







 超级会员免费看
超级会员免费看
1)概要
在 ROS 中,Xacro(XML Macro Language)是一种用于简化 URDF(机器人描述文件)的宏语言,通过参数化、模块化和代码复用,让复杂机器人模型的定义更加简洁高效。结合 Gazebo 仿真时,Xacro 能显著提升 URDF 模型的可读性和维护性,尤其适合定义包含物理属性、传感器、控制器的复杂机器人。
2)结果展示
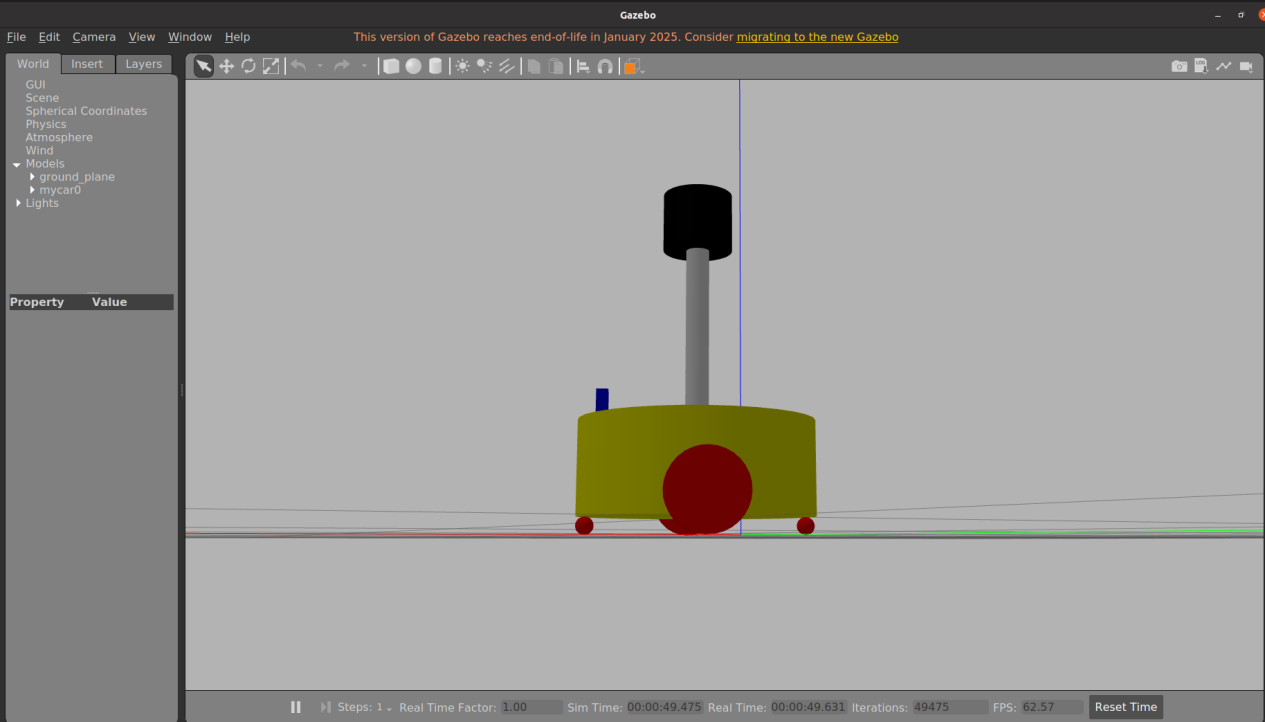
1)概要
在 ROS 中,Xacro(XML Macro Language)是一种用于简化 URDF(机器人描述文件)的宏语言,通过参数化、模块化和代码复用,让复杂机器人模型的定义更加简洁高效。结合 Gazebo 仿真时,Xacro 能显著提升 URDF 模型的可读性和维护性,尤其适合定义包含物理属性、传感器、控制器的复杂机器人。
2)结果展示

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文


























