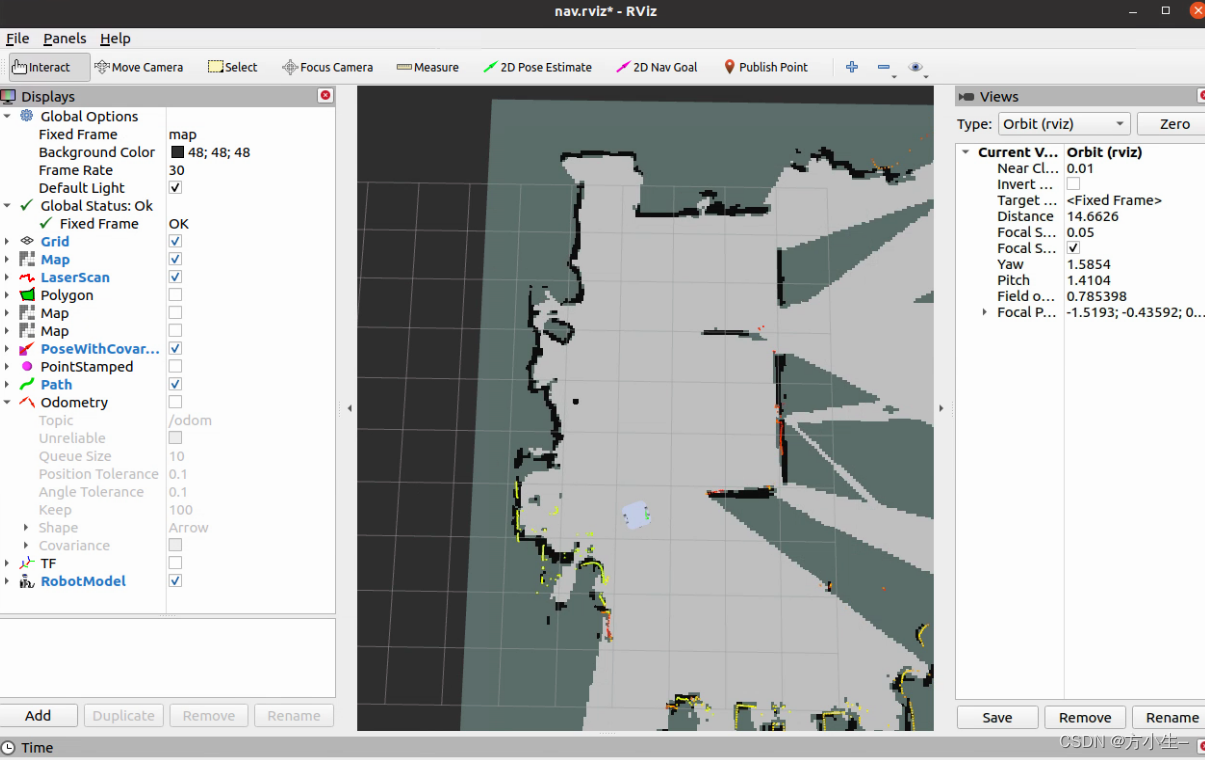
运行并建图
启动底盘和imu:
roslaunch castlex_plus_bringup castlex_plus_bringup.launch
启动雷达:
roslaunch wj_716_lidar wj.launch
启动建图:
roslaunch cartographer_ros my_robot_map.launch
启动键盘控制:
roslaunch castlex_keyboard_control keyboard_control.launch
停止接收地图数据:
rosservice call /finish_trajectory 0
保存地图:
rosservice call /write_state "{filename: '/home/hgrobot/cartographer_ws/src/cartographer_ros/cartographer_ros/map/map.pbstream'}"
将地图转成png:
rosrun cartographer_ros cartographer_pbstream_to_ros_map -map_filestem=/home/hgrobot/ws/src/castlex_navigation/maps/map -pbstream_filename=/home/hgrobot/cartographer_ws/src/cartographer_ros/cartographer_ros/map/map.pbstream -resolution=0.05
导航配置
源码修改:
文件路径:/home/hgrobot/cartographer_ws/src/cartographer_ros/cartographer_ros/cartographer_ros/occupancy_grid_node_main.cc
导航需要注释
// 注释不发送地图
// occupancy_grid_publisher_.publish(*msg_ptr);
launch配置:my_robot_2d_localization.launch
<launch>
<arg name="load_state_filename" default="/home/hgrobot/cartographer_ws/src/cartographer_ros/cartographer_ros/map/map.pbstream"/>
<node name="cartographer_node" pkg="cartographer_ros"
type="cartographer_node" args="
-configuration_directory $(find cartographer_ros)/configuration_files
-configuration_basename my_robot_location.lua
-load_state_filename $(arg load_state_filename)"
output="screen">
<remap from="scan" to="scan" />
<remap from="imu" to="imu" />
</node>
<node name="cartographer_occupancy_grid_node" pkg="cartographer_ros"
type="cartographer_occupancy_grid_node" args="-resolution 0.05 " /> <!-- 增加是否纯定位模式参数pure_localization -->
</launch>
lua文件配置:
include "my_robot.lua"
TRAJECTORY_BUILDER.pure_localization_trimmer = {
max_submaps_to_keep = 3,
}
POSE_GRAPH.optimize_every_n_nodes =100
return options
启动底盘和imu:
roslaunch castlex_plus_bringup castlex_plus_bringup.launch
启动雷达:
roslaunch wj_716_lidar wj.launch
启动定位:
注意小车启动位置要和开始位置一样
roslaunch cartographer_ros my_robot_2d_localization.launch
启动导航:
roslaunch castlex_navigation teb_nav.launch
遇到的问题:
编译错误—解决方法:删除build,重新编译
小车跳变—tf有问题,小车底盘发布的是odom-base_footprint的tf变换,没有发布base_footprint-base_link的变换,move_base设置的是base_link,map,odom。使用的是teb算法。
存在问题:
1.建图和定位切换需要修改源码
2.不能自动重定位















 8446
8446











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









