







❤️ 如果你也关注 AI 的发展现状,且对 AI 应用开发非常感兴趣,我会每日跟你分享最新的 AI 资讯和开源应用,也会不定期分享自己的想法和开源实例,欢迎关注我哦!
🥦 微信公众号|搜一搜:蚝油菜花 🥦
🚀 快速阅读
- 模型介绍:RDT是全球最大的双臂机器人操作任务扩散基础模型,具备十亿参数量,能够自主完成复杂任务。
- 主要功能:RDT支持双臂协调操作、自主任务执行、高精确度操作、语言指令理解和少样本学习。
- 技术原理:RDT结合多模态输入编码、Transformer骨干网络和预训练与微调技术,展现出强大的泛化能力和操作精度。
正文(附运行示例)
RDT 是什么
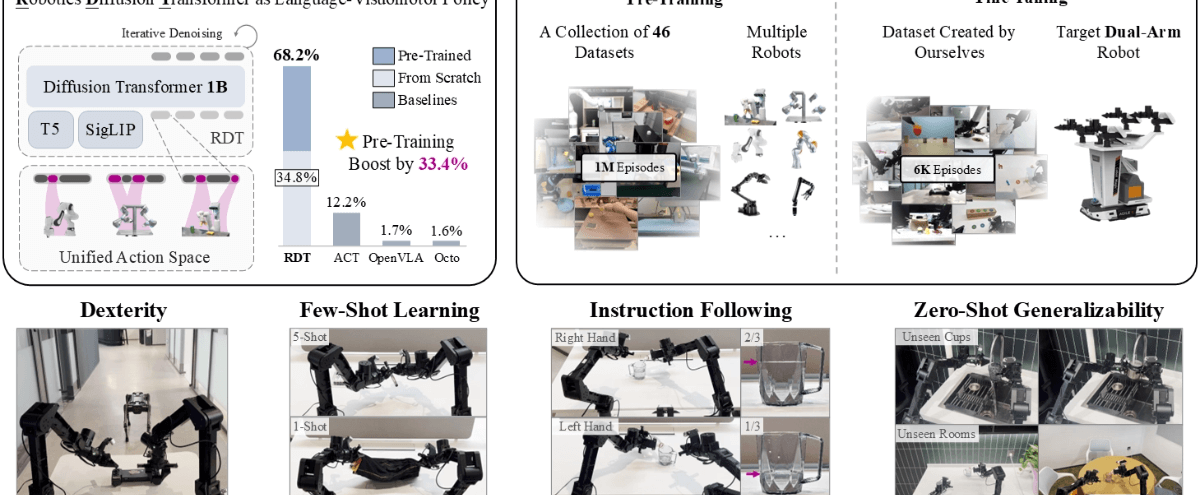
RDT(Robotics Diffusion Transformer)是由清华大学AI研究院TSAIL团队推出的全球最大的双臂机器人操作任务扩散基础模型。RDT具备十亿参数量,能够在无需人类操控的情况下自主完成复杂任务,如调酒和遛狗。RDT基于模仿学习人类动作,展现出强大的泛化能力和操作精度,能够处理未见过的物体和场景。清华团队已将RDT的代码、模型和训练数据集开源,推动机器人技术的发展和应用。
RDT的核心在于其多模态输入编码和Transformer骨干网络,结合语言、视觉和动作三种模态,能够处理复杂的机器人操作任务。
RDT 的主要功能
- 双臂协调操作:指挥机器人的双臂协同工作,完成复杂的物理任务,例如调酒和遛狗。
- 自主任务执行:无需人类直接操控,自主完成之前未见过的全新任务。
- 高精确度操作:RDT能够进行精确的操作,如控制机器狗走直线,需要极高的操作精度。
- 语言指令理解:理解并遵循人类的自然语言指令,执行相应的动作。
- 少样本学习:RDT具有强大的学习能力,只需少量演示即可学会新技能。
RDT 的技术原理
- 多模态输入编码:RDT结合语言、视觉和动作三种模态,基于不同的编码方式处理输入。
- 动作编码:具有傅里叶特征的多层感知机(MLP)。
- 图片编码:基于经过对齐的SigLIP。
- 语言编码:使用T5-XXL语言模型。
- Transformer骨干网络:RDT采用Transformer作为骨干网络,针对机器人操作进行关键修改。
- QKNorm和RMSNorm:缓解传感器失灵导致的极端值问题。
- 非线性MLP解码器:增强对非线性动力学的近似能力。
- 交替注入:平衡图像和文本模态,防止信息淹没。
- 预训练与微调:RDT在大规模的具身数据集上进行预训练,获得泛化性,基于高质量的双臂微调数据集进行微调,增强双臂操作能力。
- 统一动作空间:构建统一的动作空间,统一不同机器人数据的格式,让模型从不同数据中学习共享的物理规律。
如何运行 RDT
安装环境
- 克隆仓库并安装依赖:
git clone git@github.com:thu-ml/RoboticsDiffusionTransformer.git
cd RoboticsDiffusionTransformer
conda create -n rdt python=3.10.0
conda activate rdt
pip install torch==2.1.0 torchvision==0.16.0 --index-url https://download.pytorch.org/whl/cu121
pip install packaging==24.0
pip install flash-attn --no-build-isolation
pip install -r requirements.txt
- 下载多模态编码器并链接到仓库目录:
mkdir -p google
ln -s /path/to/t5-v1_1-xxl google/t5-v1_1-xxl
ln -s /path/to/siglip-so400m-patch14-384 google/siglip-so400m-patch14-384
微调模型
- 准备数据集并链接至仓库目录:
cd data
mkdir -p datasets
ln -s /path/to/my_cool_dataset datasets/my_cool_dataset
- 实现数据集加载器并计算数据集统计信息:
python -m data.compute_dataset_stat_hdf5
- 启动微调:
source finetune.sh
部署到真实机器人
- 修改机器人动作格式转换函数:
def _format_joint_to_state(self, joint_state):
# 将机器人原始动作转换为RDT接受的统一动作向量
- 运行推理脚本:
python -m scripts.agilex_inference --pretrained_model_name_or_path=<PATH TO MODEL CHECKPOINT>
资源
- 项目官网:https://rdt-robotics.github.io/rdt-robotics
- GitHub 仓库:https://github.com/thu-ml/RoboticsDiffusionTransformer
- HuggingFace 模型库:https://huggingface.co/robotics-diffusion-transformer/rdt-1b
- arXiv 技术论文:https://arxiv.org/pdf/2410.07864
❤️ 如果你也关注 AI 的发展现状,且对 AI 应用开发非常感兴趣,我会每日跟你分享最新的 AI 资讯和开源应用,也会不定期分享自己的想法和开源实例,欢迎关注我哦!
🥦 微信公众号|搜一搜:蚝油菜花 🥦

















 654
654

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









