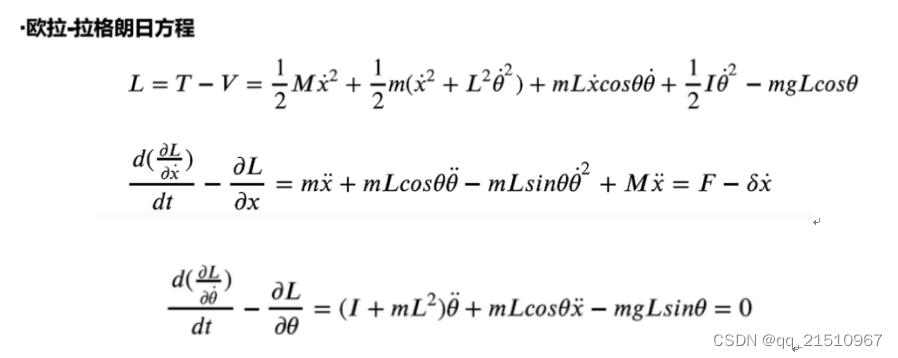
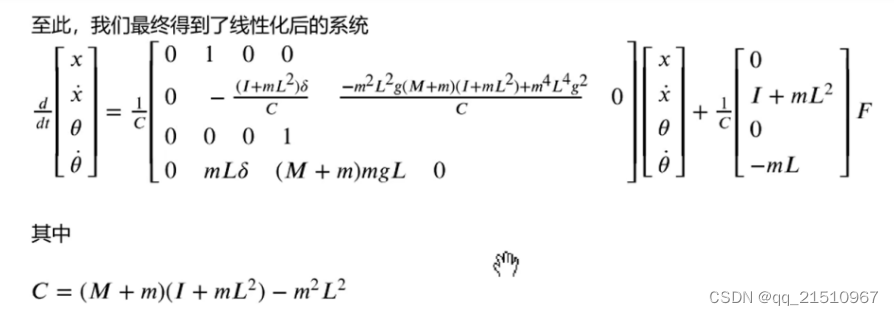
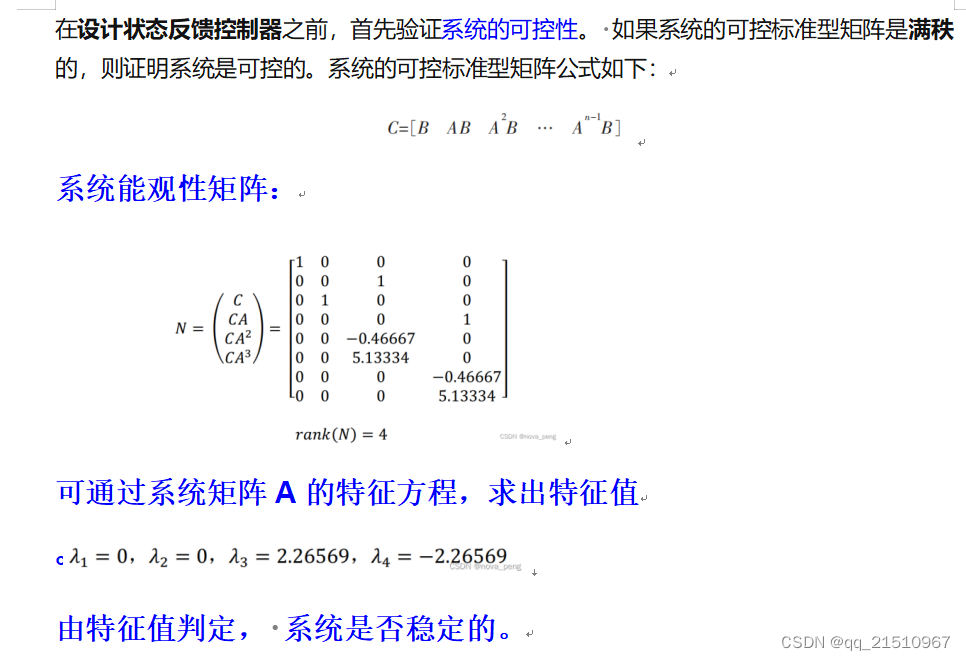
1:倒立摆的系统建模 (根据拉格朗日力学对系统进行动力学建模。) 进行合理的线性化和拉普拉斯变换,可以得到系统的传递函数,最后转化为状态空间形式的倒立摆系统动力学方程。 2:LQR最优控制 3: 能控性质分析







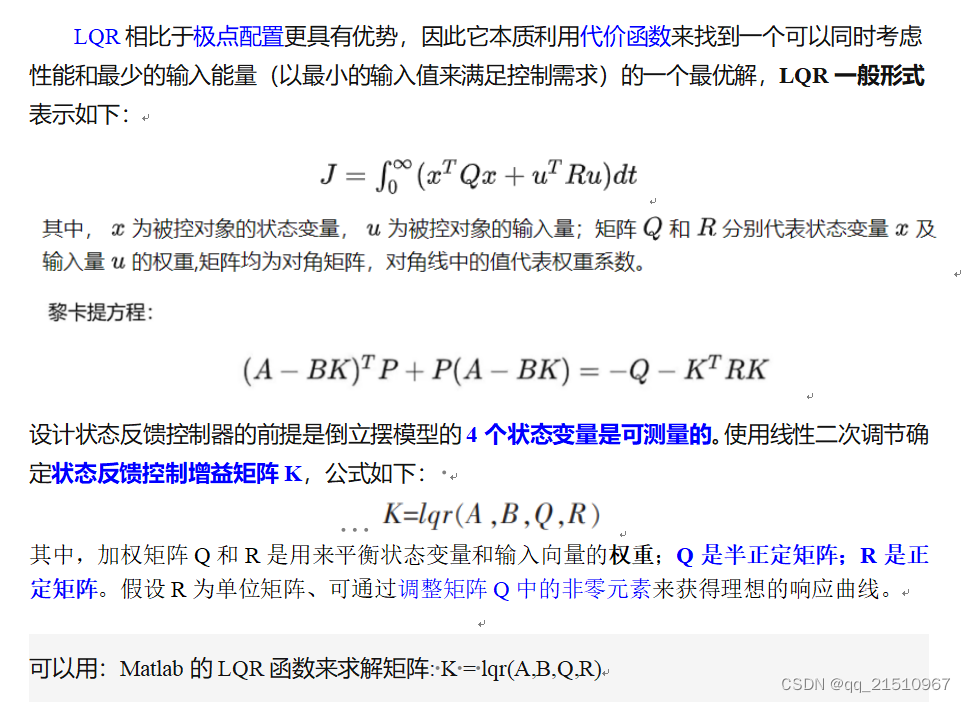
 1085
347
1085
347

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























