







 本文档详细介绍了如何使用KinectV2采集RGB和深度图像,保存为ROS格式,并生成类似TUM的数据集。内容涵盖图像同步采集、转换为OpenCV Mat格式、保存图像及txt文件,以及associate.txt的生成。通过遵循步骤,读者可以离线进行三维稠密建图程序的测试。
本文档详细介绍了如何使用KinectV2采集RGB和深度图像,保存为ROS格式,并生成类似TUM的数据集。内容涵盖图像同步采集、转换为OpenCV Mat格式、保存图像及txt文件,以及associate.txt的生成。通过遵循步骤,读者可以离线进行三维稠密建图程序的测试。
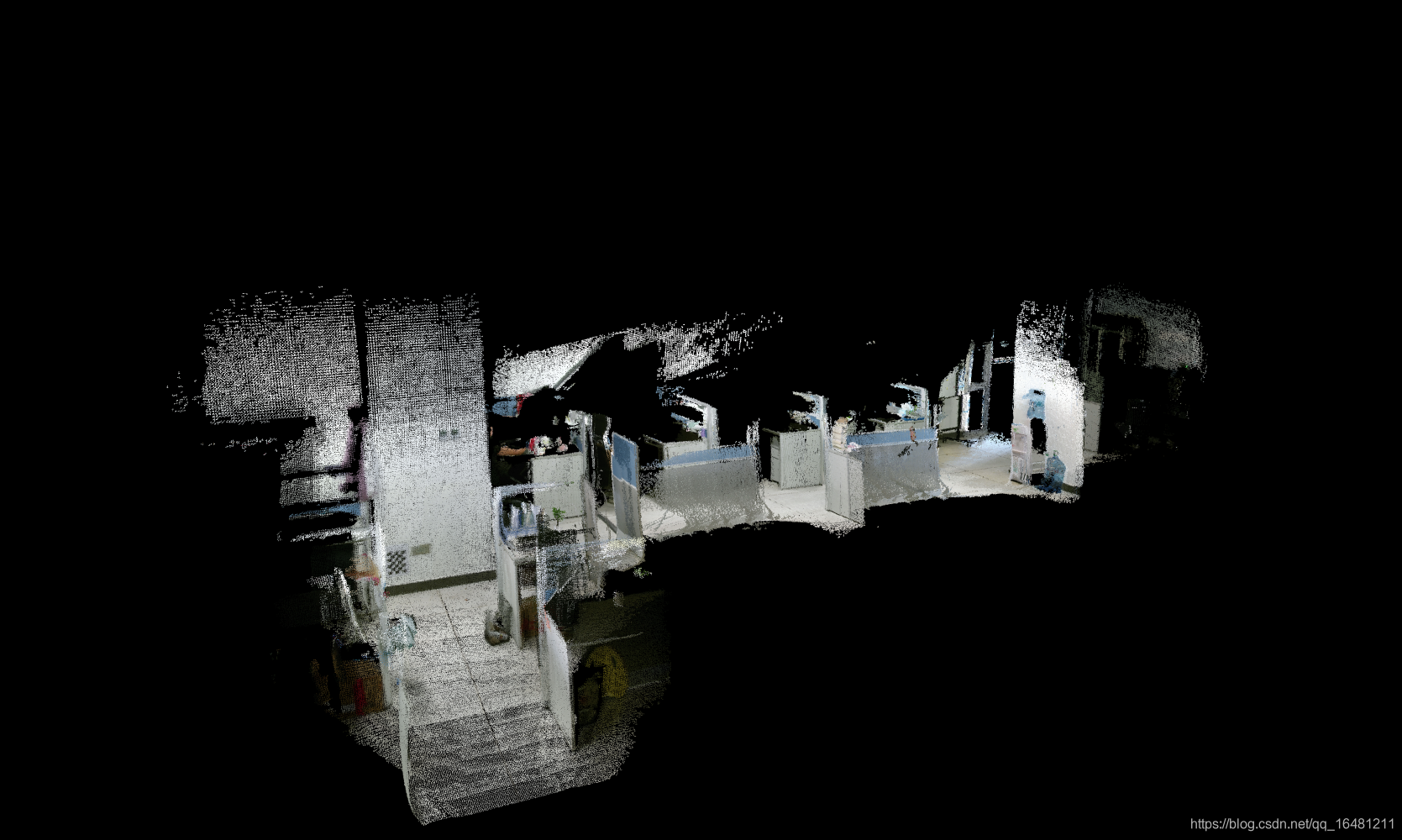
0 最终测试
这里用自己生成的数据集离线跑一个三维稠密建图的程序。
如果遇到问题可以发邮件咨询: m13713917385@163.com
推荐一门课程

在跑slam时,每次都要拿着相机测试,比较麻烦,而且在跑稠密建图时相邻帧之间的耗时很久,不适合实时测试。需要将整个轨迹的照片保存下来离线运行。kinectV2深度相机可以生成RGB彩图和深度图,我们可以通过采集照片生成类似于TUM形式的数据集。
TUM数据集主要包括彩图文件夹,深度图文件夹,rgb.txt,depth.txt,associate.txt。
在运行slam时,先读取associate.txt文件,获得一对彩图和深度图的路径,然后通过对应的路径读取相应的彩图和深度图。
下面主要分:图像采集和保存,associate.txt文件生成 两个部分来制作自己的数据集。

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 1580
1580

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











