









Overall
-
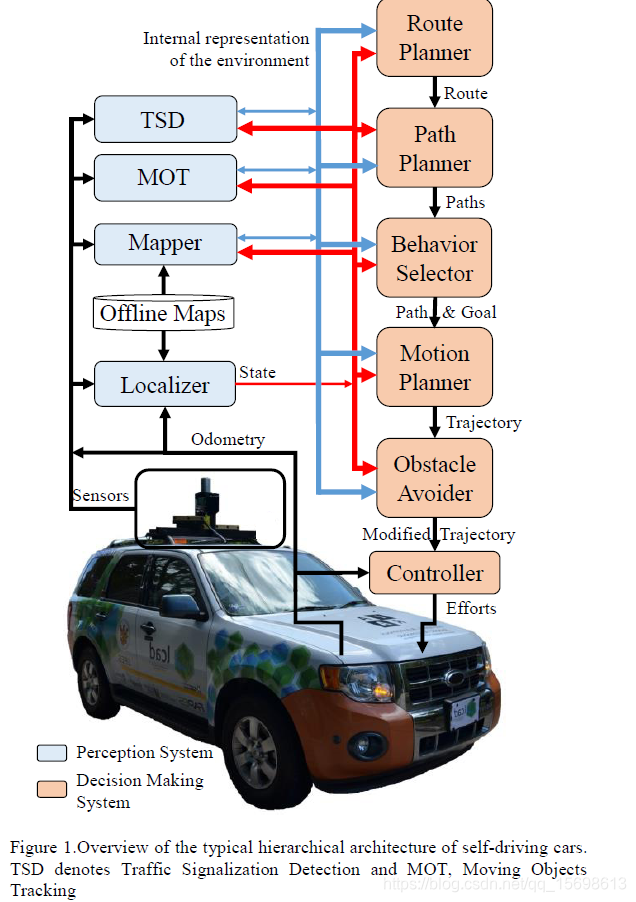
Self-Driving Cars: A Survey [Paper]
- Claudine Badue, Rânik Guidolini, Raphael Vivacqua Carneiro, Pedro Azevedo, Vinicius Brito Cardoso, Avelino Forechi, Luan Ferreira Reis Jesus, Rodrigo Ferreira Berriel, Thiago Meireles Paixão, Filipe Mutz, Thiago Oliveira-Santos, Alberto Ferreira De Souza
- Claudine Badue, Rânik Guidolini, Raphael Vivacqua Carneiro, Pedro Azevedo, Vinicius Brito Cardoso, Avelino Forechi, Luan Ferreira Reis Jesus, Rodrigo Ferreira Berriel, Thiago Meireles Paixão, Filipe Mutz, Thiago Oliveira-Santos, Alberto Ferreira De Souza
-
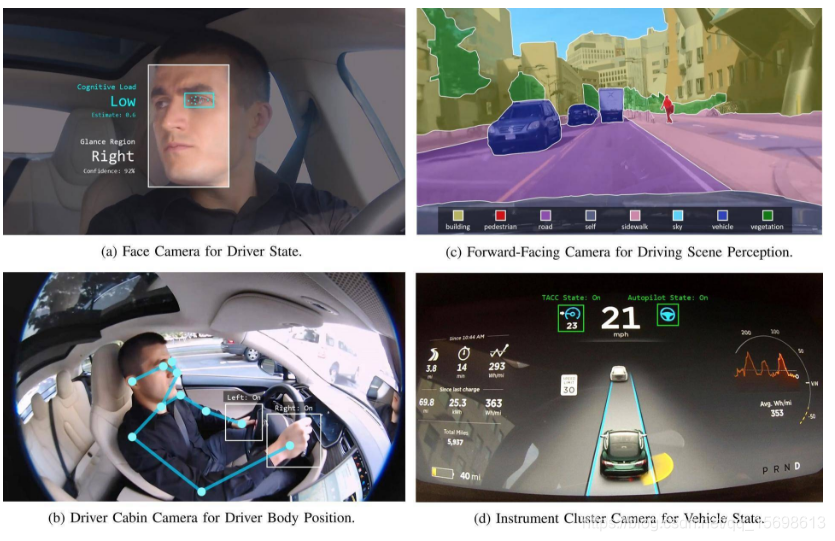
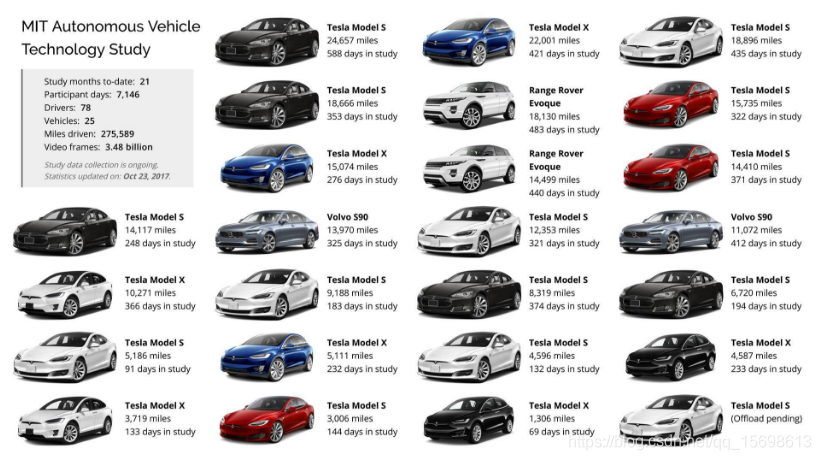
MIT Autonomous Vehicle Technology Study: Large-Scale Deep Learning Based Analysis of Driver Behavior and Interaction with Automation [Paper]
- Lex Fridman, Daniel E. Brown, Michael Glazer, William Angell, Spencer Dodd, Benedikt Jenik,
Jack Terwilliger, Julia Kindelsberger, Li Ding, Sean Seaman, Hillary Abraham, Alea Mehler,
Andrew Sipperley, Anthony Pettinato, Bobbie Seppelt, Linda Angell, Bruce Mehler, Bryan Reimer
- Lex Fridman, Daniel E. Brown, Michael Glazer, William Angell, Spencer Dodd, Benedikt Jenik,
- Reading Material Advanced Machine Learning by SungjuHwang [github]
Level 0:无自动化(No Automation)
没有任何自动驾驶功能或技术,人类驾驶员对汽车所有功能拥有绝对控制权。驾驶员需要负责转向、加速、制动和观察道路状况。任何驾驶辅助技术,例如现有的前向碰撞预警、车道偏离预警,以及自动雨刷和自动前灯控制等,虽然有一定的智能化,但是仍需要人来控制车辆,所以都仍属于 Level 0。
Level 1:驾驶辅助(Driver Assistance)
驾驶员仍然对行车安全负责,不过可以授权部分控制权给系统管理,某些功能可以自动进行,比如常见的自适应巡航(Adaptive Cruise Control,ACC)、应急刹车辅助(Emergency Brake Assist,EBA)和车道保持(Lane-Keep Support,LKS)。Level 1 的特点是只有单一功能,驾驶员无法做到手和脚同时不操控。
Level 2:部分自动化(Partial Automation)
人类驾驶员和汽车来分享控制权,驾驶员在某些预设环境下可以不操作汽车,即手脚同时离开控制,但驾驶员仍需要随时待命,对驾驶安全负责,并随时准备在短时间内接管汽车驾驶权。比如结合了 ACC 和 LKS 形成的跟车功能。Level 2 的核心不在于要有两个以上的功能,而在于驾驶员可以不再作为主要操作者。
Level 3:有条件自动化(Conditional Automation)
在有限情况下实现自动控制,比如在预设的路段(如高速和人流较少的城市路段),汽车自动驾驶可以完全负责整个车辆的操控,但是当遇到紧急情况,驾驶员仍需要在某些时候接管汽车,但有足够的预警时间,如即将进入修路的路段(Road work ahead)。Level 3 将解放驾驶员,即对行车安全不再负责,不必监视道路状况。
Level 4:高度自动化(High Automation)
自动驾驶在特定的道路条件下可以高度自动化,比如封闭的园区、高速公路、城市道路或固定的行车线路等,这这些受限的条件下,人类驾驶员可以全程不用干预。
Level 5:完全自动化(Full Automation)
对行车环境不加限制,可以自动地应对各种复杂的交通状况和道路环境等,在无须人协助的情况下由出发地驶向目的地,仅需起点和终点信息,汽车将全程负责行车安全,并完全不依赖驾驶员干涉,且不受特定道路的限制。


















 1002
1002

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









